Изобретение относится к электромеханическим манипуляторам промышленных роботов, преимущественно работаюш,их в сферической системе координат.
Целью изобретения является упрощение конструкции манипулятора путем выполнения его привода без использования механических передач.
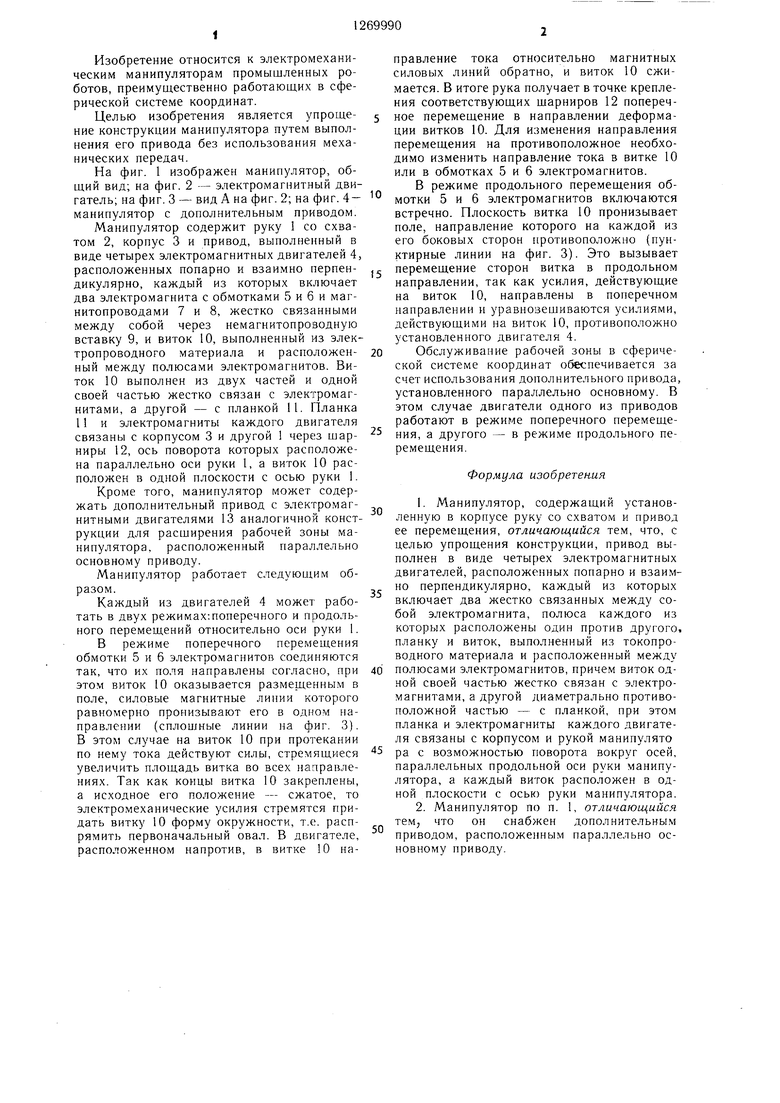
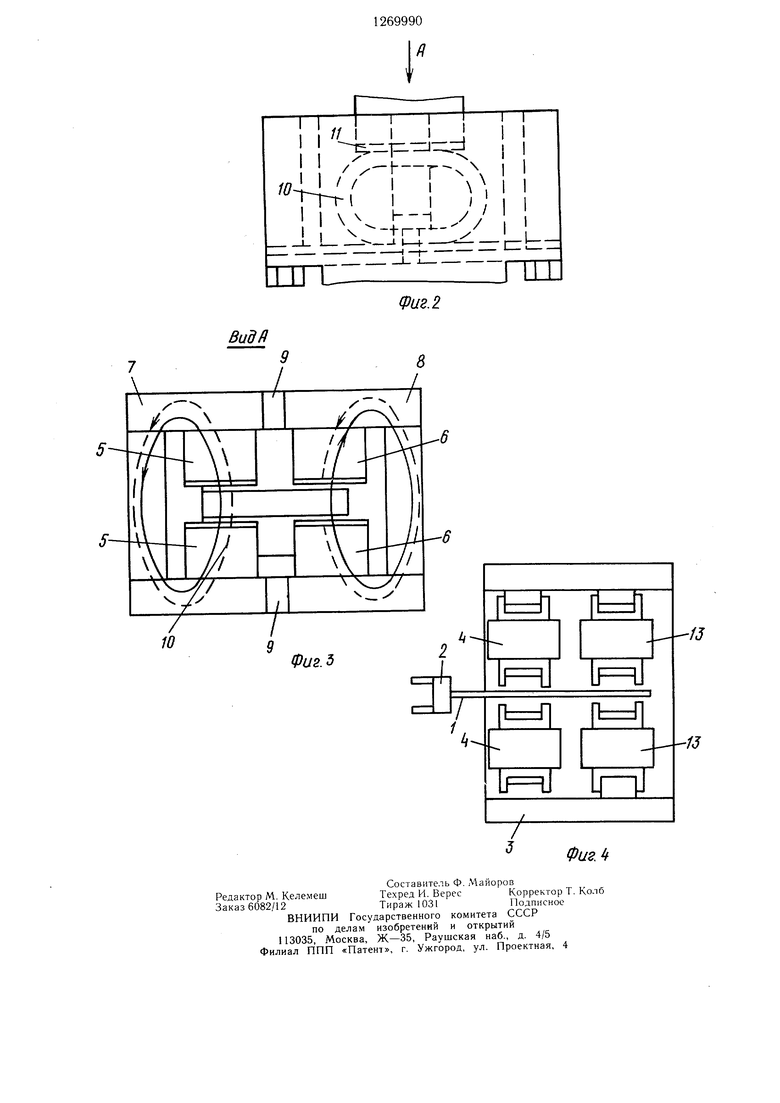
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - электромагнитный двигатель; на фиг. 3 - вид А на фиг. 2; на фиг. 4манипулятор с дополнительным приводом.
Манипулятор содержит руку 1 со схватом 2, корпус 3 и привод, выполненный в виде четырех электромагнитных двигателей 4 расположенных попарно и взаимно перпендикулярно, каждый из которых включает два электромагнита с обмотками 5 и 6 и магнитопроводами 7 и 8, жестко связанными между собой через немагнитопроводную вставку 9, и виток 10, выполненный из электропроводного материала и расположенный между полюсами электромагнитов. Виток 10 выполнен из двух частей и одной своей частью жестко связан с электромагнитами, а другой - с планкой 11. Планка 11 и электромагниты каждого двигателя связаны с корпусом 3 и другой 1 через шарниры 12, ось поворота которых расположена параллельно оси руки 1, а виток 10 расположен в одной плоскости с осью руки 1.
Кроме того, манипулятор может содержать дополнительный привод с электромагнитными двигателями 13 аналогичной конструкции для расширения рабочей зоны манипулятора, расположенный параллельно основному приводу.
Манипулятор работает следующим образом.
Каждый из двигателей 4 может работать в двух режимах:поперечного и продольного перемещений относительно оси руки 1.
В режиме поперечного перемещения обмотки 5 и 6 электромагнитов соединяются так, что их поля направлены согласно, при этом виток 10 оказывается размещенным в поле, силовые магнитные линии которого равномерно пронизывают его в одном направлении (сплощные линии на фиг. 3). В этом случае на виток 10 при протекании по нему тока действуют силы, стремящиеся увеличить площадь витка во всех направлениях. Так как концы витка 10 закреплены, а исходное его положение - сжатое, то электромеханические усилия стремятся придать витку 10 форму окружности, т.е. распрямить первоначальный овал. В двигателе, расположенном напротив, в витке 10 направление тока относительно магнитных силовых линий обратно, и виток 10 сжимается. В итоге рука получает в точке крепления соответствующих шарниров 12 поперечное перемещение в направлении деформации витков 10. Для изменения направления перемещения на противоположное необходимо изменить направление тока в витке 10 или в обмотках 5 и 6 электромагнитов.
В режиме продольного перемещения обмотки 5 и 6 электромагнитов включаются встречно. Плоскость витка 10 пронизывает поле, направление которого на каждой из его боковых сторон противоположно (пунктирные линии на фиг. 3). Это вызывает перемещение сторон витка в продольном направлении, так как усилия, действующие на виток 10, направлены в поперечном направлении и уравновешиваются усилиями, действующими на виток 10, противоположно установленного двигателя 4.
Обслуживание рабочей зоны в сферической системе координат обеспечивается за счет использования дополнительного привода, установленного параллельно основному. В этом случае двигатели одного из приводов работают в режиме поперечного перемещения, а другого - в режиме продольного перемещения.
Формула изобретения
1.Манипулятор, содержащий установленную в корпусе руку со схватом и привод ее перемещения, отличающийся тем, что, с целью упрощения конструкции, привод выполнен в виде четырех электромагнитных двигателей, расположенных попарно и взаимно перпендикулярно, каждый из которых включает два жестко связанных между собой электромагнита, полюса каждого из которых расположены один против другого, планку и виток, выполненный из токопроводного материала и расположенный между полюсами электромагнитов, причем виток одной своей частью жестко связан с электромагнитами, а другой диаметрально противоположной частью - с планкой, при этом планка и электромагниты каждого двигателя связаны с корпусом и рукой манипулято ра с возможностью поворота вокруг осей, параллельных продольной оси руки манипулятора, а каждый виток расположен в одной плоскости с осью руки манипулятора.
2.Манипулятор по п. 1, отличающийся тем, что он снабжен дополнительным приводом, расположенным параллельно основному приводу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1323363A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Манипулятор | 1987 |
|
SU1445941A1 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2586895C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2358372C1 |
| Электромагнитное захватное устройство манипулятора | 1988 |
|
SU1641611A1 |
| Манипулятор | 1986 |
|
SU1530433A1 |
Изобретение относится к электромеханическим манипуляторам промышленных роботов, преимуш,ественно работаюших в сферических координатах. Целью изобретения является упрощение конструкции манипулятора за счет выполнения его привода без П к использования механических передач. Манипулятор содержит установленную в корпусе 3 руку I со схватом 2 и привод перемещения руки 1 в поперечном и продольном относительно оси руки направлениях. Привод включает четыре электромагнитных двигателя 4, расположенных попарно и взаимно перпендикулярно. Каждый двигатель 4 состоит из двух электромагнитов, полюса каждого из которых расположены один против другого, и витка, установленного между этими полюсами. Перемещение руки происходит при взаимодействии витка, по которому протекает ток с полями электромагнитов, направление которых в зависимости от требуемого направления перемещения может изменяться. I з. п. ф-лы, 4 ил. Р / d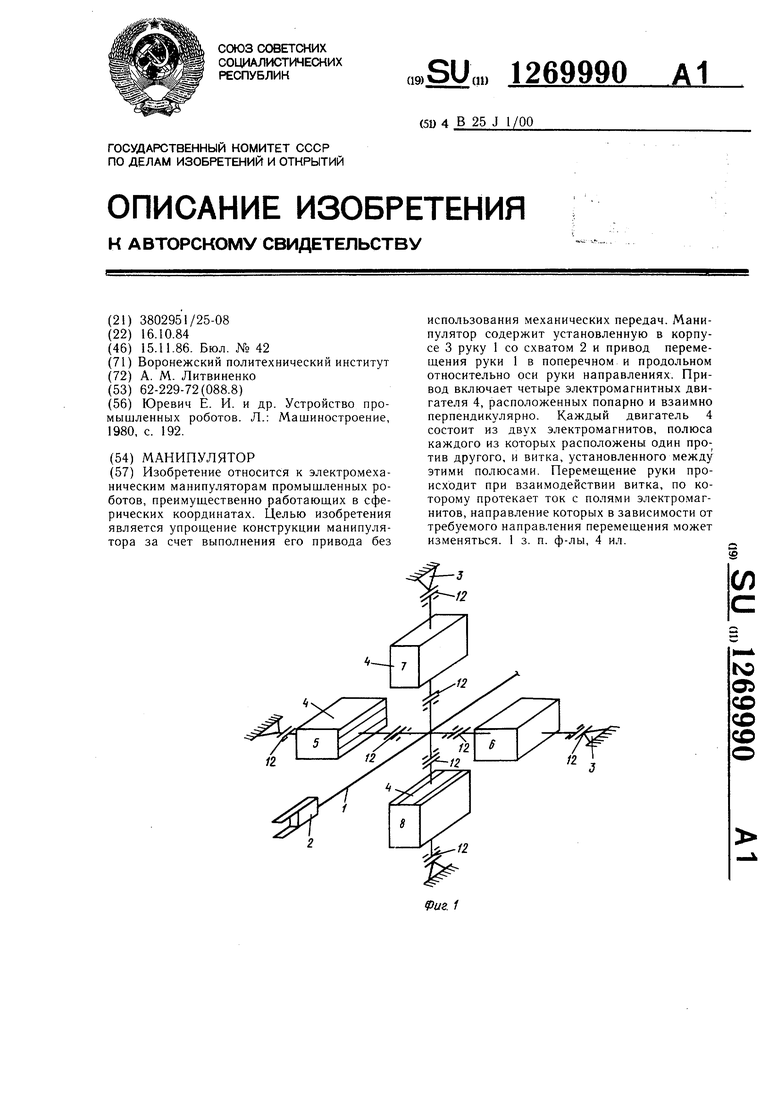
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л.: Машиностроение, 1980, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
