Изобретение относится к робототехнике, а более конкретно к электромеханическим манипуляторам промышленных роботов преимущественно с внешними магнитными системами.
Известный робот содержит внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим воздушным зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее - со звеньями робота, имеется привод поворота основания, рука со схватом, цилиндрический кольцевой зазор образован полюсными наконечниками.
Недостатком прототипа являются низкие функциональные возможности, относительно низкая надежность, обусловленная малой жесткостью кинематической цепи.
Целью изобретения является расширение функциональных возможностей, повышение надежности,
Это достигается тем, что привод захвата выполнен в виде кулачка, а выдвижные губки захвата закреплены на симметричных полурамах в центральном подшипнике, полурамы снабжены толкателями, установленными в зоне кулачка, и замыкающей пружиной.
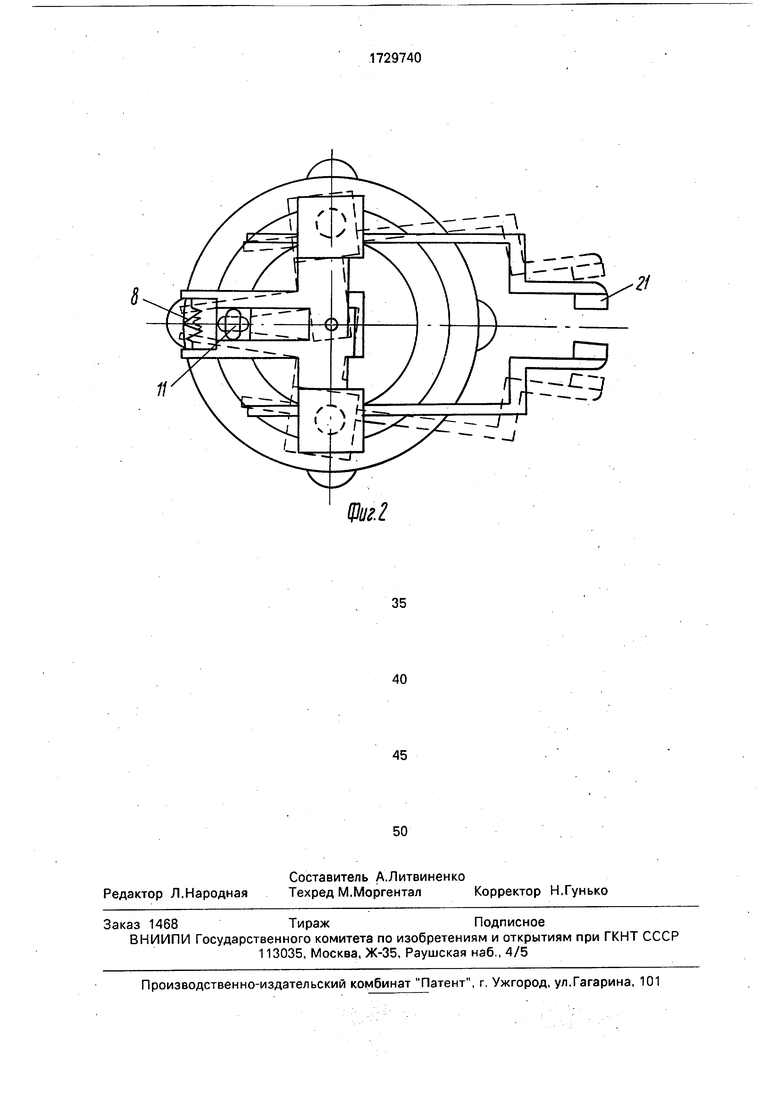
На фиг.1 показан схематично робот, разрез в вертикальной диаметральной плоскости; на фиг.2 - то же, план.
Промышленный робот имеет основание 1, на котором укреплены сердечники 2 с катушками 3 и верхними внешними полюсными наконечниками 4. В кольцевом воздушном зазоре 5 размещены кронштейны якорей, которые закреплены на платформе 6, имеются толкатели 7, которые притянуты один к другому пружиной 8. Привод захвата 9 имеет вал 10, на котором закреплен кулачок 11, толкатели укреплены на угловых рычагах 12, на каждой из которых имеется привод 13 выдвижения рук 14. Полура1иы и платформа установлены в центральном подшипнике 15, который расположен на выходном штоке привода 16 подъема, имеется и привод 17 поворота. В кольцевом воздушЁ
XI
ю о
х|
4 О
ном зазоре, образованном полюсными наконечниками 18, расположены якори 19 приводов 13, закрепленные в кронштейнах 20, на руках 14укреплены накладки губок21 схвата.
Устройство работает следующим образом.
Подъем и поворот рук осуществляется приводами 16 и 17, выдвижение - с помощью приводов 13, кулачок 11 привода 9 обеспечивает срабатывание схвата, перемещение якоря 19 происходит в кольцевом зазоре 5 при повороте и подъеме руки.
При работе устройства происходит захват объекта манипулирования губками 21 и перемещение его в пространстве, сам захват осуществляется следующим образом, при вращении вала 10 привода 9 и, следовательно, кулачка 11 он, действуя на толкатели рычагов 12, приводит к изменению положения рычагов 12 и губок 21, т.е. к разжатию или сжатию губок схвата, рычаги 12 при этом подпружинены пружиной 8. Работа привода 9, установленного на платформе 6. и приводов 13 возможна в любом угловом положении руки, поскольку якори 19 в кронштейнах 29 перемещаются в кольцевом зазоре 5.
Губки 21 могут быть установлены и на внешней стороне рук-реек 14 и захватывать детали изнутри.
В любом случае рычаги 12 поворачиваются друг относительно друга, что позволяет захватывать детали различных размеров.
Формула изобретения Промышленный робот, содержащий платформу с приводами ее поворота и подъема, руку со схватом, состоящую из двух частей, каждая из которых снабжена механизмом ее выдвижения и связана с соответствующей губкой схвата, а также магнитную систему с кольцевым воздушным зазором, в котором расположены якори электродвигатели приводов выдвижения руки, отличающийся тем, что, с целью повышения надежности захвата, он снабжен двумя угловыми рычагами, установленными с возможностью их качания вокруг оси, совпадающей с осью поворота платформы, кулачком с приводом его поворота, имеющим электродвигатель, якорь которого установлен на платформе и расположен в воздушном зазоре магнитной системы, при этом на одних концах рычагов закреплены приводы выдвижения соответствующих частей руки, а другие концы рычагов упруго связаны между собой и расположены с возможностью взаимодействия с поверхностью кулачка.

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Промышленный робот | 1990 |
|
SU1705064A2 |
Изобретение относится к робототехнике, а более конкретно к электромеханическим манипуляторам промышленных роботов преимущественно с внешними магнитными системами. Целью изобретения является повышение надежности захвата. Подъем и поворот двух рук, одновременно связанных с соответствующими губками схвата, осуществляется приводами 16 и 17, а их выдвижение - приводами 13. Относительное перемещение губок схвата происходит при повороте кулачка 11, связанного с приводом 9, якорь 19 которого расположен в кольцевом воздушном зазоре магнитной системы и перемещается вместе с платформой 6. 2 ил.
/J
Я 11
и/
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
