Изобретение относится к области робототехники, а более конкретно, к электромеханическим манипуляторам промышленных роботов преимущественно с внешними магнитными системами.
Приводы роботов с внешними магнитными системами описаны, например в [1], а также в [2].
Наиболее близким по технической сущности является промышленный робот [3].
Робот содержит внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее со звеньями робота. Имеется поворотное основание (колонна с приводом поворота), рука со cхватом, цилиндрический кольцевой зазор образован полюсными наконечниками, имеется также привод поворота плеча, на плече установлен блок приводов поворота локтя, поворота cхвата, ротации схвата.
Недостатком прототипа являются низкие функциональные возможности, относительно низкая надежность, обусловленные малой маневренностью кинематической цепи и низким коэфециентом сервиса.
Изобретение направлено на расширение функциональных возможностей, повышение надежности.
Это достигается тем, что робот снабжен дополнительным приводом вращательного действия, выходное звено дополнительного привода установлено соосно с осью вращения блока приводов, на выходном звене закреплен рычаг, на конце которого размещена магнитная система с зазором, причем якори двигателей блока приводов установлены с возможностью размещения в воздушном зазоре магнитной системы при позиционировании.
Технический результат - облегчение приводов робота (кроме привода поворота) - достигается за счет введения дополнительного звена.
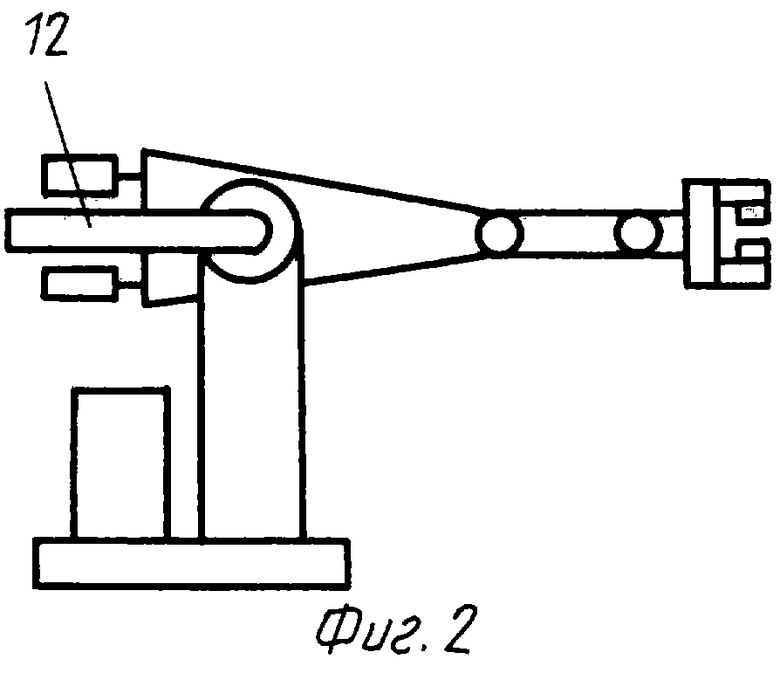
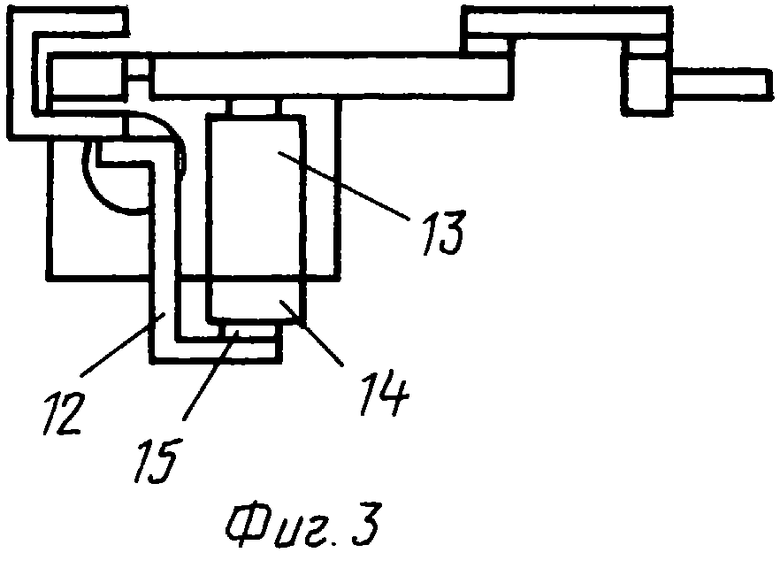
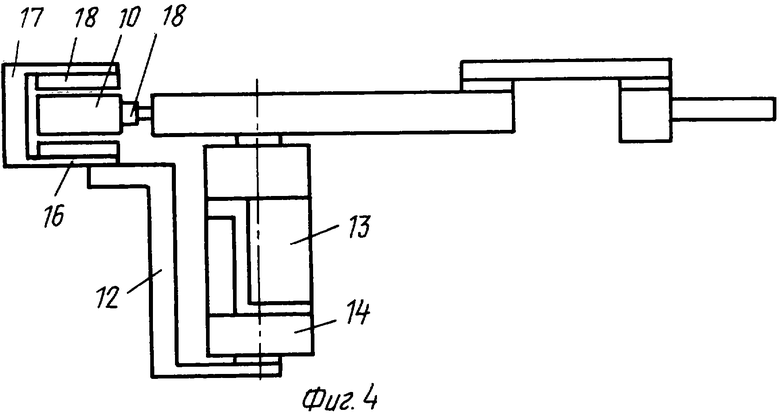
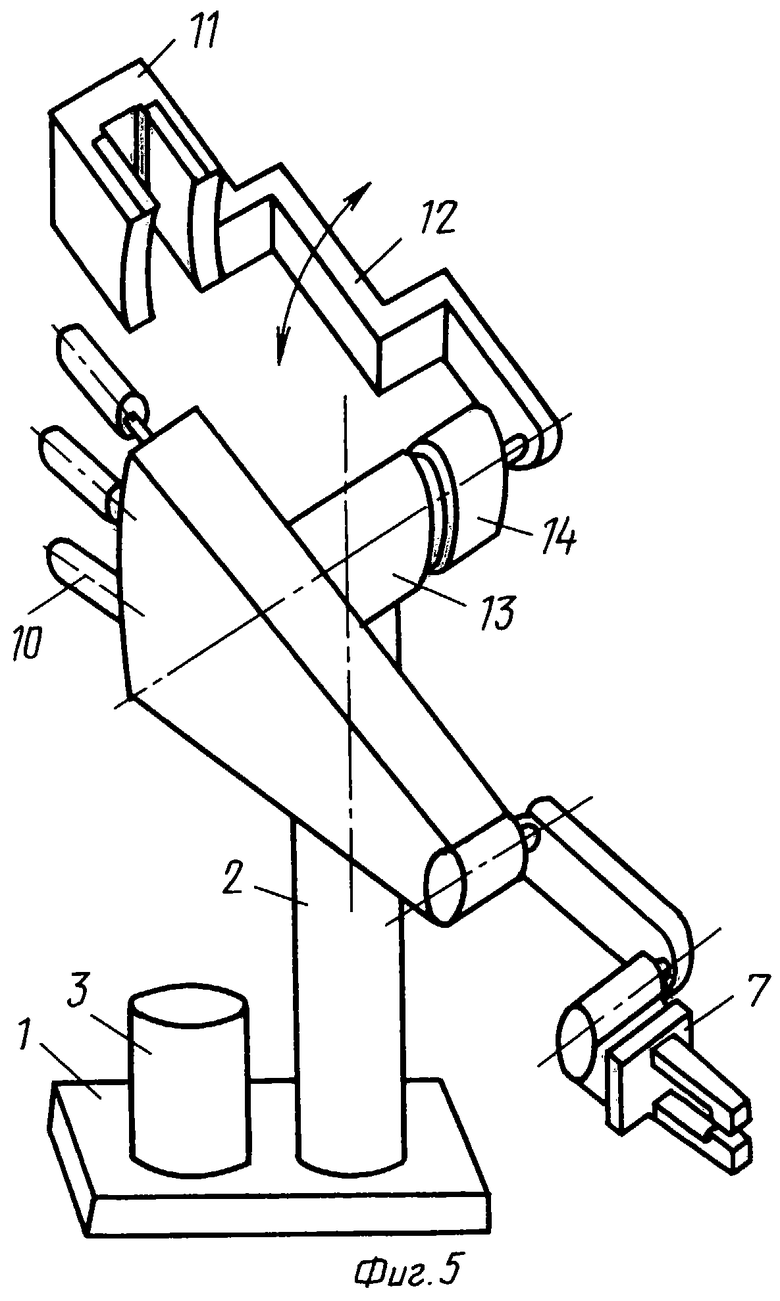
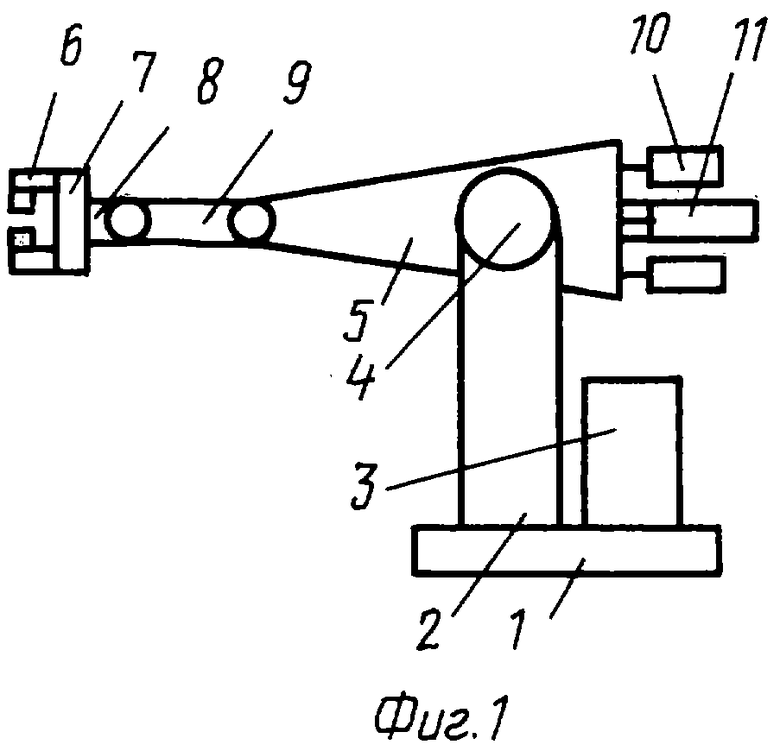
Сущность изобретения иллюстрируется чертежами, где на фиг.1 показан схематично робот, вид в вертикальной плоскости, слева; на фиг.2 - вид справа; на фиг.3 - вид сверху; на фиг.4 - вид сверху в увеличенном масштабе; на фиг.5 - пространственная кинематическая схема.
Робот состоит из основания 1, колонны 2, поворачиваемой приводом 3, поворотного узла 4, в оси которого поворачивается блок приводов 5, имеется схват 6, привод ротации 7, привод поворота cхвата 8, локоть 9. Блок 5 снабжен приводами, якори 10 двигателей которых расположены на стороне блока, противоположной схвату. Один из якорей /средний на фиг.1/ охвачен магнитной системой 11, которая размещена на рычаге 12. Блок приводов имеет привод поворота 13. На одной оси с его выходным звеном размещен привод 14 - дополнительный. На его оси 15 укреплен рычаг 12, магнитная система и магнитопроводы 16, ярмо и источники магнитного поля, например, постоянные магниты 18 /ярмо 17/.
Работа устройства. Поскольку конструктивное исполнение приводов поворота колонны и привода поворота блока приводов не претерпевает изменений, то есть остается таким же, как, например, у робота пума, то работа приводов, укрепленных на блоке 5, имеет лишь ту особенность, что динамические нагрузки существенно уменьшаются вследствие переноса массы магнитных систем якорей 10 на подвижное основание - рычаг 12. Привод 14 перемещает рычаг 12 с магнитной системой 11 по дуге относительно оси поворота блока 5, то есть параллельно перемещению якорей 10 блока 5. В воздушном зазоре магнитной системы при определенном угле поворота рычага 12 оказывается один из якорей 10 двигателей приводов блока 5. После завершения этого поворота на якорь подается напряжение и привод приводит в движение соответствующую степень подвижности блока 5, например, поворот схвата, ротацию схвата или поворот локтя. Таким образом, одновременно происходит поворот блока 5 и поворот в соответствующее состояние рычага 12 с магнитной системой 11. Далее работает один из приводов блока 5, затем, после очередного перемещения рычага, другой привод блока 5 и так далее.
Что касается увеличения массы привода поворота, то оно компенсируется некоторым увеличением его мощности, что не влияет на динамику робота, поскольку этот привод расположен на неподвижном основании, а не на подвижных звеньях.
При работе устройства происходит захват объекта манипулирования, ротация его, поворот относительно кисти, поворот объекта в вертикальной плоскости относительно локтя и оси поворота блока 5 /плеча/. Также возможен поворот объекта относительно оси колонны. Привод 14 магнитной системы реализует дополнительную степень подвижности, которая, однако не касается объекта, является обслуживающей якори 10 блока приводов 5. Рычаг 12 наклоняется в вертикальной плоскости на требуемый угол. При этом даже при повороте робота, якори 10 не выходят из зазора, образованного полюсами магнитной системы. Насыщение магнитной системы позволяет обеспечивать требуемую степень индукции для якорей привода.
Расположение дополнительного привода 14 по центральной оси - см. чертеж - не влияет на маневренность робота. Все приводы робота снабжены тормозами и позиционной системой управления.
Технико-экономическими преимуществами заявленного устройства являются расширенные функциональные возможности за счет манипулирования с большим быстродействием из-за уменьшения момента инерции привода поворота колонны и привода поворота блока 5 /плеча/. При этом данные преимущества подкреплены сравнительно простым конструктивным решением дополнительной степени подвижности.
Источники информации
1. Литвиненко А.М. - Электропривод схвата робота - Механизация и автоматизация производства, №11, 1985, С.19-20.
2. Литвиненко А.М. - Электроприводы промышленных роботов с внешними магнитными системами /Воронеж, Издательство Воронежского Государственного Университета, 1989, С.161, Ил.
3. А.С. СССР №1342723, Заявка №4076643/33-08 от 20.06.86, -Промышленный робот / А.М.Литвиненко, Опубл. 07.10.87, Б. И. 1987, №37.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| ПРИВОД РОБОТА | 2003 |
|
RU2248269C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
Изобретение относится к области робототехники, а более конкретно к электромеханическим манипуляторам промышленных роботов, преимущественно с внешними магнитными системами. Сущность изобретения заключается в том, что робот снабжен дополнительным приводом вращательного действия. Выходное звено дополнительного привода установлено соосно с осью вращения блока приводов. На выходном звене закреплен рычаг, на конце которого размещена магнитная система с зазором. При этом якори двигателей блока приводов установлены с возможностью размещения в воздушном зазоре магнитной системы при позиционировании. Технический результат изобретения состоит в расширении функциональных возможностей и повышении надежности робота. 5 ил.
Промышленный робот, содержащий поворотное основание, на котором установлена колонна с приводом поворота плеча, на плече установлен блок приводов поворота локтя, поворота схвата и ротации схвата, отличающийся тем, что робот снабжен дополнительным приводом вращательного действия, выходное звено дополнительного привода установлено соосно с осью вращения блока приводов, на выходном звене закреплен рычаг, на конце которого размещена магнитная система с зазором, причем якори двигателей блока приводов установлены с возможностью размещения в воздушном зазоре магнитной системы при позиционировании.
| Промышленный робот | 1986 |
|
SU1342723A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2000 |
|
RU2189899C2 |
| US 4607998 A, 26.08.1986 | |||
| DE 3340946 A, 23.05.1985. | |||

