Изобретение относится к машиностроению и может быть использовано в робототехнике при манипулировании малогабаритными ферромагнитными объектами (деталями) в различных условиях эксплуатации, в том числе взрыво- и пожароопасных средах.
Цель изобретения - повышение усилия захвата за счет существенного уменьшения рабочего воздушного зазора у торцов магнита и повышение надежности устройства за счет упрощения конструкции шунта и управления им.
Для этого используется постоянный магнит стержневого типа, на торцах которого устанавливаются полюсные наконечники, например, в виде пластины квадратной или прямоугольной формы. Один из торцов полюсного наконечника образовывает pai бочую область (зазор), у которой фиксируется объект манипулирования, а у противоположного торца между внутренними поверхностями полюсных наконечников, вблизи поверхности магнита и параллельно его оси, устанавливается подпружиненный экранирующий шунт, изготовленный в виде перемычки - бруса из магкитопроводящего материала с немагнитными тонкими накладками на его концах и выполненный с возможностью в последующем, под воздействием привода, перемещаться перпендикулярно оси магнита в область магнитно отдаленную от расположения постоянного магнита.
Предложенное исполнение и расположение шунта дает возможность при необходимости обеспечения захвата деталей с формой поверхности, отличающейся от плоскости, установить на открытой стороне полюсных наконечников у рабочей области захвата фиксирующие элементы в виде пакетов плоских пластин, адаптивных к поверхности захвата.
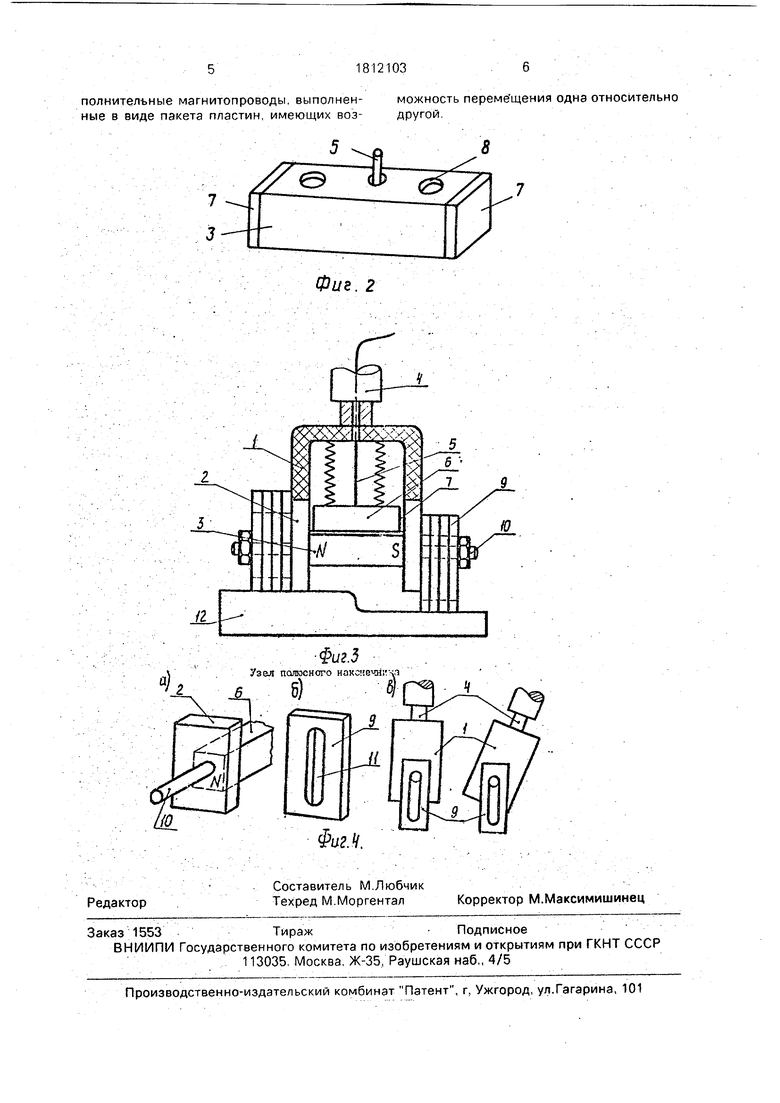
На фиг.1 приведен эскиз схвата с рабо- .чим зазором у торцов полюсных наконечников: на фиг.2 - экранирующий шунт; на фиг.З - эскиз схвата с фиксирующими пакетами пластин у рабочего зазора; на фиг.4 - узел полюсного наконечника с осью крепления пластин, форма пластины фиксирующего пакета и возможное отклонение руки робота.
Магнитный схват (фиг.1) состоит из немагнитного корпуса 1, на котором укреплены полюсные наконечники 2 стержневого постоянного магнита 3. Корпус связан с рукой робота 4, на которой установлен привод (на чертеже не показан), тяга от которого в виде троса 5, укреплена на подпружиненном шунте 6, расположенном между наконечниками 2 вне рабочего зазора. На концах шунта 3 (фиг.2) укреплены немагнитные на-, кладки 7, тяга 5 и выполнены пазы 8 под концы пружин. : . ...
При использовании в устройствах захвата (фиг.З) пакетов с фиксирующими пластинами 9 они размещаются на дополни-4 тельных осях (фиг.4,а), укрепленных на полюсных наконечниках 2 с возможностью
O свободного перемещения в пределах продольного паза 11 пластины (фиг.4,6). При этом пластины под действием силы тяжести размещаются в пакетах адаптивно к поверхностям на различных участках объекта ма5 нипулирования 12 (фиг.З).
Положительный эффект данного изобретения заключается в том, что применение постоянного магнита стержневого типа с полюсными наконечниками повышает
0 магнитную связь с адаптивными пластинами, увеличивая эффективность работы всего устройства и повышает надежность захвата детали при объектах, требующих достаточно высокой грузоподъемности.
5 Схват работает следующим образом. Рука робота подводит захват к поверхности детали 12 и фиксирует ее у упора полюса 2, в этот момент магнитная сила устройства недостаточная для удержания детали у тор0 цов полюсных наконечников магнита (фиг,1) или торцов пакета 9 пластин (фиг.З).
При подаче команды на удержание, привод устройства перемещает трос 5, при этом шунт 6, экранирующий магнитный поток,
5 перемещается, отдаляясь от поверхности магнита и магнитный поток становится до- статочным для фиксации детали 12 в зоне рабочего зазора у торцов полюсных наконечников 2 или торцов пакетов пласта 9, .
0 При подаче сигнала на сброс детали пружины шунта возвращают его в исходное положение, когда происходит экранирование потока у рабочей зоны, сила удержания снимается и происходит отпуск детали, при
.5 этом устройство приходит в исходное состояние.
Формула изобретения Магнитный схват, содержащий немагнитный корпус, в котором установлен посто0 янный магнит стержневой формы, при этом на торцах магнита у его полюсов закреплены магнитопроводы, причем на корпусе установлен подпружиненный относительно него магнитный шунт, имеющий возмож5 ность Взаимодействия с магнитол роводами, от л и ч а ю щ и и с я тем; что, с целью повышения надежности работы, магнитный шунт имеет возможность взаимодействия с боковой поверхностью магнита, а со стороны каждого торца магнита установлены до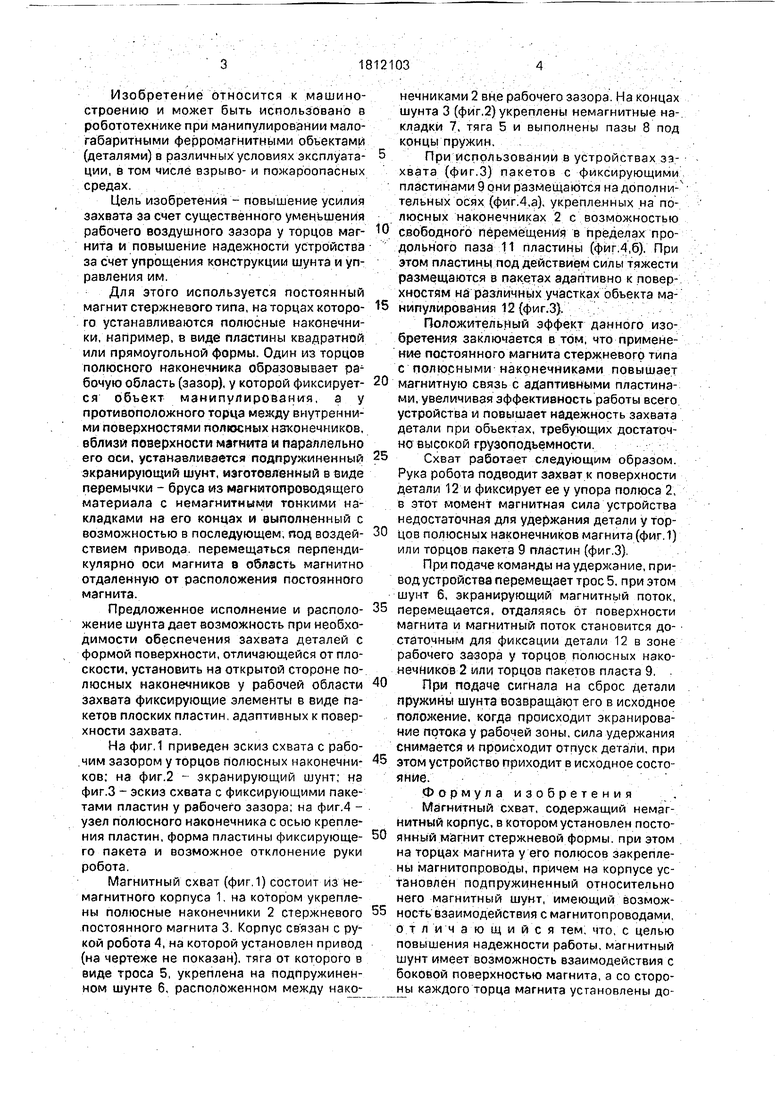
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Схват | 1990 |
|
SU1811477A3 |
Использование: в робототехнике при манипулировании малогабаритными ферро -.: .-. . ; :;.- :; : 2 . .. ... магнитными объектами в различных условиях эксплуатации. Сущность изобретения: магнитный схват состоит из немагнитного корпуса Тс укрепленными на нем полюсными наконечниками 2 стержневого постоянного магнита 3. Между наконечниками вне рабочего зазора расположен подпружиненный шунт 6 с немагнитными накладками На его концах, связанный тягой 5 с рукой робота. Кроме того, на осях, укрепленных на полюсных наконечниках 2, могут дополнительно устанавливаться пакеты с фиксирующими пластинами, которые могут свободно перемещаться в пределах продольного паза пластины. 4 ил,
| Магнитный захват | 1988 |
|
SU1639949A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
