Известны моторные орнитоптеры для проведения экспериментальных исследований по вопросам практического осуществления машущего полета, скомпонованные по самолетной схеме.
Описываемый моторный орнитоптер отличается улучшенными аэродинамическим качеством, управляемостью и устойчивостью. Кроме.того, предлагаемый орнитоптер «меет хорошие маневренные данные -при разбеге и пробеге.
Это достигается тем, что он оборудован системой управления пограничным слоем, аккумуляторами энергии махового колебания и упругого изменения кривизны П|рофиля, а также компенсационным взаимодействующим с машущими крыльями рулем высоты, дистанционно управляемым рычажно-поворотньш механизмом угла установки крыльев, и ведущим от двигателя хвостовым колесоМ шасси.
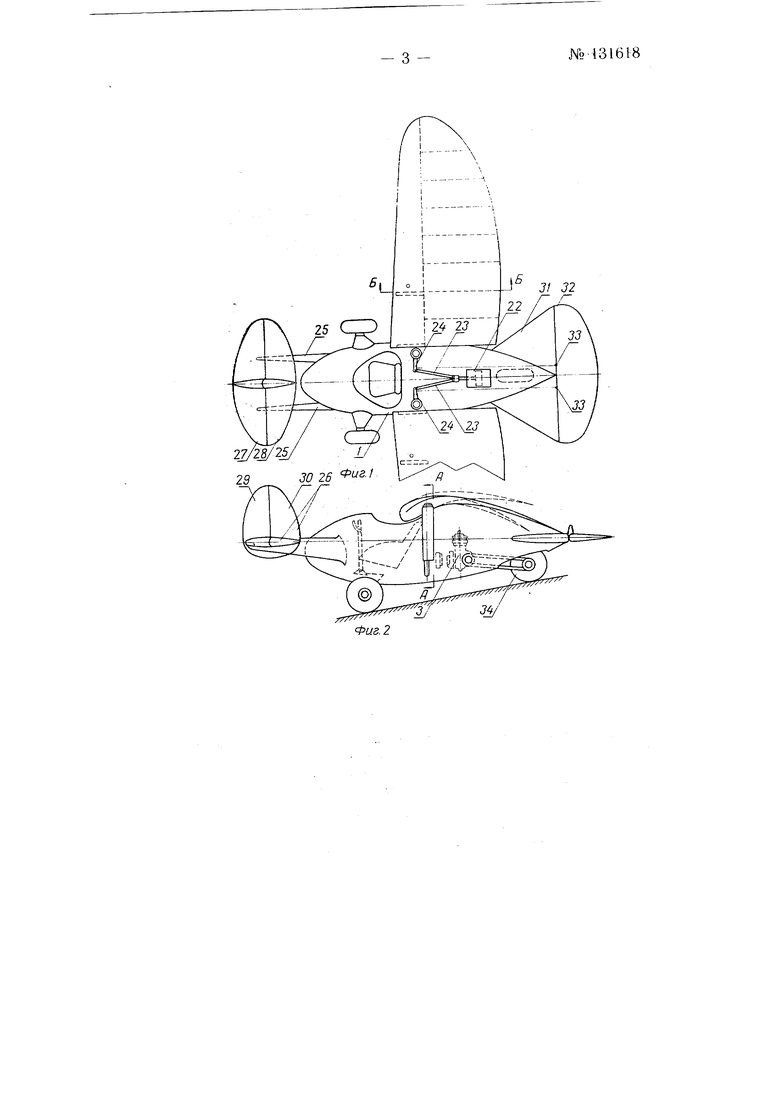
На фиг. 1 схематически изображен описываемый орнитоптер, в плане; «а фиг. 2-то же, вид сбоку; на фиг. 3-то же, вид спереди; на фиг. 4-разрез по А-А на фиг. 2; на фиг. 5-разрез по Б-Б на фиг. 1.
В фюзеляже 1 на вертикальной раме 2 смонтирован с приводом от поршневого мотора 3 кривошипно-шатунный механизм 4, обеспечивающий маховое движение регулируемых однолонжеронных упруго-эластичных с автоматически изменяющейся кривизной профиля крыльев 5.
Средняя труба 6 ра-мы 2 является направляющей муфты 7. Внеш-. ние трубы рамы 2 служат направляюплими для ско.чьзящих муфт 8 с шарнирами 9, к которым крепятся регулируемые подкосы 10, приво-. дящие в движение крылья 5, и для муфт 11с шарниром 12 для Крепления лонжерона 13.
Подкосы 10 верхними концами подсоединены к шарнирам механизма поворота крыльев относительно их продольной оси. Механизм поворота крыльев обеспечивает раздельный поворот крыльев для поперечного управления орнитоптером и включает в себя управляемый
№ 131618- 2 -,
дистанционно тросом 14 рычаг /5, в пазу коюрого скользит труба 16 лонжерона 13 крыла 5.
Между горизонтальной траверсой 17 скользящих муфт 8 и нижней поперечиной 18 основной рамы 2 установлен пружинный или резиновый, аккумулятор 19 мощности, накапливающий неиспользованную мощность мотора в полете при подъеме крыла и отдающий ее механизму привода при очередном махе крыла сверху вниз.
В случае применения составного двухкомпонентного крыла 20 применяется рычажный механизм 21, увеличивающий угловую скорость и амплитуду маха консольной, части крыла. Для ограничения движения крыльев в горизонтальной плоскости и синхронизации этих движений в фюзеляже имеется буферное устройство 22, связанное трубчатыми тягами 23 с кронштейнами 24 на муфтах 8 крыльевых шарниров.
В носовой части фюзеляжа / установлены два горизонтальных кронштейна 25, несущих переднее оперепие 26, состоящее из стабилизатора 27, руля высоты 28, киля 29 и руля поворота 30.
В хвостовой части крыла имеется стабилизатор 31 с компенсационным рулем 32, который посредством кронп1тейнов 24 и 33 связан тросами с Обоими Крыльями , таким образом, что он автоматически восстанавливает при махово-1оризонт1альпом движении крыльев нарушаемое Равновесие.
Трехколесное шасси орнитоптера выполнено с задним ведущим колесом 34 с приводом от мотора.
Описываемый орнитоптер со Всеми 1)егулирубмыми подвижными системами позволяет на практике подбирать наивыгоднейшие параметры аппарата маапунхего полета.
Предмет и 3 обретени я
1. Моторный орнитоптер для проведения экспериментальных исследований вопросов практического осуществления машущего полета, включающий все основные агрегаты такого типа летательного аппарата, скомпонованного по самолетной схеме, отл ич-аю щи и ся тем, что в нем применены: схема компоновки самолета типа «Утка, упругоэластичное крыло, снабженное аккумулятором мощности и устройством для сдувания пограничного слоя струей Сжатого воздуха, шнуровой рейиновый аккумулятор мощности, взаимодействующий с механизмоМ привода машущих крыльев, и монтированное в хвостовой части фюзеляжа дополнительное горизонтальное оперение, имеющее компенсационный, руль высоты, взаимодействующий с машущими крыльями.
2. Моторный орнитоптер по п. 1, отличающийся тем, что для обеспечения дистанционного изменения угла установки крыльев, а также поворота их раздельно относительно их продольной оси в противоположные стороны для осуществления элеронного эффекта он снабжен рычажно-поворотным механизмом.
3.Моторный орнитоптер по пп. 1 и 2, отличающийся тем, что для регулирования амплитуды и скорости махов крыльев, а также ограничения их перемещения в горизонтальной плоскости при совершении махов механизмы привода крыльев и управления ими выполнены регулируемыми.
4.Моторный орнитоптер по п. 1. отличающийся тем, что для облегчения рулежки и разбега на взлете он снабжен ведущим от двигателя хвостовым колесОМ.
3Jt/
Фиг. 5
26
I9
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОВОЙ ДИАФРАГМЕННЫЙ ДВИЖИТЕЛЬ (ЕГО ВАРИАНТЫ) И МАХОВОЙ САМОЛЕТ НА ЕГО ОСНОВЕ | 1996 |
|
RU2123455C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |