Изобретение относится к промышленному транснорту и может быт) использовано для автоматического адресования подвижных объектов в разветвленных транспортных системах.
Цель изобретения - новьинение надежности адресования.
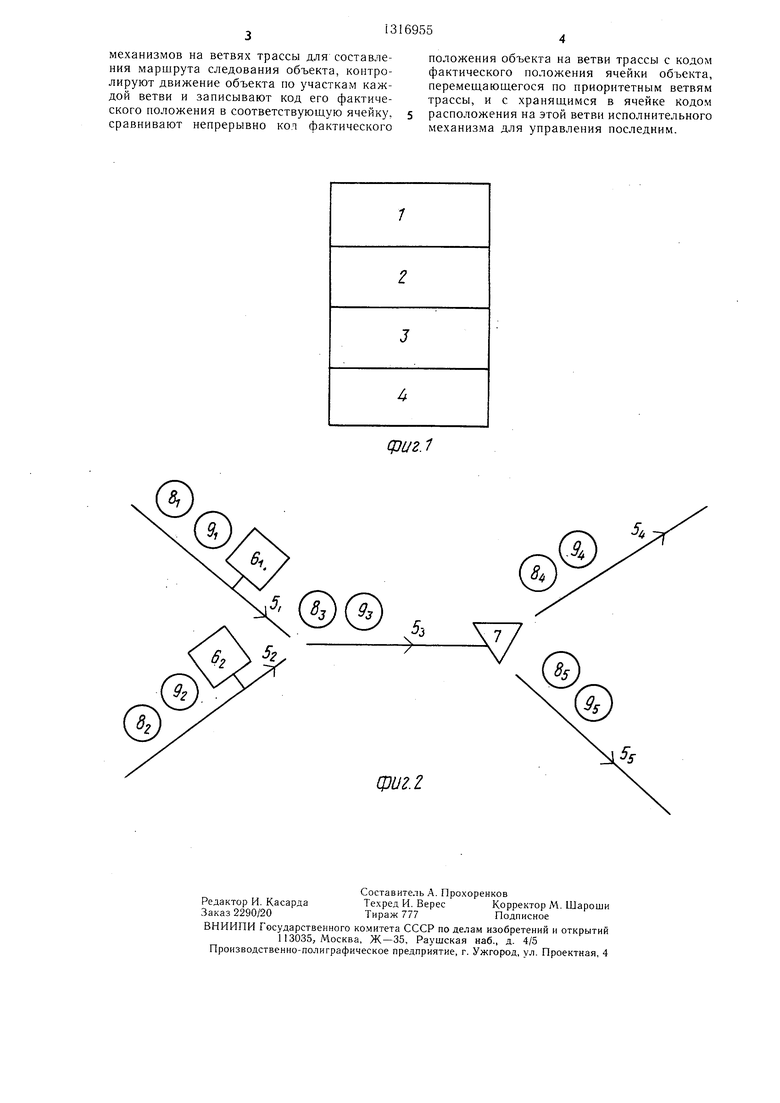
На фиг. 1 показан пример организации ячейки в запоминающем устройстве для каждого подвижного объекта; на фиг. 2 - фрагмент трассы транспортной системы с расстановкой на ней необходимых элементов контроля и управления для реализации способа.
За каждым подвижным объектом закрепляют неизменный номер, определяющий ячейку в запоминаюпяем устройстве, куда заносят код маршрута следования, по ко- торо.му управляют исполнительным .механизмом трассы по достижении его подвижным объектом. В эту же ячейку записывают информацию о местонахождении подвижного объекта на трассе и сравнивают ее с постоянными данными о местонахождении исполнительного механизма для управления им. а на приоритетных ветвях-и с информацией о местонахождении перемещающихся по ним объектов.
Местонахождение как подвижного объекта, так и исполнительного механизма кодируют для разветвленных транспортных систем в виде совокупности двух реквизитов: номер системы отсчета - ветви транспортной системы; номер ординаты нахождения подвижного объекта или исполнительного механизма в пределах данной системы отсчета.
Ячейка намяти для каждого подвижного объекта включает следуюнд,ие разряды; 1 - неизменный номер подвижного объекта; 2 - код маршрута движения объекта, задают дистанционно; 3 - номер ветви транснорт- ной системы, на которой находится подвижной объект; 4 - номер ординаты, измеренной расчетными HjaraMH перемещения, в пределах данной ветви, на которой находится подвижной объект. Фрагмент трассы (фиг. 2} состоит из ветвей 5,...,65, направление движения по которым показано стрелками. Ветви 5i и 52 оборудованы исполнительными механизмами трассы - остановами 6| и ба соответственно, где может производиться остановка движения подвижных объектов и задание маршрутов движения. Ветвь 5з оборудована исполнительным механизмом стрелки 7, распределяюшей.,,подвижные екты в зависимости от кода маршрута на ветви 54 и 55. Каждую из ветвей 5i,...,5r оборудуют датчиками 8i,...,85 линейного перемещения или расчетного, шага следования, а также датчиками 9|,...,9.-, обнаружения подвижного объекта, установленными в начале соответствующей ветви.
Способ реализуется следующим образо.м. Достижение подвижным объектом с известным номером останова 6i сопровождают выявлением в запоминающем устройстве
равенства содержимого разрядов 3 и 4 этого подвижного объекта коду местонахождения останова 6i. Код маршрута для данного подвижного объекта записывают в разряд 2 ячейки, адрес которой хранится в разряде 1. Аналогичные действия выполняют
над подвижным объектом, достигши.м останова 62. После задания кода маршрута соответствующий из остановов 6i, 62 открывают. По сигналу от датчика 8| или 82 значения разрядов 4 для подвижных объектов, пребывающих на ветви 5i и 52, увеличи- вают на единицу. Вход подвижного объекта на ветвь 5з контролируют по сигналу от датчик 9;i. При этом анализируют, какой из подвий ных объектов в пределах ветвей 5 и 52, обладающий максимальным
Q содержимым разряда 4, наиболее близок к ординате начала ветви 5з, после чего для выбранного подвижного объекта в разряд 3 заносят код ветви 5з, а в разряд 4 - код начальной ординаты этой ветви. По команде датчика 8з содержимое разрядов 4
5 всех подвижных объектов, пребывающих на ветви 5з, увеличивают на единицу. Подвижной объект из числа указанных, с максимальным значением разряда 4 проверяют на достижение им стрелки 7. В этом случае ((к./рмируют команду управления стрел0 кой 7 по коду маршрута, записанному в разряде 2. Для данного подвижного объекта, проследовавщего перо стрелки 7, сигналам от датчика 9 или 95 (в зависи.мости от выбранного .маршрута) .меняют содержимое разряда 3 с кода ветви 5 на код ветви 5.
или 55, а в разряд 4 ячейки данного подвижного объекта записывают код начальной ординаты соответствующей ветви. Дальнейшее отслеживание liepeMeuiennH подвижных объектов но ветвям 5.1 н 55 аналогично нриве0 денному для ветви 5з.
Формула изобретения
Способ автоматического управлени-я дви-. жением объекта в разветвленной транспортной системе, заключающийся в том, что каж5 дому объекту присваивают постоянный номер; закрепляют по этому номеру ячейку в запоминающем устройстве, определяют код маршрута следования объекта и заносят его в соответствующую ячейку, изменяют состояние исполнительного механизма каждой
0 ветви при достижении его объектом согласно маршрута следования, отличающийся тем, что, с целью повышения надежности адресования, разделяют ветви транспортной системы на одинаковые участки, присваивают каждой ветви и ее участкам постоянные номера, кодируют по этим номерам фактическое положение объекта в процессе его движения и положения исполнительных
механизмов на ветвях трассы для составления маршрута следования объекта, контролируют движение объекта по участкам каждой ветви и записывают код его фактического положения в соответствующую ячейку, сравнивают непрерывно кол фактического
положения объекта на ветви трассы с кодом фактического положения ячейки объекта, перемещающегося по приоритетным ветвям трассы, и с хранящимся в ячейке кодом расположения на этой ветви исполнительного механизма для управления последним.
(риг.1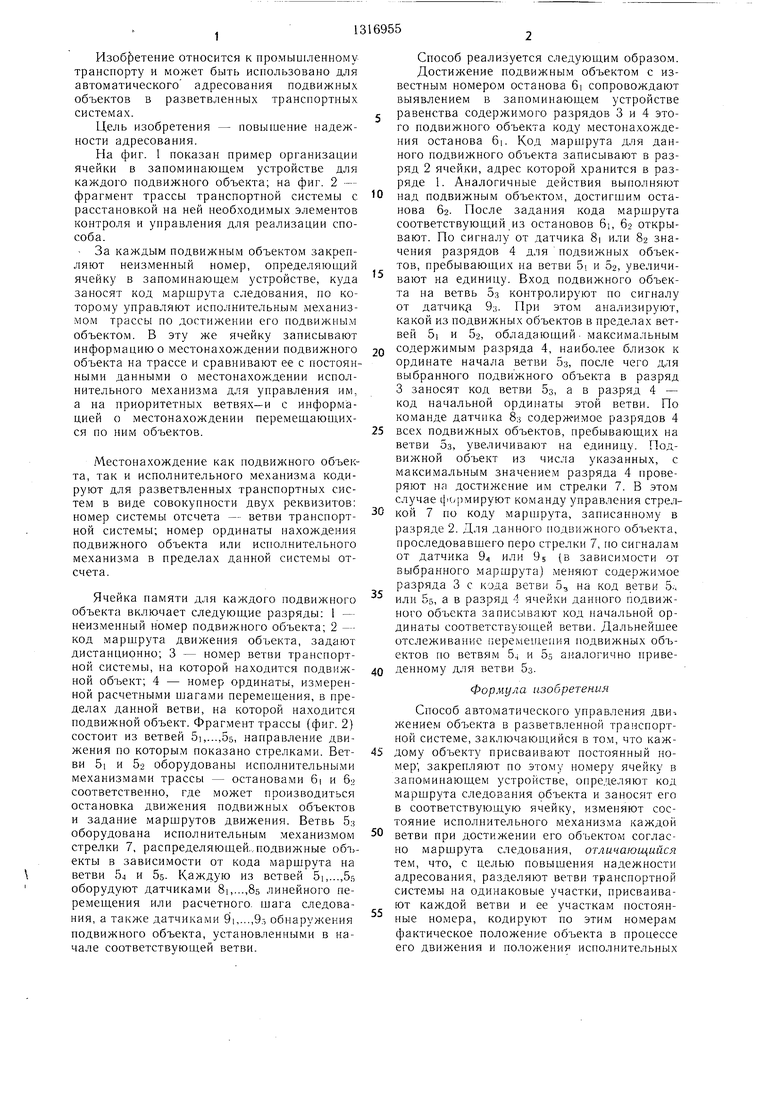
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДРЕСОВАНИЯ | 1995 |
|
RU2100265C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для адресования электрического транспорта | 1976 |
|
SU735516A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ ТРАНСПОРТНЫХСРЕДСТВ | 1971 |
|
SU306067A1 |
| Устройство для управления транспортными средствами | 1987 |
|
SU1437879A1 |
| УСТРОЙСТВО для АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1973 |
|
SU365715A1 |
Изобретение относится к области промышленного транспорта. Цель изобретения- повышение надежности адресования подвижного объекта (ПО). За каждым ПО закрепляют неизменный номер, определяюший ячейку в запоминаюшем устройстве. Заносят в него код маршрута следования, по которому управляют исполнительным механизмом трассы по достижении его ПО. В эту же ячейку записывают информацию о местонахождении ПО на трассе. Эту информацию сравнивают с постоянными данными о местонахождении исполнительного механизма для управления им, а на приоритетных ветвях - с информацией о местонахождении перемещаюплихся по ним ПО. Местонахождение ПО и исполнительного механизма кодируют для разветвленных транспортных систем в виде совокупности двух реквизитов: номер системы отсчета - ветви транспортной системы, номер ординаты нахождения ПО или исполнительного механизма в пределах данной системы отсчета. 2 ил. У5 оо «msi. О5 СО ел ел
| СПОСОБ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ; ТРАНСПОРТНЬГХ СРЕДСТВ:.. . .Л..,. /. ;Е^г!5ЛИО7ьКА | 0 |
|
SU302295A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ ТРАНСПОРТНЫХСРЕДСТВ | 0 |
|
SU306067A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
