Правый
Фиг.1
Изобретение относится к автомати и вычислительной технике и может не пользоваться для адресования транс- портньпс средств, движущихся по разветвленной трассе.
Цель изобрете1-шя расширение области применения за счет управления по разветвленной трассе.
На фиг,1 представлена схема устройства; на фиг.2 вариант топологии трассы.
Устройство содержит блок I ввода программS блок 2 памяти номера позиции, сумматоры 3, блок 4 включения привода, элемент И 5, элемент датчик 7 останова, датчик 8 левого ветвления, датчик 9 правого ветвления, блок 10 формирования команд ве
бинаций и выдачу управляющих команд Вперед, Назад и Стоп в блок 4.
Если позиционный номер положения транспортного средства совпадает с позиционным номером адреса, считанного с блока 1, то на всех входах элемента И 5 фbp иpyютcя сигналы, соответствующие логической 1. Эта
комбинация сигналов фиксируется элементом И 5 5 сигнал с его выхода подается на вход элемента И 15 и при наличии сигнала с датчика 7 останова элемент И 15 выдает сигнал в
блок 4.
Если позиционный номер положения больше позиционного номера, полученного из блока 1, то происходит переполнение сумматора, что обнаруживает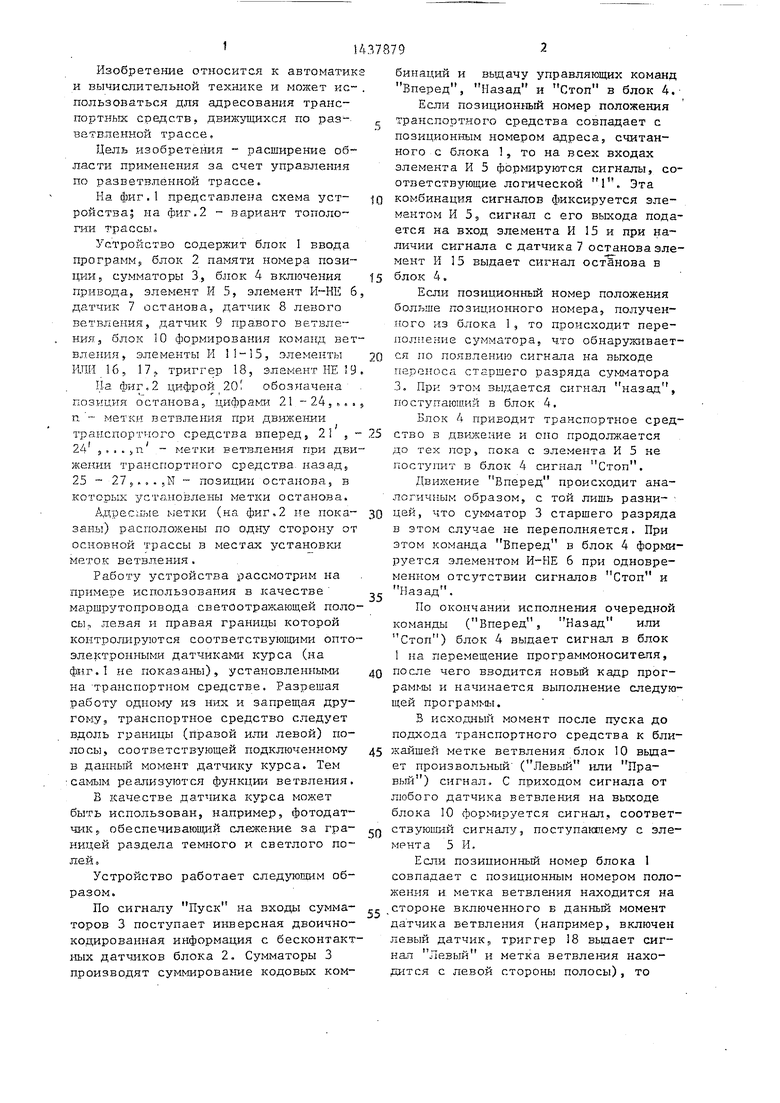
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1977 |
|
SU690500A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1164849A1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| УСТРОЙСТВО ДШ УПР^СРБЩСтеАМИТРАНСПОРТНЫМИ | 1971 |
|
SU433493A1 |
Изобретение относится к автоматике и вычислительной и может использоваться для адресования TpancnopTHfjtx средств, движущихся по разветвленной трассе. Целью изобретения является расширение области применения за счет управления по разветвленной трассе. Устройство содержит блок 1 ввода программ, блок 2 памяти номера позиции, сумматоры 3, блок 4 включения привода, элемент И 5, элемент И-НЕ 6, датчик 7 останова, датчик 8 левого ветвления, датчик 9 правого ветвления, блок 10 формирования команд ветвления, элементы И 11-15, элементы ИЛИ 16, 17, триггер 18, эле-§ мент НЕ 19. 2 ил. (Л
вления, элементы И 11-15, элементы 20 - о появлению сигнала на выходе ИЯН 16, 17 триггер 18, элемент НЕ 19, переноса старшего разряда сумматора
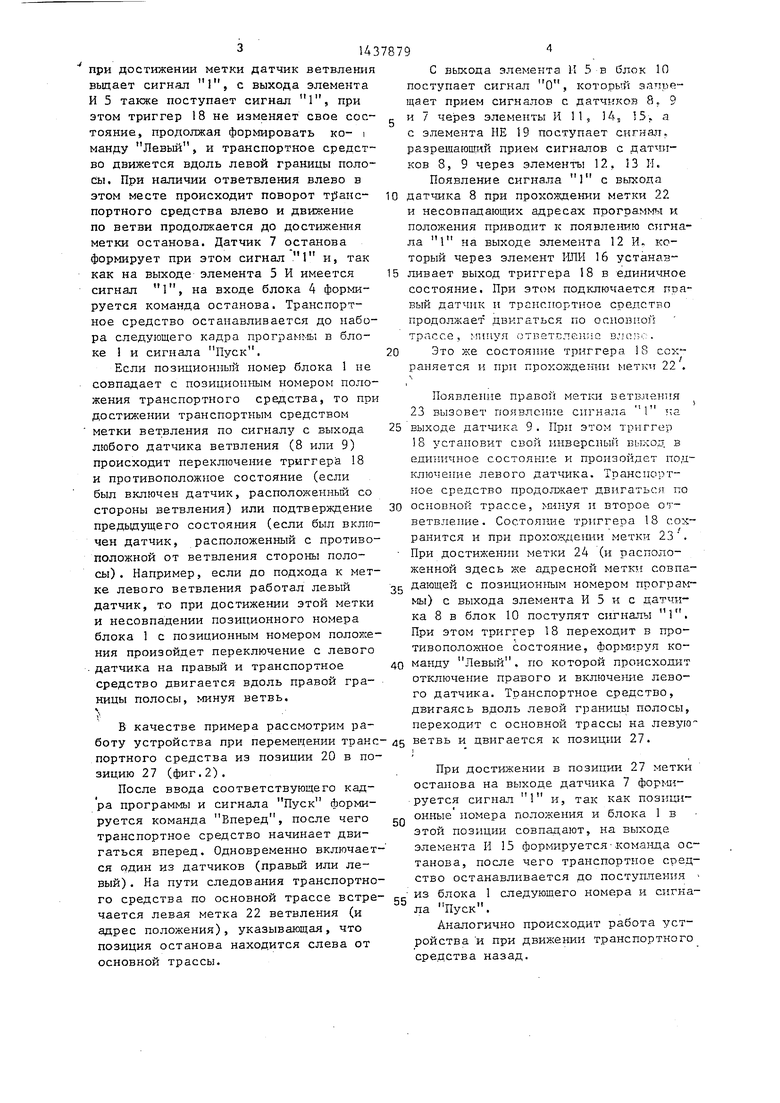
На фиг.2 цифрой 201 обозначена . позиция останова, цифpa ш 21 - 24 , , . , п - метки ветвления при движении
3, При этом выдается сигнал назад поступаюший в блок 4.
Блок 4 приводит транспортное сред
транспортного средства вперед, 2 /
24,
, - 25 ство в двшкение и оно продолжается
- метки ветвления при двидо тех пор, пока с элемента И 5 не женин транспортного средства, назад, поступит в блок 4 сигнал Стоп. 25 - 27„...sN - позиции останова, в Движение Вперед происходит ана- которых установлены метки останова. логичным образом, с той лишь разни- Адрес;1ые (на фиг,2 ие пока- ЗО , что сумматор 3 старшего разряда
в этом случае не переполняется, При этом команда Вперед в блок 4 формируется элементом И-НЕ б при одноврезан.ы) расположены по одну сторону от основной трассы в местах установки меток ветвления.
Работу устройства рассмотрим на примере использования в качестве маошрутопровода светоотражающей полосы, левая и правая границы которой
КОНТрОЛРфуЮТСЯ соответствующими ОПТО
электронными датчикам:- курса (на фиг.1 не показаны), установленными на транспортном средстве. Разрешая работу одноьту из них и запрещая другому, транспортное средство следует вдоль границы (правой или левой) полосы, соответствующей подключенному в данный момент датчику курса. Тем :самым реализуются функции ветвления,
В качестве датчика курса может быть использован, например, фотодат35
менном отсутствии сигналов Стоп и Назад.
По окончании исполнения очередной команды (Вперед, Назад или Стоп) блок 4 выдает сигнал в блок 1 на перемещение программоноситепя,
40 после чего вводится новый кадр программы и начинается выполнение следующей программ).
В исходный момент после пуска до подхода транспортного средства к бли45 жайшей метке ветвления блок 10 вьща- ет произвольный (Левый или Правый) сигнал, С приходом сигнала от любого датчика ветвления на выходе блока 10 формируется сигнал, соответчик,, oбecпeчивaющIiй слежение за гра- Q ствуюший сигналу, поступакиему с эле- ницей раздела темного и. светлого полей.
Устройство работает следующим образом.
По сигналу Пуск на входы сумматоров 3 поступает инверсная двоично- кодированная информация с бесконтактных датчиков блока 2, Сумматоры 3 производят суммирование кодовых ком55
мента 5 И,
Если позипионный номер блока 1 совпадает с позиционнь м номером положения и метка ветвления находится на стороне включенного в данный момент датчика ветвления (например, включен левый датчик, триггер 18 сиг- нап Левый и метка ветвления находится с левой стороны полосы), то
3, При этом выдается сигнал назад, поступаюший в блок 4.
Блок 4 приводит транспортное сред
менном отсутствии сигналов Стоп и Назад.
По окончании исполнения очередной команды (Вперед, Назад или Стоп) блок 4 выдает сигнал в блок 1 на перемещение программоноситепя,
после чего вводится новый кадр программы и начинается выполнение следующей программ).
В исходный момент после пуска до подхода транспортного средства к ближайшей метке ветвления блок 10 вьща- ет произвольный (Левый или Правый) сигнал, С приходом сигнала от любого датчика ветвления на выходе блока 10 формируется сигнал, соответствуюший сигналу, поступакиему с эле-
мента 5 И,
Если позипионный номер блока 1 совпадает с позиционнь м номером положения и метка ветвления находится на стороне включенного в данный момент датчика ветвления (например, включен левый датчик, триггер 18 сиг- нап Левый и метка ветвления находится с левой стороны полосы), то
при достижении метки датчик ветвления выдает сигнал 1, с выхода элемента И 5 также поступает сигнал 1, при этом триггер 18 не изменяет свое состояние, продолжая формировать ко- i манду Левый, и транспортное средство движется вдоль левой границы полосы. При наличии ответвления влево в этом месте происходит поворот транспортного средства влево и движение по ветви продолжается до достижения метки останова. Датчик 7 останова формирует при этом сигнал 1 и, так как на выходе элемента 5 И имеется сигнал 1, на входе блока 4 формируется команда останова. Транспортное средство останавливается до набора следующего кадра программы в блоке и сигнала Пуск.
Если позиционный номер блока 1 не совпадает с позиционным номером положения транспортного средства, то при достижении транспортным средством метки ветвления по сигналу с выхода любого датчика ветвления (8 или 9) происходит переключение триггера 18 и противоположное состояние (если был включен датчик, расположенный со стороны ветвления) или подтверждение предыдущего состояния (если был включен датчик, расположенный с противоположной от ветвления стороны полосы) . Например, если до подхода к метке левого ветвления работал левый датчик, то при достижении этой метки и несовпадении позиционного номера блока 1 с позиционным номером положения произойдет переключение с левого . датчика на правый и транспортное средство двигается вдоль правой границы полосы, минуя ветвь.
В качестве примера рассмотрим работу устройства при перемещении тран портного средства из позиции 20 в позицию 27 (фиг.2).
После ввода соответствующего кадра программы и сигнала Пуск формируется команда Вперед, после чего транспортное средство начинает двигаться вперед. Одновременно включаеся один из датчиков (правый или левый) . На пути следования транспортнго средства по основной трассе встрчается левая метка 22 ветвления (и адрес положения), указывающая, что позиция останова находится слева от основной трассы.
С выхода элемента И 5 в блок 10 поступает сигнал О, который запрещает прием сигналов с датчиков 8,, 9
и 7 через элементы И 11, 14з IS. а с элемента НЕ 19 поступает сигнал, разрешающий прием сигналов с ков 8, 9 через элементы 1.. 3 И. Появление сигнала 1 с выхода
датчика 8 при прохожденр и метки 22 и несовпадающих адресах программы и положения приводит к появлению сигнала 1 на выходе элемента 12 И. который через элемент ИЛИ 16 устаназливает выход триггера 18 в единичное состояние. При этом подключается правый датчик и транспортное средство продолжает двигаться по осиовпо трассе, минуя ответслелис вла;:-::.
Это же состояние триггера 18 сох
раняется и при прохолодении меткч 22 .
Появление правой метки ветвлентш 23 вызовет Г1о; влс11ие сигнала 1 ка
выходе датчика 9. При этом триггер 8 установит свой инверсный выход в единичное состояние и произойдет подключение левого датчика. Транспортное средство продолжает двигаться по
основной трассе, и второе ответвление. Состоягше триггера 18 сохранится и при прохождении метки 23. При достижении метки 24 (и расположенной здесь же адресной метки совпадающей с позиционньш номером программы) с выхода элемента И 5 и с датчика 8 в блок 10 поступят сигналы 1. При этом триггер 18 переходит в противоположное состояние, формируя команду Левый, по которой происходит отключение правого и включе1ше левого датчика. Транспортное средство, двигаясь вдоль левой границы полосы, переходит с основной трассы на левую
позиции 27.
ветвь и двигается к
50
45 ветвь и двигается к
55
При достижении в позиции 27 метки останова на выходе датчика 7 формируется сигнал 1 и, так как позиционные номера положения и блока 1 в этой позиции совпадают, на выходе элемента И 15 формируется-команда останова, после чего транспортное средство останавливается до поступления из блока 1 следующего номера и сигнала Пуск.
Аналогично происходит работа устройства и при движении транспортного средства назад.
10
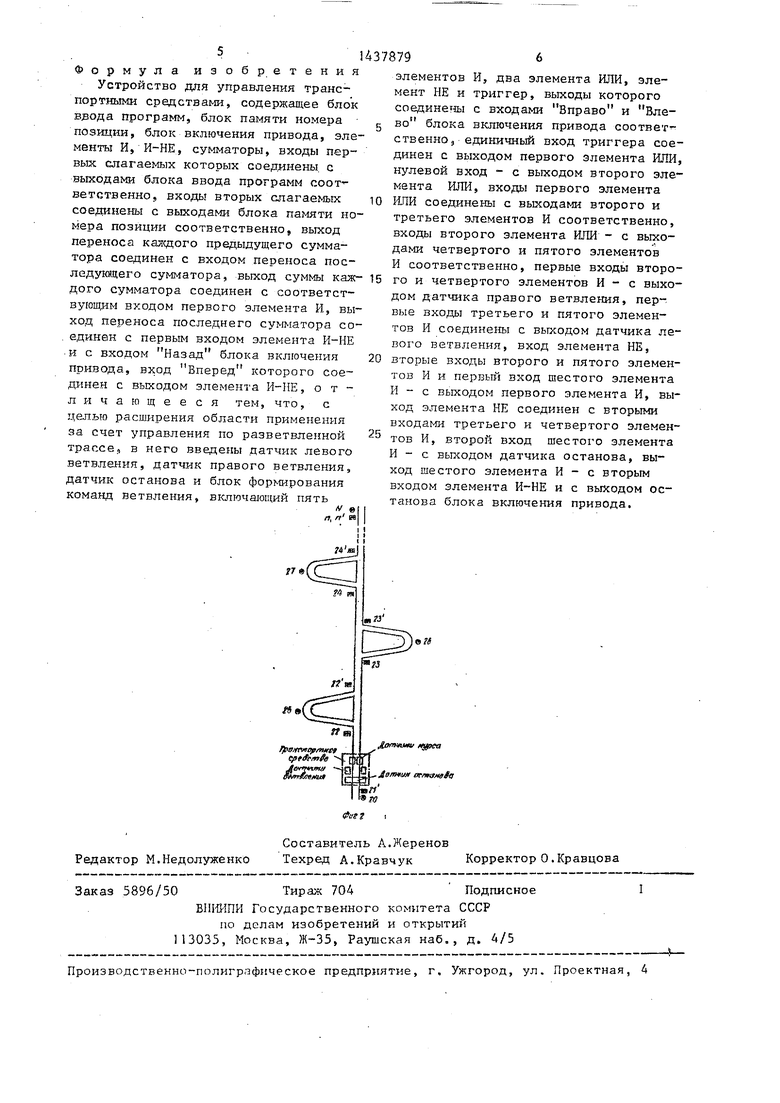
5 Формула изобретения
Устройство для управления транс- портньми средствами, содержащее блок взода программ, блок памяти номера позиции, блок включения привода, элементы И, И-НЕ, сумматоры, входы первых слагаемых которых соединены, с выходами блока ввода программ соот- ветственно, входы вторых слагаемых соединены с выходами блока памяти номера позиции соответственно, выход переноса калсдого предыдущего сумматора соединен с входом переноса пос- ледукяцего сумматора, выход суммы каж- 15 дого сумматора соединен с соответствующим входом первого элемента И, выход переноса последнего сумматора со- единен с первым входом элемента И-ИЕ и с входом Назад блока включения привода, вход Вперед которого соединен с выходом элемента И-НЕ, отичающееся тем, что, с целью расширения области применения за счет управления по разветвленной трассе, в него введены датчик левого ветвления, датчик правого ветвления, атчик останова и блок форЬ Шрования команд ветвления, включающий пять
1437
25
20
fS
,опкаи Mjfffa
r mvtiiffwtt „J.Lx
lyif trrfy im
| Щ /г/ 11« дгужсдаЛг
e//
Я
OV 1
Составитель А.Жеренов Редактор М.Недолуженко Техред А.КравчукКорректор О.JCp ajjIJJBa
„-..-.- - - -.- -«----- - « -- ™ ™ -
Заказ 5896/50Тираж 704 ПодписноеI
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
т ,вв-. ™
-.«.- ---«-- - - - ---.- ------------------- - - - --.
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
10
15
4378796
элементов И, дна элемента ИЛИ, элемент НЕ и триггер, выходы которого соединета с входами Вправо и Влево блока включения привода соответ - сТВеннОэ единичный вход триггера соединен с выходом первого элемента ИЛИ, нулевой вход - с выходом второго элемента ИЛИ, входы первого элемента 11ПИ соединены с выходами второго и третьего элементов И соответственно, входы второго элемента ИЛИ - с выходами четвертого и пятого элементов И соответственно, первые входы второго и четвертого элементов И - с выходом датчика правого ветвления, пер- вые входы третьего и пятого элементов И соединены с выходом датчика левого ветвления, вход элемента НЕ, вторые входы второго и пятого элементов И и первый вход шестого элемента И - с выходом первого элемента И, выход элемента НЕ соединен с вторыми входами третьего и четвертого элемен- 25 тов И, второй вход шестого элемента И - с выходом датчика останова, выход шестого элемента И - с вторым входом элемента И-НЕ и с выходом останова блока включения привода.
20
9fi
,опкаи Mjfffa
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для автоматического адресования грузов | 1985 |
|
SU1270768A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU690500A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
