11
Изобретение относится к машиностроению, а именно к захватным устройствам, используемьм преимущественно в роботах, манипуляторах, а также в других механизмах для погру- зочно-разгрузочных и подъемно-транспортных операций, и является усовершенствованием захвата по авт.ев, № 1229037.
Целью изобретения является расширение технологических возможностей захвата путем обеспечения возможности работы без переоснастки как с хрупкими или деформируемыми изделиями, так и с жесткими, а также с изделиями плоской формы.
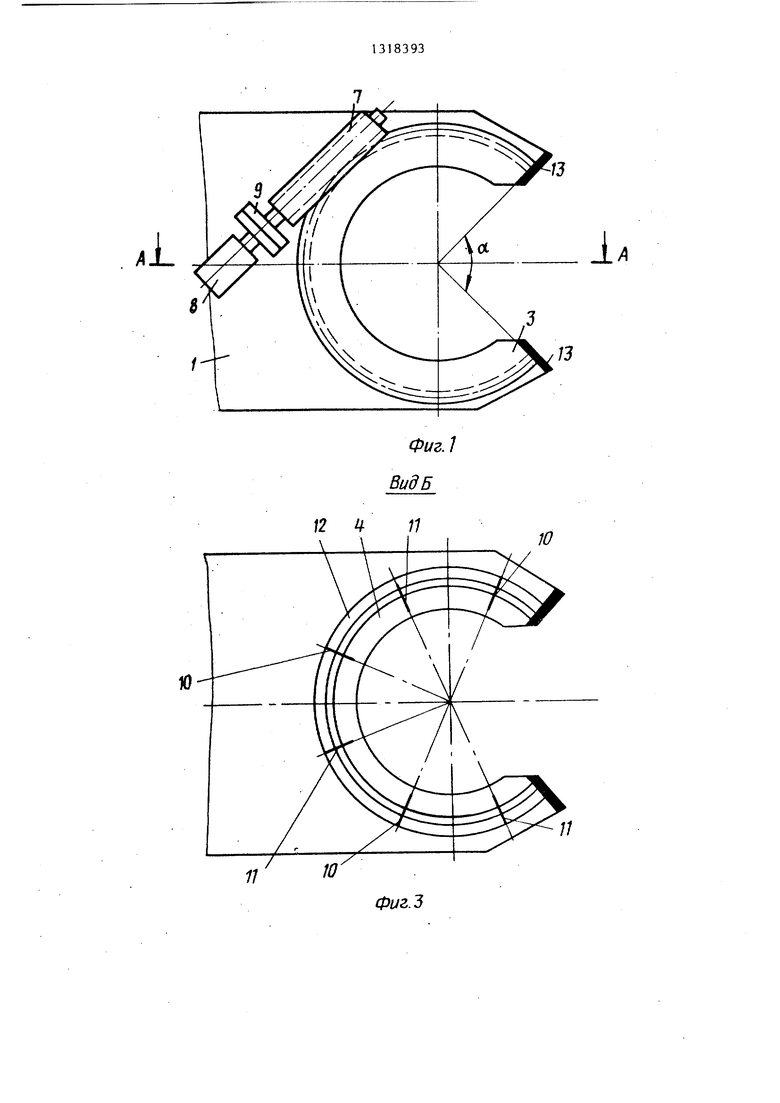
На фиг. изображен захват, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - вид Б на фиг.2; на фиг.4- захват в рабочем положении, общий вид; на фиг.5 - разрез В-В на фиг.4; на фиг.6 - вид Г на фиг.З.
Захват содержит С-образный корпус 1, на котором выполнены криволинейные, например цилиндрические, направляющие 2. На направляющих 2 корпуса 1 с возможностью вращения относительно последнего установлено полукольцо 3, которое с помощью полудиска 4 зафиксировано от перемещения вдоль оси отверстия С-образного корпуса I. Полукольцо 3 имеет ступицу 5 с зубьями 6, входящими в зацепление с зубьями червяка 7 при вода, установленного на С-образном корпусе 1 и выполненного в виде электродвигателя 8, регулируемой муфты 9 предельного момента и червяка 7. На нижней стороне С-образного корпуса 1 в точках, расположенных по окружности корпуса 1 и полукольца 3, установлены, образуя петли, гибкие нерастягивающиеся тросы 10 и эластичные шнуры 11, причем один конец каждо1 1 петли закреплен на полукольце 3 с помощью полудиска А, а другой с помощью полудиска 12 и с возможностью регулировки его длины закреплен на корпусе 1 . Эластич.ные шнуры I1 расположены в промежутках соседними гибкими нерастягиваю щимитросами 10. На корпусе ина полу- кольце 3 установлен чажимные губки 3
Захват работлот следующим образом
С-образный кс рпус 1 -заводят сбоку так, чтобы изде:ите 14 оказалось при
932
близительно в центре корпуса . После этого вращением полукольца 3 при помощи привода захватьгаают изделие 4 по боковой поверхности за счет перекручивания и сближения сначала эластичными шнурами 11, которые короче гибких нерастягивагощихся тросов 10, а затем и нерастягивающимися тросами 0, что имеет место при захвате недеформируемых или жестких изделий, причем изделие автоматически центрируется по оси корпуса 1. Регулировка силы сжатия изделия 14 осуществляется с помощью установки предельного момента на муфте 9. При работе с хрупкими или деформируемыми изделиями на муфте 9 устанавливается такой предельный момент, что захват изделия осуществляется только одними эластичными шнурами 1I. Освобождение изделия 4 после его транспортировки в разгрузочную позицию осуществляется вращением полукольца 3 в исходное
положение, при этом концы С-образного корпуса совпадают с концами полукольца 3, а гибкие нерастягивающиеся тросы 0 и эластичные шнуры 11 провисают в виде петель, освобождая изделие 4. Захват плоских изделий осуществляется так, чтобы оно касалось одной из зажимных губок 13 на корпусе . После этого вращением полукольца 3 при помощи привода с дру- гой стороны изделия подводится губка
3, закрепленная на конце полукольца 3, и зажимают изделие до срабатывания регулируемой муфты 9. Освобождение изделия осуществляется вращением полукольца 3 в исходное положение.
Формула изобретен и я
Захват по авт.св. № 229037, о т- личающийся тем, что, с целью расширения технологических возможностей, он снабжен эластичными шнурами, одни концы которых закреплены на полукольце, а другие - на корпусе между соседними нерастягивающимися тросами, и дополнительными зажимными губками, закрепленными на корпусе и полукольце, при этом эластичные шнуры выполнены с длиной, меньшей длины нерастягивающихся тросов.
Фиг. / ВидБ
Ю
10
7/
Фиг.З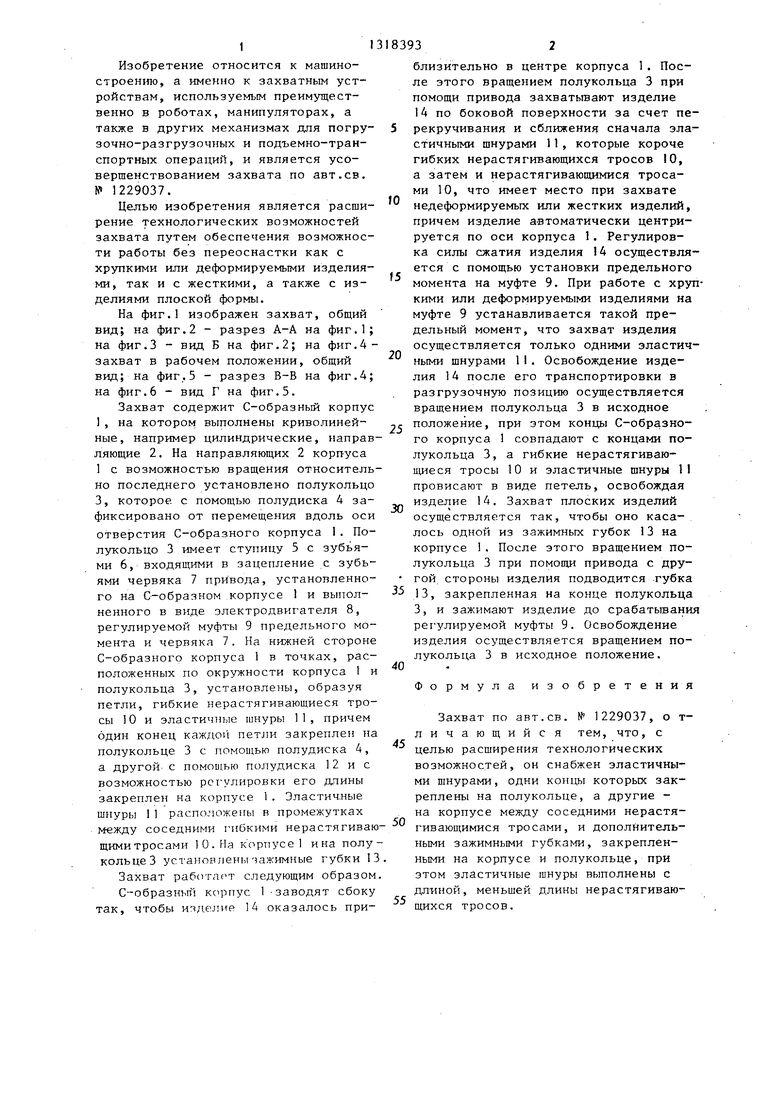
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство Худолеевых | 1984 |
|
SU1229037A1 |
| Захватное устройство | 1984 |
|
SU1442396A1 |
| Захват манипулятора | 1985 |
|
SU1551545A2 |
| Сцепное устройство | 1984 |
|
SU1229078A1 |
| Электромагнитный насос А.К.Худолеева | 1987 |
|
SU1451339A1 |
| Захватное устройство | 1984 |
|
SU1237418A1 |
| ГРАВИТОВОЗ ХУДОЛЕЕВА А.К. | 1994 |
|
RU2106274C1 |
| Подвижной потолок | 1990 |
|
SU1807192A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ ОТРЫВА ЯГОД | 2011 |
|
RU2473060C1 |
| ИНДИВИДУАЛЬНОЕ РЕАКТИВНОЕ УСТРОЙСТВО ТОРМОЖЕНИЯ | 1988 |
|
RU2005659C1 |
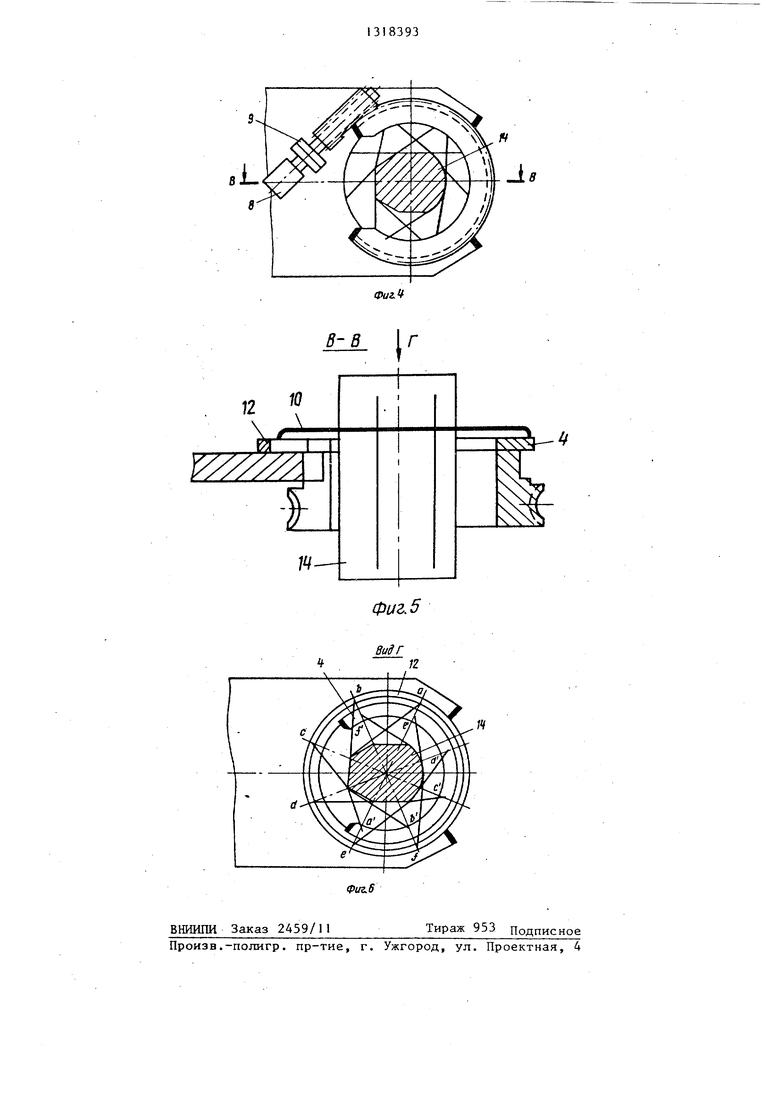
Изобретение относится к области машиностроения, а именно к захват- ньм устройствам, используемым преимущественно в манипул5}торах. Цель изобретения - расширение технологических возможностей за счет обеспечения работы без переоснастки как с хрупкими, так и с жесткими изделиями. Захват содержит С-образный корпус 1, на котором выполнены цилиндрические направляющие 2, в которых размещено полукольцо 3, связанное с приводом. На корпусе 1 равномерно по окружности закреплены одни концы гибких нерастягивающихся тросов 10 и эластичных шнуров 1, другие концы которых закреплены на полукольце 3. При вращении полукольца 3 тросы 10 и шнуры 11 охватывают и зажимают изделие, при этом захват изделия вначале осуществляется эластичными шнурами 11. 6 ил. с А-А (Л А ю ю W СО 00 СО ;о со Фиг. 2 N3
В-В
12
10
г
м.
У77//7У.
ВНИИПИ Заказ 2459/ 11Тираж 953 Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| Захватное устройство Худолеевых | 1984 |
|
SU1229037A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
