Изобретение относится к машиностроению, а именно к захватным устройст™ вам, используемым преимущественно в роботахJ манипуляторах, а также других .механизмах для погрузо-разгрузоч ных и подъемно транспортньгх операций.
Цель изобретения расширение тех™ нологических возможностей устройства и повышение точности и надежности работы путем обеспечения возможности захватывания и центрирования деталей различных типоразмеров, а также дета- лей переменного сечения.
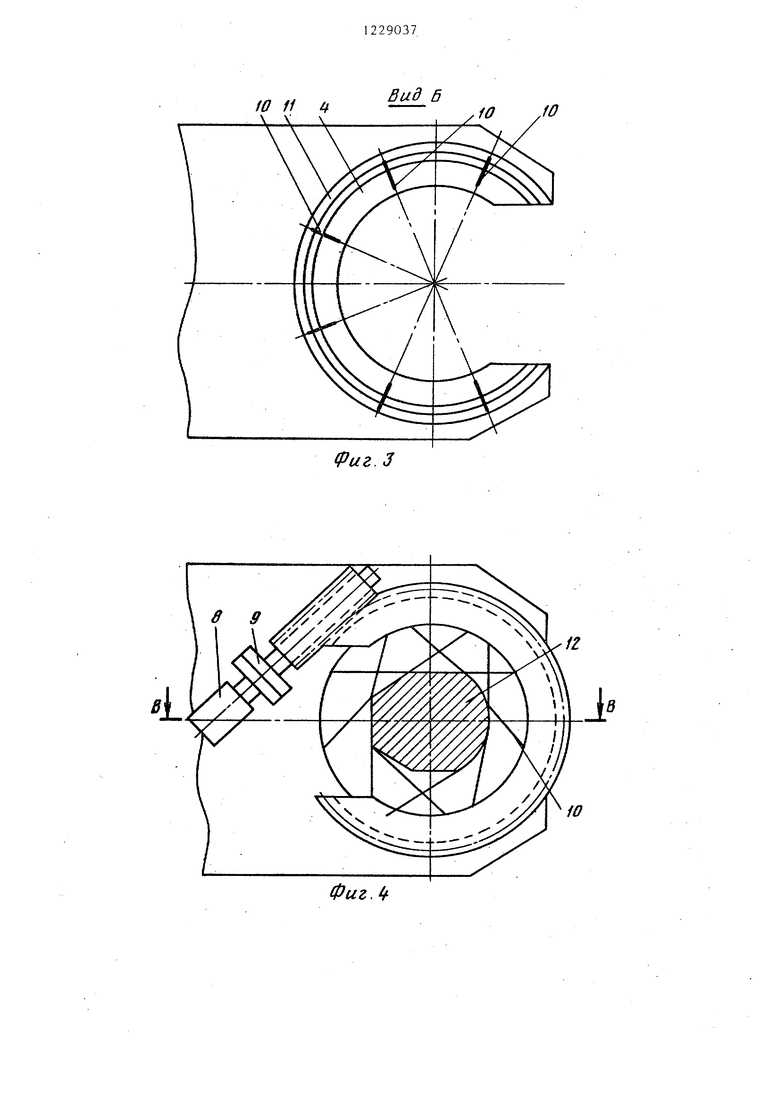
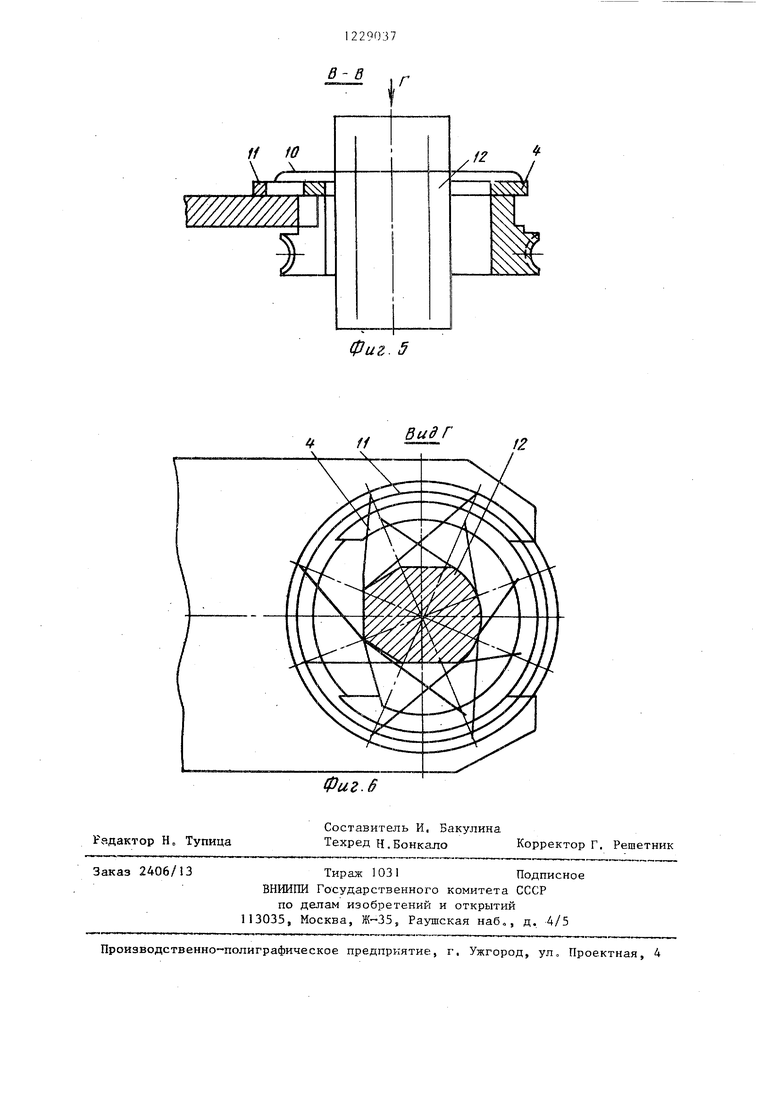
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 раз рез А-А на фиг, 1 ; на фиг,, 3 вид Б на фиг. 2; на фиг. 4- захватное устройство в рабочем положении, общий вид; на фиг-. 5 - разрез В-В на фиг. 4 на фиг. 6 - вид Г на фиг, 5.
Захватное устройство содержит С- образный корпус 1, на котором выполнены криволинейные, например цилинд рические, направляющие 2 На направ- яяющих 2 корпуса 1 с возможностью вращения относительно последнего установ лено полукольцо 3, которое с помощью полудиска 4 зафиксировано от переме- щения вдоль оси отверстия С-образного корпуса 1. На полукольце 3, имеющем ступицу 5, изготовлены зубья 6, входящие в зацепление с зубьями червяка 7 привода, установленного на С-образ- ном корпусе 1 и выполненного в виде электродвигателя 8, регулируемой муфты 9 предельного момента и червяка 7, На нижней стороне С-образного корпуса i в точках, расположенных по окружно-
0
s 20
25 зо
35
сти корпуса 1 и полукольца 3, установлены,, образуя петли, гибкие ные органы 10, причем один конец каждой петли закреплен на полукольце 3 с помощью полудиска 4, а другой конец с помощью полудиска 11 и с возможностью регулировки его длины закреплен на корщ се I,
Гибкие захватные органы 10 могут быть выполнены в виде тросов, а для обеспечения работы с хрупкими изделиями в виде эластичных, например, резиновых шнуров.
Захватное устройство работает следующим образом.
С-образный корпус заводят сбоку так, чтобы изделие 12 оказалось приблизительно в центре корпуса I. После этого вращением полукольца 3 при по мощи привода захватывают изделие 12 по боковой поверхности за счет перекручивания и сближения гибких захватных о)рганов Юд причем изделие J2 ав томатически центрируется по оси корпуса t независимо от размеров его поперечного сечения в плоскости захвата.
Освобождение изделия 12 после его транспортировки в разгрузочную позицию осуществляется вращением полукольца в исходное положениеэ при котором концы С-образного корпуса 1 совпадают с концами полукольца 3, а гибкие захватные органы 0 провисают в виде петель, освобождая изделие 12. Регулировка силы сжатия изделий гибкими захватными органами 10 осуществляется с помощью установки предельного момента на муфте 9.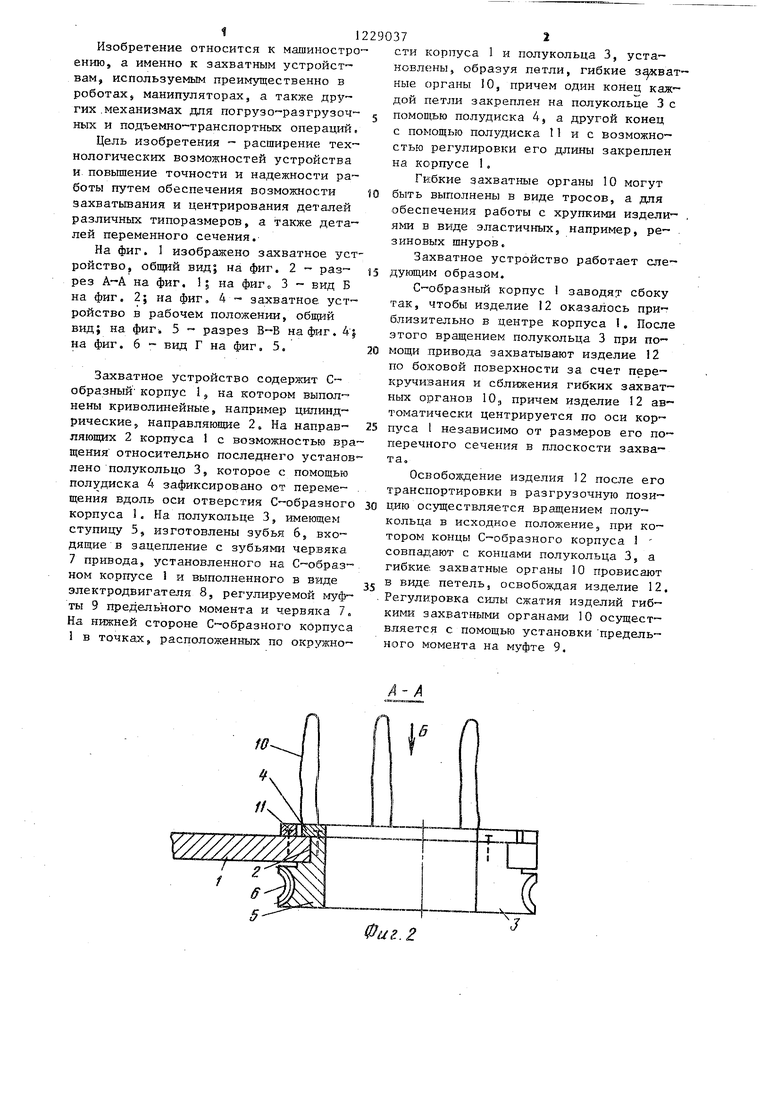
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1984 |
|
SU1318393A2 |
| Захватное устройство | 1984 |
|
SU1442396A1 |
| Грузозахватное устройство А.К.Худолеева | 1972 |
|
SU1034980A1 |
| Сцепное устройство | 1984 |
|
SU1229078A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| Переносной фрезерный станок | 1982 |
|
SU1053981A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| Захватное устройство | 1984 |
|
SU1293019A1 |
| Грузозахватное устройство А.К.Худолеева | 1972 |
|
SU1033418A1 |
Захватное устройство,содержащее С образный корпус с криволинейной направляющей, на которой установлена зажимная губка, выполненная в виде полу кольца и кинематически связанная с i приводом, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения возможности работы с деталями различных типоразмеров, оно снабжено гибкими зажимными элементами, концы которых закреплены в точках, расположенных по ОКР5ГЖНОСТЯМ соответственно корпуса и полукольца с возможностью регулировки их длины. (Л Фиг.1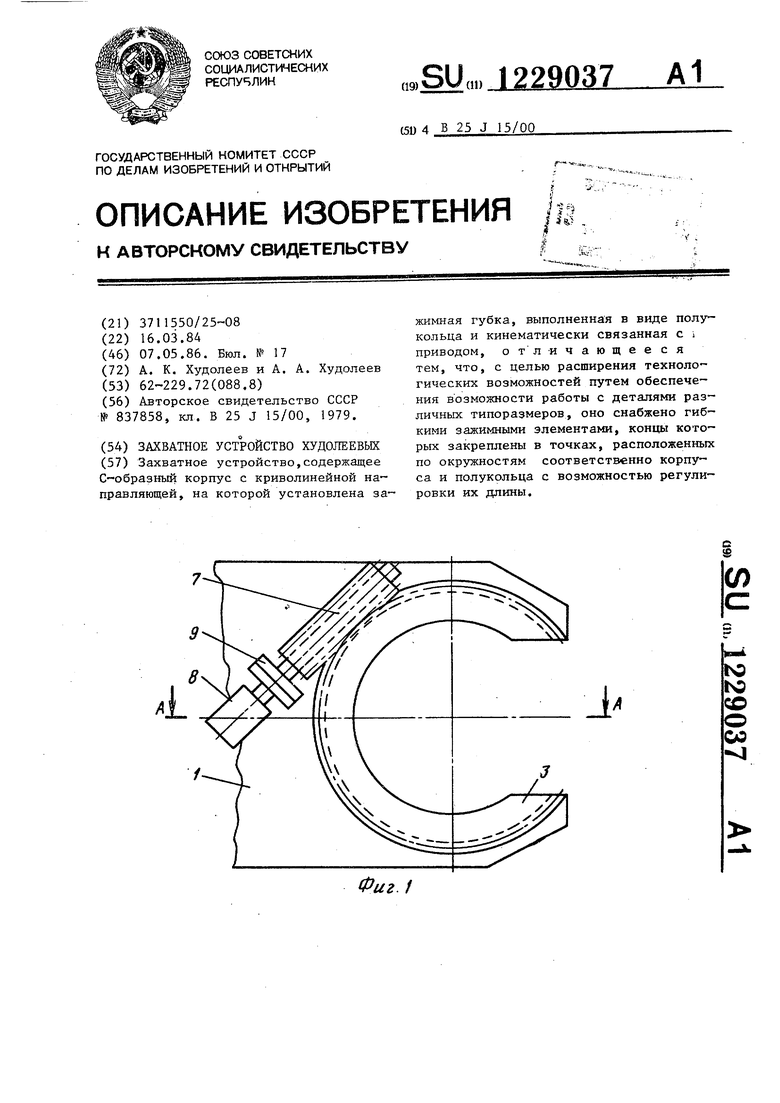
(Уаг. г
W 11 It V
Bud 6
Фиг.З
10
Фиг.
В- В
г
фиг. 5
Фиг. 6
Редактор Н. Тупица
Составитель И, Бакулина
Техред Н.Бонкгшо Корректор Г. Решетник
Заказ 2406/13
Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по дапам изобретений и открытий 113035, Москва, , Раушская наб„, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, уло Проектная 4
| Захват | 1979 |
|
SU837858A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
