Вид Г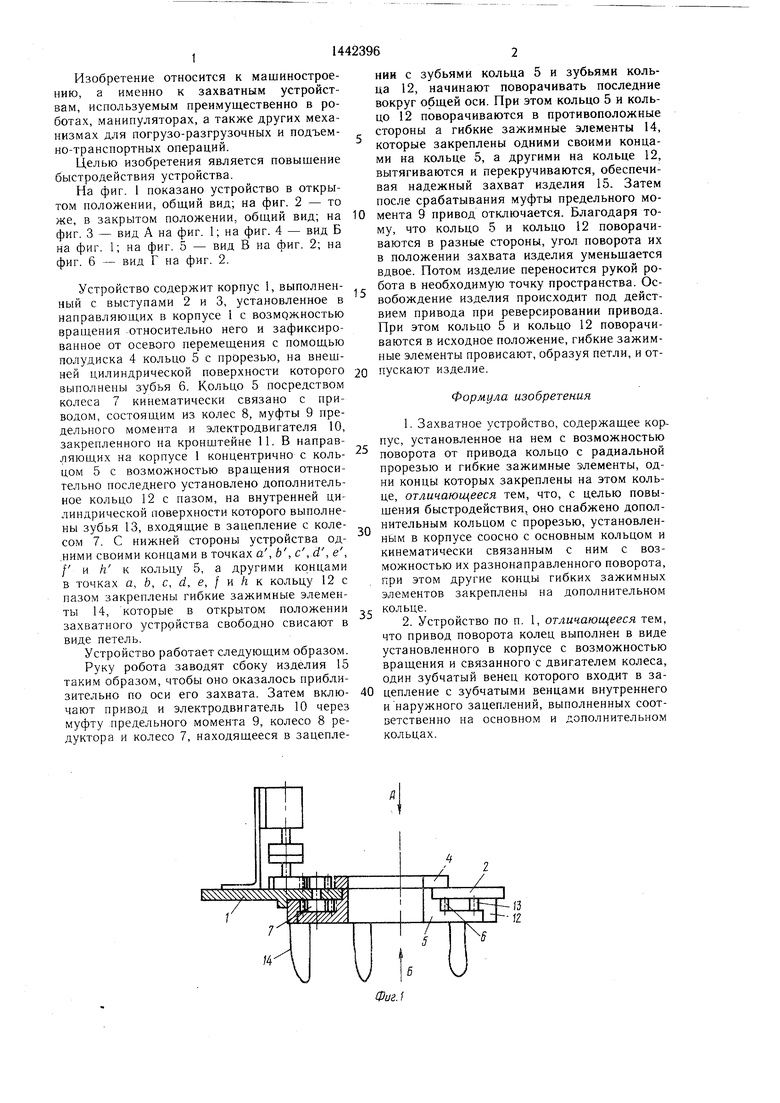
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1984 |
|
SU1318393A2 |
| Захватное устройство Худолеевых | 1984 |
|
SU1229037A1 |
| Емкость Худолеева | 1983 |
|
SU1331740A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захватное устройство | 1985 |
|
SU1268406A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| ЗАХВАТ ДЛЯ АВТОМАТИЗИРОВАННОГО МОНТАЖА КАБЕЛЯ МЕЖДУ ЭЛЕКТРИЧЕСКИМИ КОМПОНЕНТАМИ ЭЛЕКТРИЧЕСКОГО КОММУТАЦИОННОГО УСТРОЙСТВА, СООТВЕТСТВУЮЩИЙ РОБОТ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2778539C1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
Изобретение относится к области ма- шиносгросния. а именно к захватным устройствам, используемым преимущественно в роботах и манипуляторах. Цель изобретения - повышение быстродействия. Для этого в устройстве имеется соосно установленные кольцо 5 и кольцо 12, с которыми связаны концы гибких зажимных элементов 14. При разнонаправленном вращении колец зажимные элементы 14 вытягиваются, охватывая изделие 15, зажимают ci o м,пи провисают, освобождая изаелие. з,п.ф-лы, 6 ил.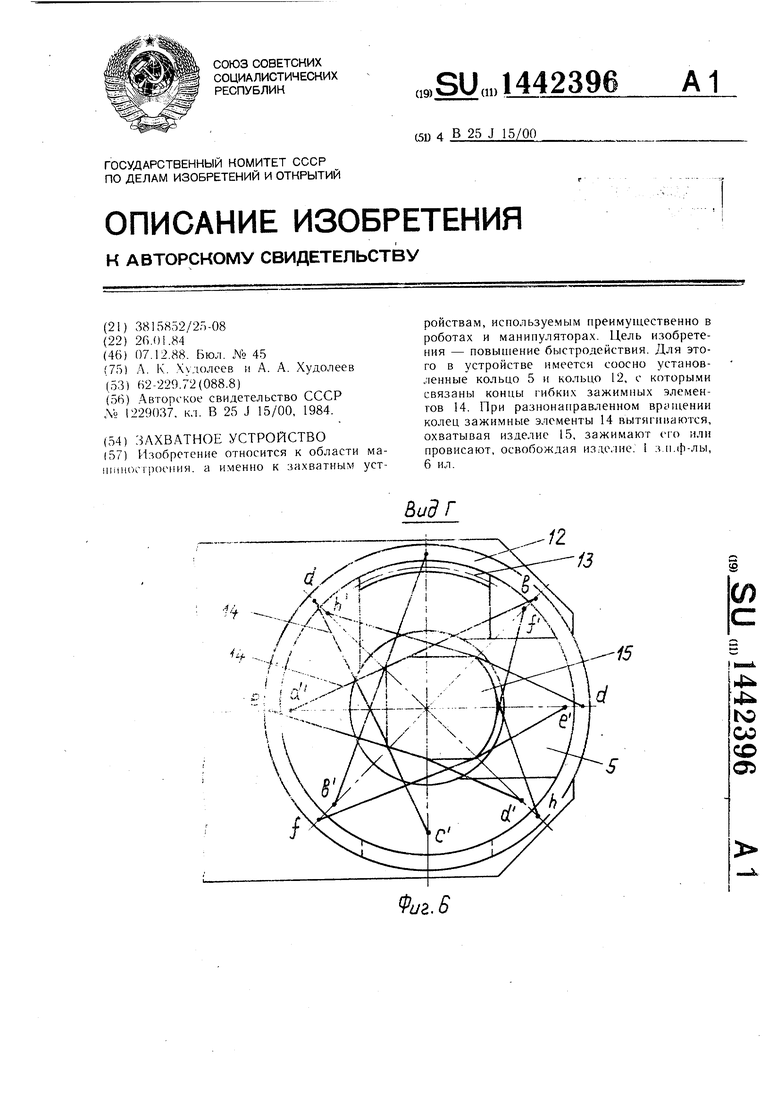
13
(О
(Л
с
NU .4
со со
О5
%г,В
Изобретение относится к машиностроению, а именно к захватным устройствам, используемым преимущественно в роботах, манипуляторах, а также других механизмах для погрузо-разгрузочных и подъемно-транспортных операций.
Целью изобретения является повышение быстродействия устройства.
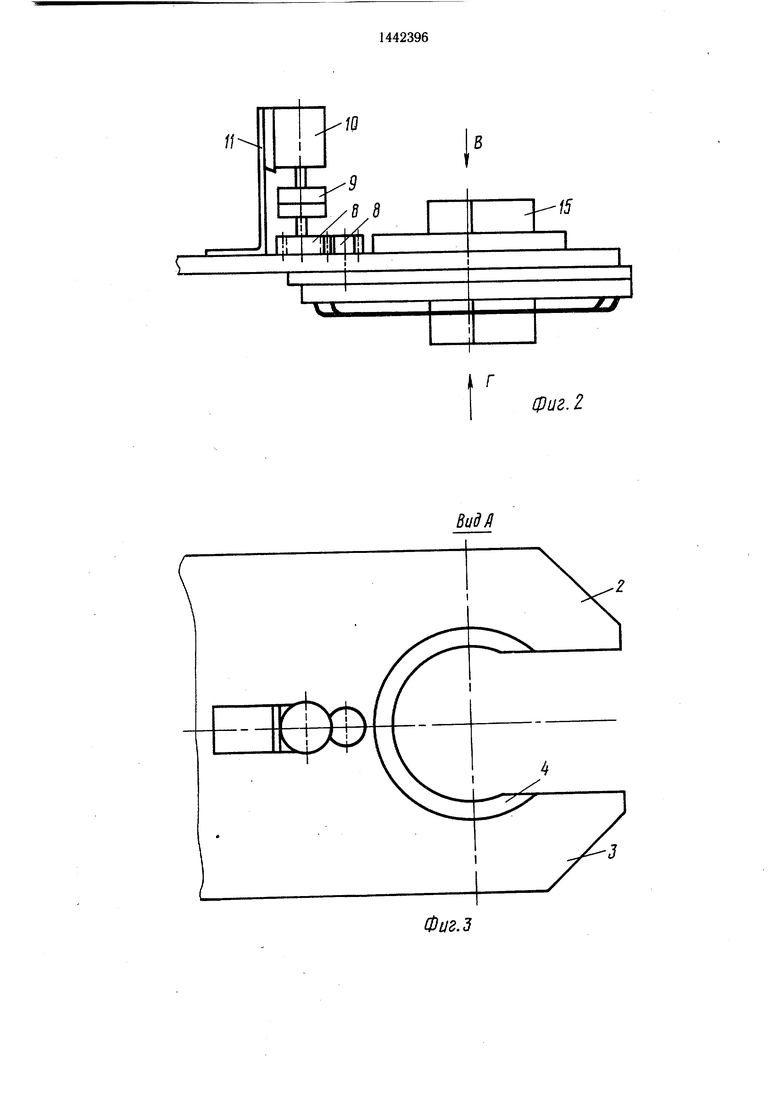
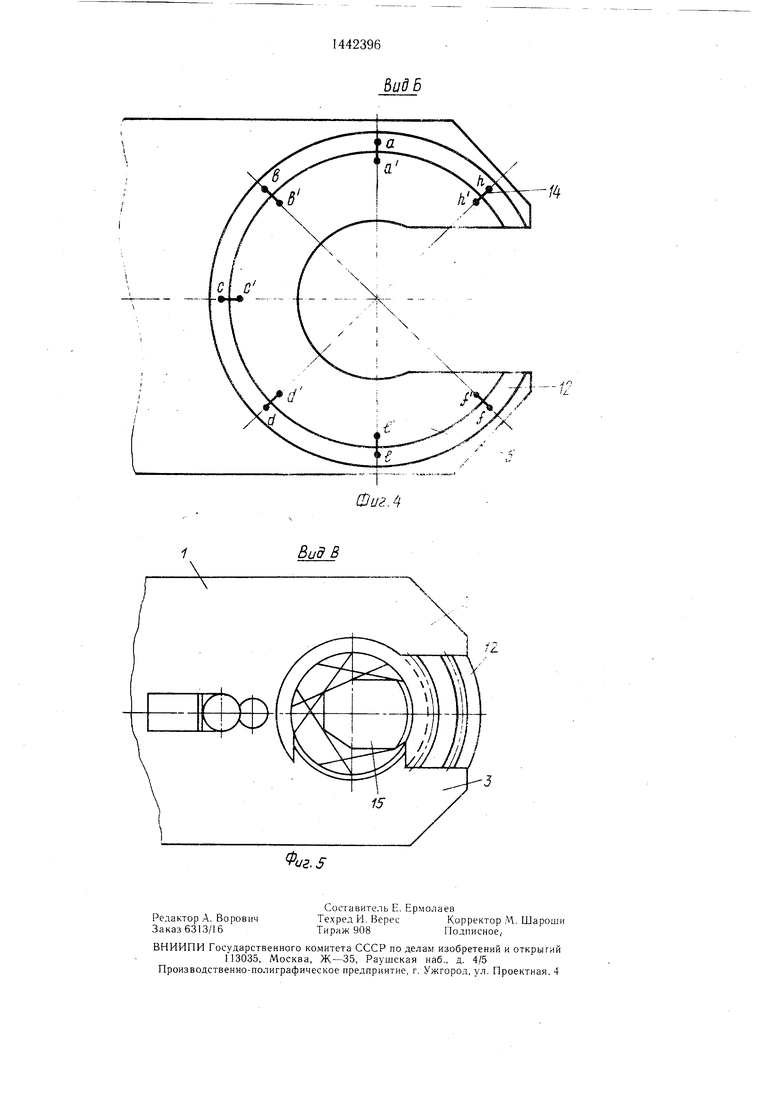
На фиг. 1 показано устройство в открытом положении, общий вид; на фиг. 2 - то же, в закрытом положении, общий вид; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - вид В на фиг. 2; на фиг. 6 - вид Г на фиг. 2.
15
Устройство содержит корпус I, выполненный с выступами 2 и 3, установленное в направляющих в корпусе i с возмджностью вращения относительно него и зафиксированное от осевого перемещения с помощью полудиска 4 кольцо 5 с прорезью, на внешней цилиндрической поверхности которого выполнены зубья 6. Кольцо 5 посредством колеса 7 кинематически связано с приводом, состоящим из колес 8, муфты 9 предельного момента и электродвигателя 10, закрепленного на кронштейне 11. В направляющих на корпусе 1 концентрично с коль- цом 5 с возможностью вращения относительно последнего установлено дополнительное кольцо 12 с пазом, на внутренней цилиндрической поверхности которого выполнены зубья 13, входящие в зацепление с колесом 7. С нижней стороны устройства од- .ними своими концами в точках а , Ь , c ,d , е , / и /г к кольцу 5, а другими концами в точках а, Ь, с, d, е, f н h к. кольцу 12 с пазом закреплены гибкие зажимные элементы 14, которые в открытом положении захватного устройства свободно свисают в виде петель.
Устройство работает следующим образом.
Руку робота заводят сбоку изделия 15 таким образом, чтобы оно оказалось прибли20
30
35
НИИ с зубьями кольца 5 и зубьями кольца 12, начинают поворачивать последние вокруг общей оси. При этом кольцо 5 и кольцо 12 поворачиваются в противоположные стороны а гибкие зажимные элементы 14, которые закреплены одними своими концами на кольце 5, а другими на кольце 12, вытягиваются и перекручиваются, обеспечивая надежный захват изделия 15. Затем после срабатывания муфты предельного момента 9 привод отключается. Благодаря тому, что кольцо 5 и кольцо 12 поворачиваются в разные стороны, угол поворота их в положении захвата изделия уменьшается вдвое. Потом изделие переносится рукой робота в необходимую точку пространства. Освобождение изделия происходит под действием привода при реверсировании привода. При этом кольцо 5 и кольцо 12 поворачиваются в исходное положение, гибкие зажимные элементы провисают, образуя петли, и отпускают изделие.
Формула изобретения
чают привод и электродвигатель 10 черези наружного зацеплений, выполненных соотмуфту предельного момента 9, колесо 8 ре-ветственно на основном и дополнительном
дуктора и колесо 7, находящееся в зацепле-кольцах.
0
5
0
0
5
НИИ с зубьями кольца 5 и зубьями кольца 12, начинают поворачивать последние вокруг общей оси. При этом кольцо 5 и кольцо 12 поворачиваются в противоположные стороны а гибкие зажимные элементы 14, которые закреплены одними своими концами на кольце 5, а другими на кольце 12, вытягиваются и перекручиваются, обеспечивая надежный захват изделия 15. Затем после срабатывания муфты предельного момента 9 привод отключается. Благодаря тому, что кольцо 5 и кольцо 12 поворачиваются в разные стороны, угол поворота их в положении захвата изделия уменьшается вдвое. Потом изделие переносится рукой робота в необходимую точку пространства. Освобождение изделия происходит под действием привода при реверсировании привода. При этом кольцо 5 и кольцо 12 поворачиваются в исходное положение, гибкие зажимные элементы провисают, образуя петли, и отпускают изделие.
Формула изобретения
фиг. г
Фиг.з
-/4
} //.
Фиг. 4
| Захватное устройство Худолеевых | 1984 |
|
SU1229037A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
