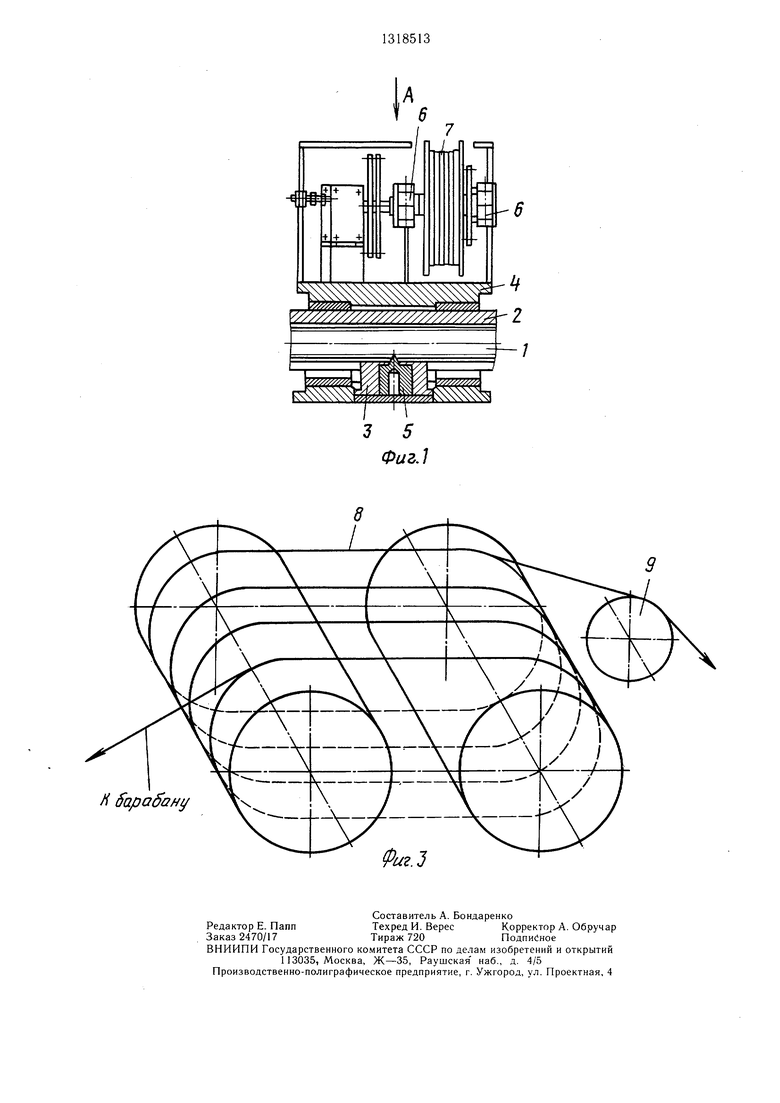
фиг. 3 - схема запасовки гибкого органа. Укладчик гибкого органа включает двухходовой винт 1 с перекрещиваюихейся нарезкой, расположенный в направляющей 2,
Изобретение относится к грузоподъемнымляющей 2 от усилия взаимодействия помеханизмам.водка 5 и резьбы ходового винта 1. Это
Цель изобретения - повышение точное-усилие сообщается каретке через ползун 3.
ти отсчета длины гибкого органа.Привод, ходового винта осуществляется
На фиг. 1 показан укладчик, общийчерез цепную передачу от вала барабана.
вид в разрезе; на фиг. 2 - вид А на фиг. 1; наСилами трения движущегося каната приводятся во вращательное движение в опорах 6 транзитные ролики 7, а с помощью зубчатых передач (шестерни 10 и 11) осуществляется привод механизмов узлов
в паз которой входит ползун 3, установ- 10счетчиков 12. В зависимости от числа оболенный в каретке 4, имеющей возмож-ротов транзитных роликов и передаточных
ность перемешаться вдоль оси барабанаотнощений зубчатых передач к узлам счетпо направляющей 2. В ползуне 3 укреп-чиков, на щкалах указателей идет отсчет
лены поводок 5, контактирующий с резь-соответственно больщих значений длин канабой ходового винта 1. На каретке 4 раз-та («грубый отсчет) и меньщих значений
мещены рядом установленные в подшипни- (точный отсчет).
ковых опорах 6 два транзитных роли-Сматывание каната с барабана с заме- ка 7, оси которых параллельны оси бара-ром его длины производится при включе- бана. Оба транзисторных ролика по наруж-нии приводного двигателя лебедки на «травной поверхности снабжены кольцевыми ка-ление и действии усилия в канате от навками (например, длиной 1 м и глуби- 20приложенной внешней нагрузки. Порядок раной, равной 0,4-0,5 толщины каната). Ка-боты устройства аналогичен описанному вы- навки одного ролика смещены, например,ше для наматывания каната на барана полшага относительно канавок другогобан.
ролика, что дает возможность выполнитьРабота устройства при боковом переме«винтовую запасовку каната 8 от бара-щении каната обеспечивается отводным щкибана лебедки на отводной щкив 9, обес- 25вом 9. печивая сцепление без проскальзывания каната по транзитным роликам. На валах ро-Формула изобретения
ликов 7 жестко сидят шестерни 10 и 11 ме-1. Укладчик гибкого органа с замером
ханизмов узлов счетчиков 12. Для син-его длины, содержащий направляющую, кахронного вращения роликов 7 на их валыретку с транзитным роликом для гибкого
также насажены шестерни 13, соединенныеоргана, ходовой винт для перемещения
через промежуточную паразитную шестерню 14. Привод ходового винта 1 осуществляется через цепную передачу от вала барабана.
Укладчик работает следующим образом.
каретки вдоль оси по направляющей и счетчик измерения длины гибкого органа, кинематически связанный с упомянутым роликом, отличающийся тем, что, с целью повышения точности отсчета длины гибкого
Канат 8 накладыв.ают на отводнойоргана, каретка укладчика снабжена отводшкив 9 и запасовывают вокруг транзит-ным шкивом, дополнительным транзитным
ных роликов 7 винтообразно с кольцевой канавки одного ролика на канавку другого
роликом, ось вращения которого расположена параллельно оси вращения основного транзитного ролика, при этом дополнитель- ка 4 находится в крайнем положении та- 40 ный транзитный ролик снабжен кинемати- ким образом, что первая кольцевая канав-чески связанным с ним дополнительным
и закрепляют на барабане. При этом каретка ближайшего к барабану ролика 7, с которой канат сходит к lyiecTy крепления, расположена в одной вертикальной плоскости с первым витком каната на барабане.
При включении приводного двигателя лебедки на «выбирание, канат наматывается на барабан и укладывается с определенным шагом за счет возвратно-поступательного движения каретки 4 по направ45
счетчиком измерения длины гибкого органа, причем оба транзитных ролика кинематически связаны между собой, а ось вращения отводного шкива параллельна осям вращения этих транзитных роликов.
2. Укладчик по п. , отличающийся тем, что на осях обоих транзитных роликов установлены шестерни, кинематически связанные между собой через промежуточную паразитную шестерню.
каретки вдоль оси по направляющей и счетчик измерения длины гибкого органа, кинематически связанный с упомянутым роликом, отличающийся тем, что, с целью повышения точности отсчета длины гибкого
5
счетчиком измерения длины гибкого органа, причем оба транзитных ролика кинематически связаны между собой, а ось вращения отводного шкива параллельна осям вращения этих транзитных роликов.
2. Укладчик по п. , отличающийся тем, что на осях обоих транзитных роликов установлены шестерни, кинематически связанные между собой через промежуточную паразитную шестерню.
+ +
7
Orl
///Z //y////////////2//
| название | год | авторы | номер документа |
|---|---|---|---|
| Кабельный кран | 1987 |
|
SU1532530A1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
| МОСТОВОЙ КРАН | 2010 |
|
RU2492134C1 |
| Канатоукладчик | 1980 |
|
SU943190A1 |
| Устройство для укладки гибкого элемента на барабан лебедки | 1984 |
|
SU1252294A1 |
| Самоходная лебедка для лесосплавных работ | 1984 |
|
SU1331815A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ГИБКОГО ТЯГОВОГО ОРГАНА НА БАРАБАН ЛЕБЕДКИ | 2017 |
|
RU2665999C1 |
| Лебедка | 1984 |
|
SU1348295A1 |
| Устройство для натяжения каната припЕРЕдАчЕ гРузОВ МЕжду СудАМи HA ХОдуВ MOPE | 1979 |
|
SU846391A1 |
| Устройство для замены катков пластинчатых питателей | 1980 |
|
SU952696A1 |
Изобретение относится к грузоподъемным механизмам. Цель изобретения - повышение точности отсчета длины гибкого органа. На .каретке размещены установленные в подшинниковых опорах 6 два транзитных ролика 7, оси вращения которых параллельны между собой и параллельны оси вращения барабана. На валах роликов 7 установлены шестерни 10 и 11 механизмов узлов счетчиков 12. Для синхронного вращения роликов 7 на их валы насажены шестерни 3, взаимодействующие через промежуточную паразитную шестерню 14. Каретка также снабжена отводным шкивом 9. Канат накладывают на отводной шкив 9 и запасовывают вокруг транзитных роликов 7. Нри включении приводного двигателя силами трения движущегося каната приводятся во вращательное движение транзитные ролики 7, а с помощью зубчатых нередач посредством niec- терен 10 и 11 осуи1ествляется привод механизмов узлов счетчиков 12. Работа устройства при боковом перемещении каната обеспечивается отводным шкивом 9. I з. п. ф-лы, 3 ил. В ид А Ъ ko 12 Шг Же GO оо ел оо /J
Фиг.
Составитель A. Бондаренко
Редактор Е. ПаппТехред И. ВересКорректор А. Обручар
Заказ 2470/17Тираж 720Подпийное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Деформируемый магниевый сплав | 1957 |
|
SU111246A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
