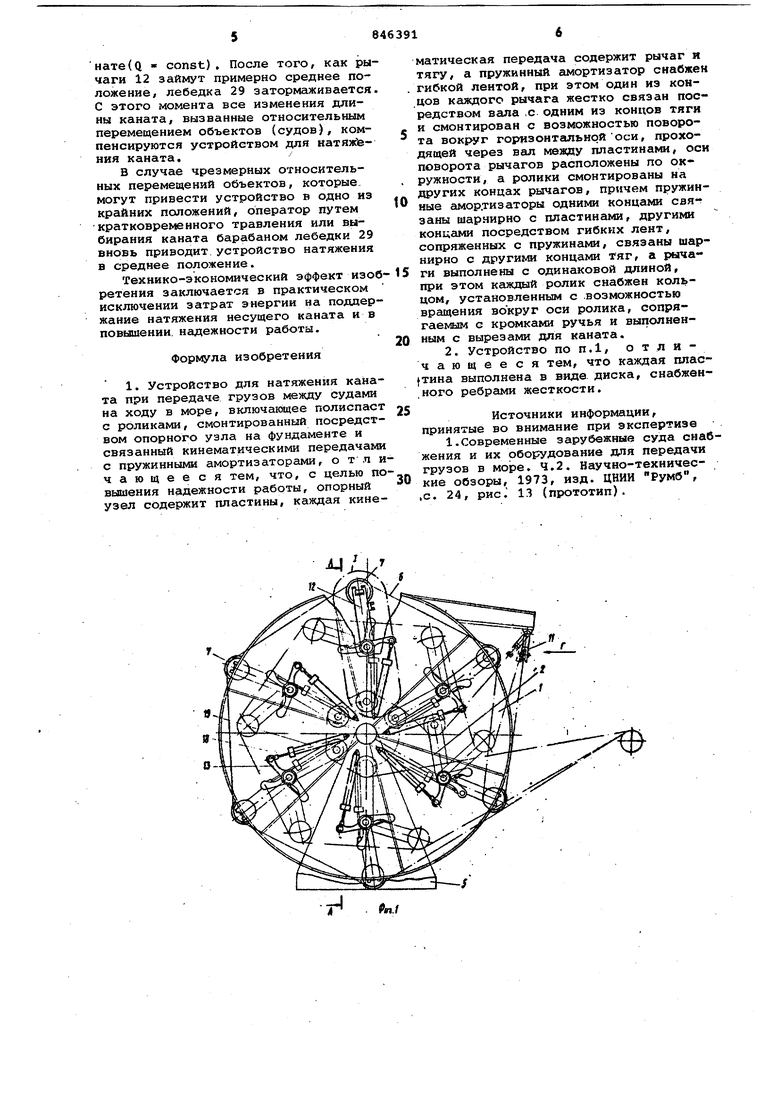
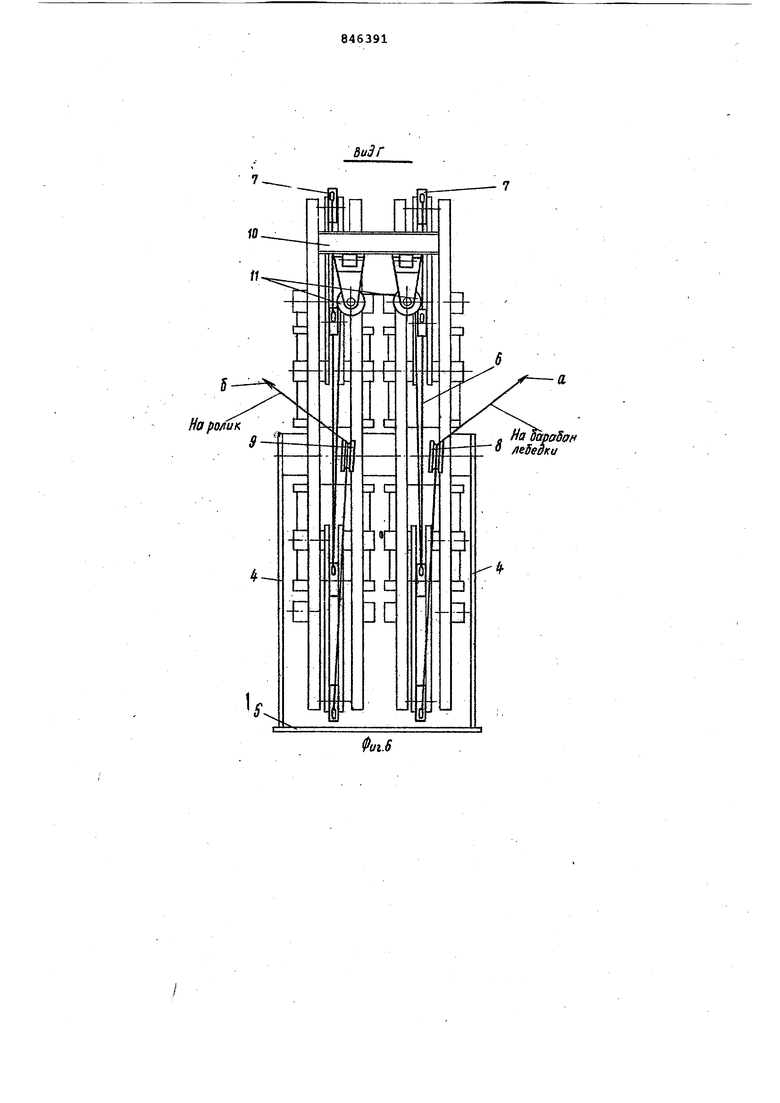
ки 4, имеющие фундамент 5. Канат 6 эапасованный в ролики 7 по периметру, ходовыми концами а и 5 через ролики 8 и 9 выходит наружу. Консоль 10 предназначена для закрепления транзитных роликов 11, служащих для проводки каната б с одного ряда роликов на друггой. На фиг,1,2, и 6 показано два ряда роликов 7, но при необходимости их можно предусмотреть три или даже четыре. Ролики 7 (фиг.З) закреплены на одном из концов подвижного рычага 12 кинематической передачи, состоящего из двух полоЁин, Рычаг 12 жест-, ко связан с одним концом тяги 13 посредством ступицы 14 и вала 15 и смонтирован с возможностью поворота вокруг горизонтальной оси 0-Qj проходящей через вал 15. Оси поворота рычагов 12 расположены по окружности. Кинематическая передача (12 и 13) в исходном положении, ограничиваемом стопором 16 , подзката пружинным .амортизатором, состоящим из пружины 17 и гибкой ленты 18 встроенных в корпус 19,. имеющим шарнирное крепление 20 одного конца на диске 1 Лента 18 амортизатора шарнирно закреплена на другом конце тяги 13 посредством хомута 21. Нижний торец пружины 17 опирается на круглое основание 22, жестко закрепленное к концу ленты 18. Рычаги 12 имеют одинаковую длину.
Осевая часть тяги 13 имеет канавку Ь (фиг.4 и 5)-, предназначенную для фиксированного взаимодействия с лентой 18 (фиг.З).
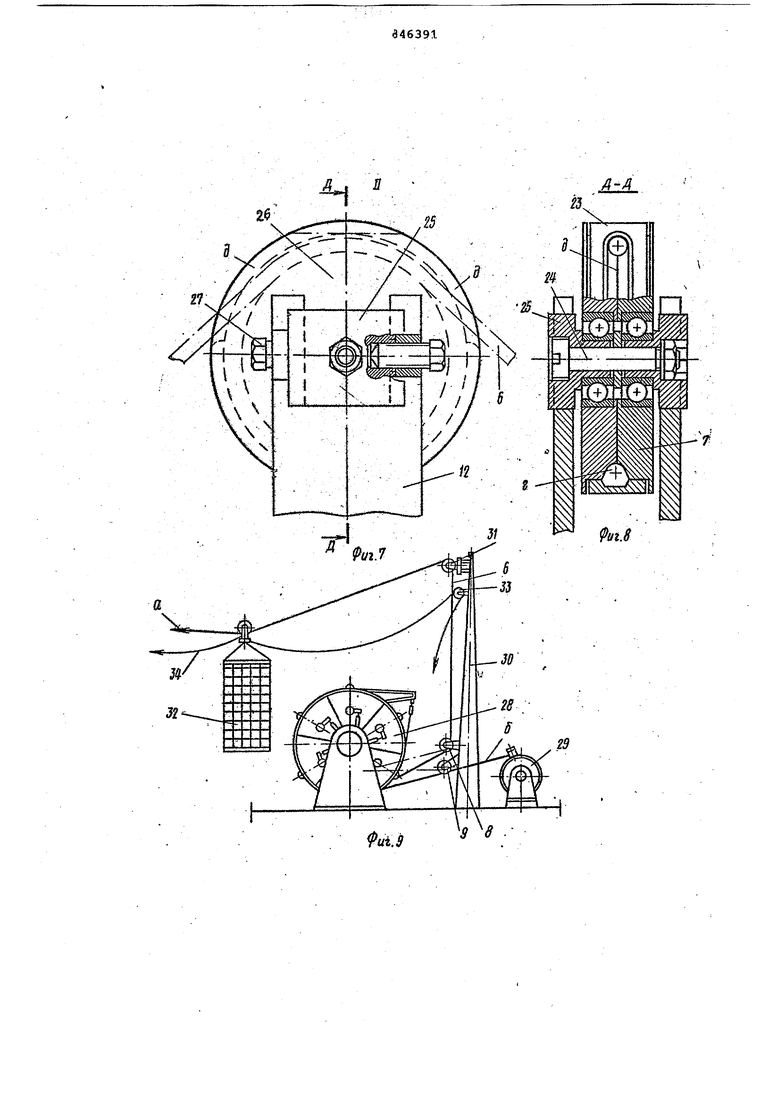
Конструкция роликов 7 (фиг.7 и 8) выполнена таким образом, что при любом их положенир канат б не может выскочить из ручья. Это достигается тем, что трос б в ручье t ограничен свободно вращающимся кольцом 23, сопрягаемым с кромками ручья и имеющим вырезы Э для прохода троса. Для технологического удобства заНасовки троса 6 в устройство натяжения при его сборке ролик 7 выполнен из двух половин (фиг.8), соединяемых осью 24. Крепление роликов на каждом подвижном рычаге 12 осуществляется. с помощью прямоугольных ступиц 25, вставляемых вместе с роликом 7 в пазы 26, фиксация роликов в пазах осуществляется болтами 27.. ;
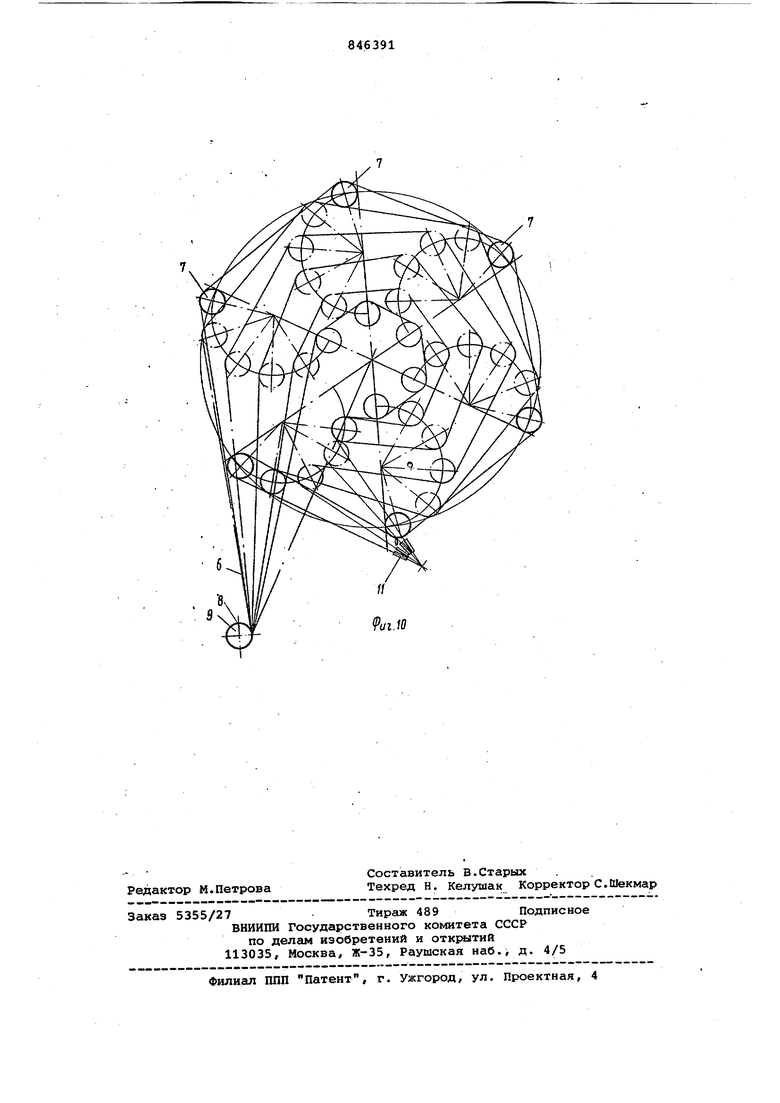
Ролики (фиг.10), перемещаясь из исходного в крайнее положение, .обеспечивают выход ходового конца троса на значительную величину, причем удлинение троса несущественно сказывается на изменении;усилия в целом. Это достигается соответствующим подбором профиля тяги 13 в месте ее взашлодействия с гибкой лентой 18.
Устройство 28 натяжения каната обеспечивает слежение за натяжением и длиной канатной дороги в пределах ее изменения за счет качки и рыскания
судов. Для обеспечения постановки канатной дороги, а также для случаев увеличения длины слежения и, кроме того, для хранения и подачи канатной дороги в устройство вводится тяговая лебедка 29, которая работает в кратковременном режиме (фиг.9). , Для работы канатной дороги предусматриваются также мачта 30, передающий ролик 31, тележка с контейнером 32, перетягивающий ролик 33 и провод|ник 34. Лдя запасовки каната б в ро лики 7 его необходимо продеть через каждое кольцо 23. Для этого предусморены вырезы 6.. После этого обе половинки роликов ттрисоедиияют по бокам к кольцу 23 и стягивают их осями 24. Каждый собранный таким образом ролик присоединяется к рычагу 12 и фиксируется болтами 27. Запасовку каната в ролики можно производить не снимая их с рычагов.
Предлагаемое устройство работает следующим образом.
Перед постановкой канатной дороги ходовой конец б каната б уложен на барабане лебедки 29, канат 6 охватывает Устройство 28 для натяжения каната, а его ходовой конец о пропущен через ролики 8 и 9 и закреплен на передиощем судне..
При постановке канатной дороги ходовой конец каната G подается на принимающее судно. Одновременно барабан лебедки 29 стравливает необходимую длину каната, который проходит через устройство 28 для натяжения и роли- ки 8 и 9. При этом устройство-находится в нерабочем состоянии, рычаги
12лежат на стопорах 16, натяжение в канате б отсутствует. После подачи ходового конца о каната б и его закрепления на принимающем судне лебедка 29 путем выборки ходового конца
5 каната приводит устройство для натяжения каната в рабочее состояние, создавая тем самым в канатной дороге натяжение, Это достигается следующим образом: после выборки слабины ходового 1{оица а в канате создается натяжение, которое при взаимодействии с роликами 7 за. счет равнодействующей, направленной к центру устройства, прикладывает к рычагам 12 момент относительно осей их вращения и заставляет поворачиваться вокруг вала 15. Создаваемый на рычаге 12 момент воспринимается посредством тяги 13 пружинным амортизатором, при зтом усилие, вызванное сжатием пружины 17 посредством гибкой ленты 18 и тяги
13создает уравновешивающий момент. При этом профиль канавки К тяги 13 подобран таким образом, чтобы при повороте кинематической передачи
(12 и 13) на любой произвольный угол в рабочем диапазоне момент, развивае,мый пружинно-ленточным устройством, создавал постоянное натяжение в канате(й « const). После того, как рычаги 12 займут примерно среднее положение/ лебедка 29 затормаживается С этого момента все изменения длины каната, вызванные относительным перемещением объектов (судов), компенсируются устройством для натяжения каната. В случае чрезмерных относительных перемещений объектов, которые, могут привести устройство в одно из крайних положений, оператор путем кратковременного травления или выбирания каната барабаном лебедки 29 вновь приводит устройство натяжения в среднее положение. Технико-экономический эффект изоб ретения заключается в практическом исключении затрат энергии на поддержание натяжения несущего каната ив повышении, надежности работы. Формула изобретения 1. Устройство для натяжения каната при передаче грузов между судами на ходу в море, включающее полиспаст с роликами, смонтированный посредством опорного узла на фундаменте и связанный кинематическими передачами с пружинныг® амортизаторами, о т л и чающееся тем, что, с целью по вышения надежности работы, опорный узел содержит пластины, каждая кинематическая передача содержит рычаг и тягу, а пружинный амортизатор снабжен гибкой лентой, при этом один из концов каждого рычага жестко связан посредством вала .с одним из концов тяги и смонтирован с возможностью поворота вокруг горизонтальнойОси, проходящей через вал между пластинами, оси поворота рычагов расположены по окружности, а ролики смонтированы на других концах рычагов, причем пружинные амор.тизаторы одними концами связаны шарнирно с пластинами, другими концами посредством гибких лент, сопряженных с пружинами, связаны шарнирно с другими концами тяг, а рычаги выполнены с одинаковой длиной, при этом каждаай ролик снабжен , установленным с .возможностью вращения вокруг оси ролика, сопрягаемым с кромками ручья и выполненным с вырезами для каната. 2. Устройство по П.1, отличающееся тем, что каждая пластина выполнена в виде диска, снабженного ребргцли жесткости. Источники информации, принятые во внимание при экспертизе 1.Современные зарубежные суда снабжения и их оборудование для передачи грузов в море. 4.2. Научно-технические обзоры, 1973, изд. ЦНИИ Румб, с. 24, рис 13 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема и передачи грузовой тележки канатной дороги | 1975 |
|
SU537891A1 |
| Устройство для стыковки шланговых соединений | 1973 |
|
SU478762A2 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Тележка для канатных дорог | 1973 |
|
SU556071A1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| Устройство для удержания и освобождения петли канатной дороги | 1977 |
|
SU623768A1 |
| Устройство траверзной передачи груза | 1984 |
|
SU1240680A1 |
| Передающе-приемная головка гидроподъемника | 1980 |
|
SU925748A1 |
| Устройство для перемещения вагонов | 1989 |
|
SU1703524A1 |
| Подвесная канатная дорога маятникового типа | 1977 |
|
SU737275A1 |


иг.2 .5 2t
Haf o/iuK
.. HaOapaSofff о AeSeOKu
..Ы
