Изобретение относится к строительной индустрии и может быть использовано при изготовлении предварительно напряженных железобетонных кон- струкдий.
Цель изобретения - снижение энергозатрат.
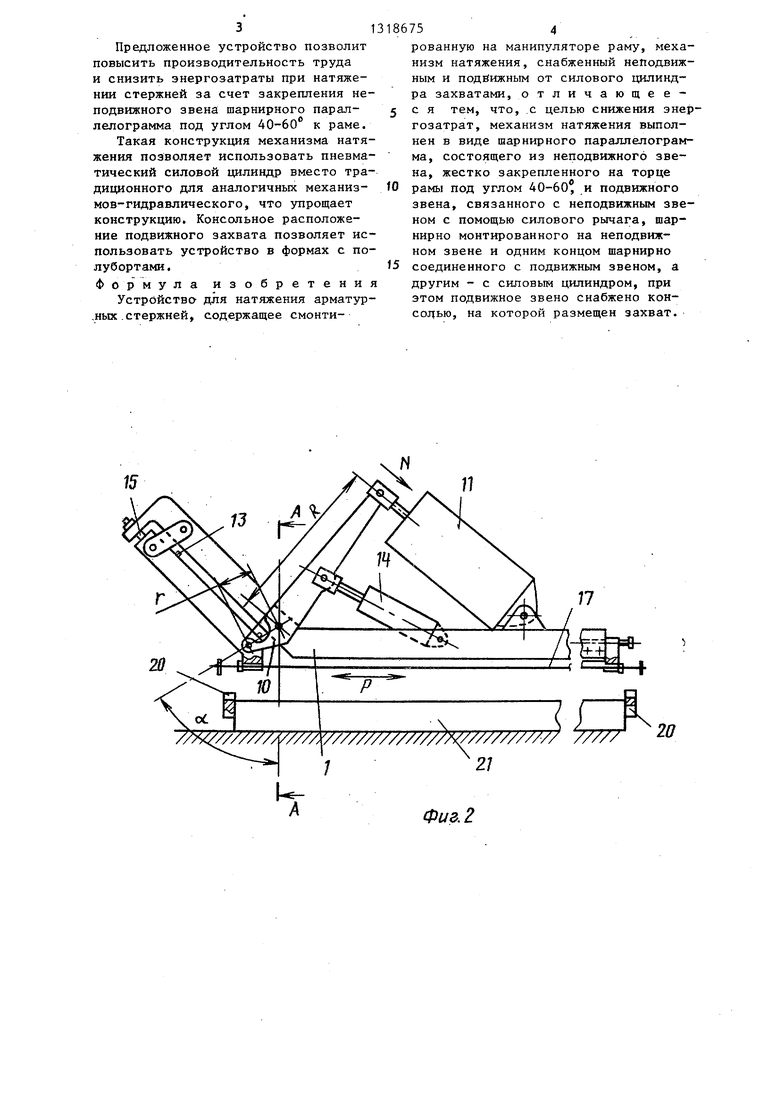
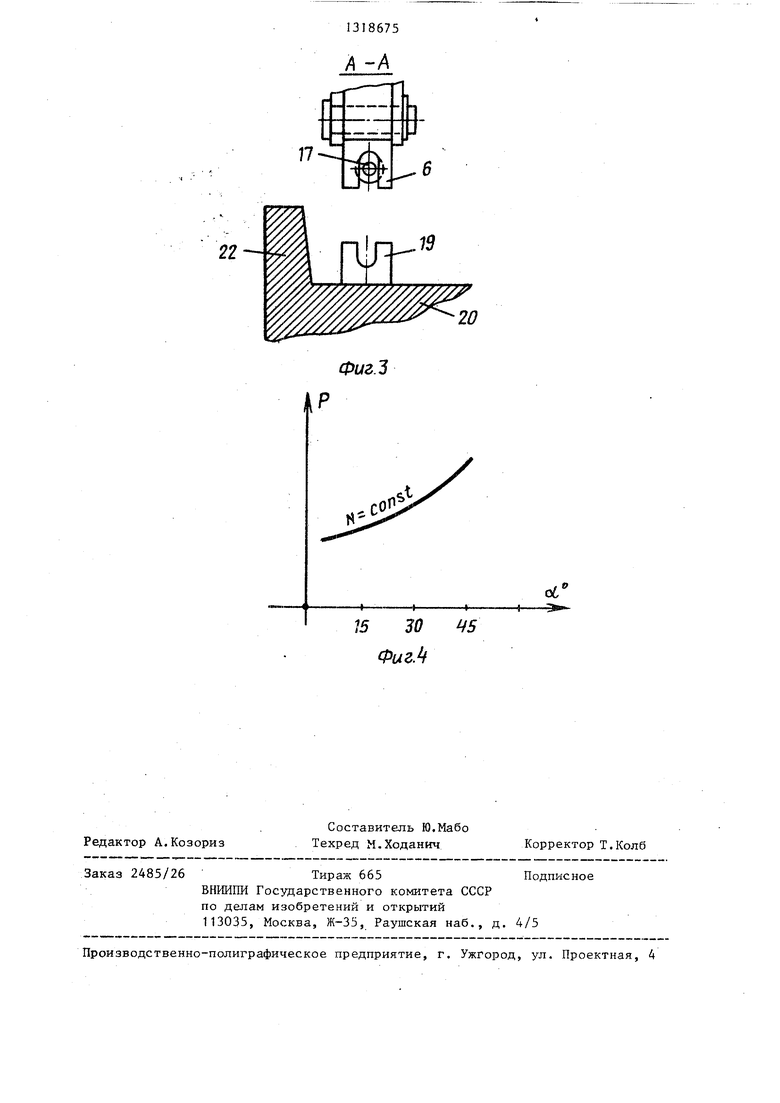
На фиг.1 показано устройство в положении перемещения его за очередным стержнем, общий вид; на фиг.2 - то же, в положении укладки натянутого стержня в упоры формы; на фиг.З - сечение А-А на фиг.2; на фиг.4 - график нарастания усилия натяжения в процессе удлинения стержня.
Рама 1 смонтирована на манипуляторе (не показан). Неподвижный ,захват 2 смонтирован на раме 1 с помощью кронштейна 3, .установленного на раме 1 с возможностью регулировочных перемещений с помощью регулировочного 4 и фиксирующих 5 винтов. Подвижный захват 6 размещен на направленной внкз консоли 7, выполненной на нижнем конце звена 8 шарнирного параллелограмма. Параллельное звену 8 звено 9 параллелограмма, жестко соединено с торцом рамы 1 в виде консоли, расположенной под углом 40-60° к раме. При этом смеж- jHoe звену 8 звено 10, связанное с- ним в зоне консоли 7, является плечом рычага, шарнирно связанного с силовым цилиндром 11 своим другим плечом 12. Установочные винты 13, расположенные на звене 8, служат для регулировки и фиксации исходного положения подвижного захвата 6. Демпфер 14, шарнирно связанный с плечом 12 и рамой 1, служит для компенсации рывков при случайных обрывах натягиваемых стержней.
В процессе наладки исходное положение подвижного захвата 6 устанавливают и фиксируют винтами 13, а конечное положение - с помощью винта 15, размещенного на кронштейне 16, закрепленном на конце звена 9. Арматурный стержень 17 снабжен внутренними 18 и наружными 19 анкерами. Упоры 20 установлены на торцах формы 21. Звено 8 смонтировано на звеет обеспечить угол об иилсс , эфс|)ективно снизить величину знаменателя г-cos об, а угол более 60 создает трудности с размещением силовоне 9 с Помощью подвески 22 и звена 10,
В процессе работы в положении, по- 55го цилиндра, а также создает возказанном на фиг.1, раму 1 перемещаютможность-к получению углао, близкоманипулятором на подготовленный к на-му к 90°, при котором значение Р
тяжению стержень 17, имеющий на кон-может вырасти до недопустимой для нецах по два анкера. При этом захватысущей способности рамы 1 величины.
5
0
2 и 6 размещают между внутренними анкерами 18. Затем с помощью силового цилиндра 11 захват 6 приводят в движение, а когда он упирается в анкер 18 стержня 17 и начинается процесс натяжения, раму 1 перемещают манипулятором к месту установки натянутого стержня в упоры формы (фиг.2). Натянутый стержень 17 помещают в упоры 20 формы 21 так, что наружные анкеры 19 размещаются снаружи упоров 20. Далее с помощью силового щииндра 11 усилие натяжения стержня 17 передают с рамы 1 на упоры 20. Далее цикл повторяется.
Такое размещение подвижного захвата и система его привода обеспечивают оптимальную кинематику подвижного Захвата, при которой усилие натяжения растет по мере удлинения натягиваемого стержня в зависимости от роста угла оС поворота рычага, поворачиваемого сило- ым цилиндром по зависимости
5
0
У EiB . Г . COS Oi
где Р - усилие натяжения
усилие, создаваемое силовым цилиндром,
Р
N R - длина плеча 12 рычага; г - длина плеча 10 рычага; oi-i - угол между плечом 12 и штоком
цилиндра 11;
oi - угол поворота звена 10 от 5 перпевдикуляра к раме 1.
При этом скорость натяжения стержня снижается в соответствии с ростом силы натяжения при постоянной
0 скорости поворота рычага. Это устраняет необходимость в излишней мощности привода натяжения и в излиш- них энергозатратах, а также позволяет повысить скорость натяжения в на5 чале этого процесса, что повьш1ает производительность труда при натяжении стержней. Угол разворота неподвижного звена 9 относительно рамы 1 принят в диапазоне 40-60,
о
не позволя- более 55 т.е.
0 так как угол менее 40
ет обеспечить угол об иилсс , эфс|)ективно снизить величину знаменателя г-cos об, а угол более 60 создает трудности с размещением силово
313
Предложенное устройство позволит повысить производительность труда и снизить энергозатраты при натяжении стержней за счет закрепления неподвижного звена шарнирного параллелограмма под углом 40-60 к раме.
Такая конструкция механизма натяжения позволяет использовать пневматический силовой цилиндр вместо традиционного для аналогичных механиз- мов-гидравлического, что упрощает конструкцию. Консольное расположение подвижного захвата позволяет использовать устройство в формах с полубортами.
Формула изобретения Устройство для натяжения арматур- ,ных.стержней, содержащее смонти754
рованную на манипуляторе раму, механизм натяжения, снабженный неподвижным и подвижным от силового цилиндра захватами, отличающеес я тем, что, .с целью снижения энергозатрат, механизм натяжения выполнен в виде шарнирного параллелограмма, состоящего из неподвижного звена, жестко закрепленного на торце рамы под углом 40-60 и подвижного звена, связанного с неподвижным звеном с помощью силового рычага, шар- нирно монтированного на неподвижном звене и одним концом шарнирно соединенного с подвижным звеном, а другим - с силовым цилиндром, при этом подвижное звено снабжено кон- содью, на которой размещен захват.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электронагрева арматурных стержней | 1978 |
|
SU750022A1 |
| Установка для укладки предварительно напряженной арматуры в форму | 1990 |
|
SU1815321A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Автозагрузчик | 1980 |
|
SU1057269A1 |
| Устройство для подачи воды к поливным машинам в движении | 1978 |
|
SU692596A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| МАНИПУЛЯТОР ДЛЯ ПОВОРАЧИВАНИЯ МАНИПУЛИРУЕМОГО ОБЪЕКТА | 2016 |
|
RU2719226C1 |
Изобретение относится к строительной индустрии и может быть использовано при изготовлении предварительно напряженных железобетонных конструкций. Цель изобретения - снижение энергозатрат. Устройство для натяжения арматуры содержит смонтированную на манипуляторе раму 1, снабженную неподвижным зв еном 9 и подвижным звеном 8. Неподвижное звено 9 шарнирного параллелограмма жестко закреплено на раме под углом 40-60 к ней в вертикальной плоскости, при этом подвижное звено 8 снабжено направленной вниз консолью 7, на которой размещен подвижный захват 6. 4 ил. сл П 00 3 сх О5 ел Фиг.1
15
// ////////
P //r///// // /// XV//////////// /77//
Л/У/
П
77
V//////////// /77//
Л/У/
20
21
Фиг. 2
/4-Д
Фиг.З
Н .
c
Редактор А.Козориз
Составитель Ю.Мабо Техред М.Ходанич.
Заказ 2485/26
Тираж 665
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
.
Корректор Т.Колб
Подписное
| 0 |
|
SU264671A1 | |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Авторское свидетельство СССР №916718, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
