Изобретение относится к машиностроению и может найти применение в устройствах загрузки металлорежущих станков, например токарных вертикальных многошпиндельных полуавтоматов.
Известно устройство манипулятора для загрузки-выгрузки вертикальных токарных полуавтоматов, содержащее исполнительный орган, выполненный в виде параллелограмма, которьш смонтирован на корпусе, установленном на шарнире, обеспечивающем поворот исполнительного органа на определенный угол. Вертикальное перемещение захвата, установленного на исполнительном органе, обеспечивается специальным приводом, смонтированным на корпусе манипулятора.
Манипулятор осуществляет загрузку и выгрузку деталей в две фиксированные точки, которые определяются углом поворота и нижним положением захвата, которое определяется соотношением плеч кривошипа и рЬ1чага привода вертикального перемещения. При этом нижняя координата по вертикали остается постоянной для всех угловых положений 1.
Недостатками данного устройства являются: большие производственные площади, необходимые для работы манипулятора, так как зона поворота исполнительного органа должна быть свободной от других механизмов, препятствующих его повороту.
Для обеспечения работоспособности при загрузке и выгрузке деталей точки должны иметь одинаковые координаты по высоте, что осуществить трудно, поскольку готовки имеют различные размеры по высоте, высота заготовки, устанавливаемой на станок, больше, чем высота обрабатываемой детали, снимаемой со станка, при замене обрабатываемой детали меняется наладка, а следовательно, и патрон станка, что приводит к изменению базовых поверхностей патрона по высоте по отношению к базовой поверхности позиции выгрузки.
Цель изобретения - расширение технологических возможностей.
Указанная цель достигается тем, что авто загрузчик, содержащий исполнительный орган, выполненный в виде параллелбграммного механизма, схват и приводы исполнительного органа и схвата, исполнительный орган снабжен дополнительным рычагом, установленным перпендикуляр но плоскости перемещения параллелогра.ммного механизма, причем на одном конце дополнительного рь1чага выполнены направляющие, а другой конец связан с двумя звеньями параллелограммного механизма, одно из которь1х связано с приводом исполнительного органа, при этом привод схвата выполнен в виде силового цилиндра, гильза которого установлена в направляющих.
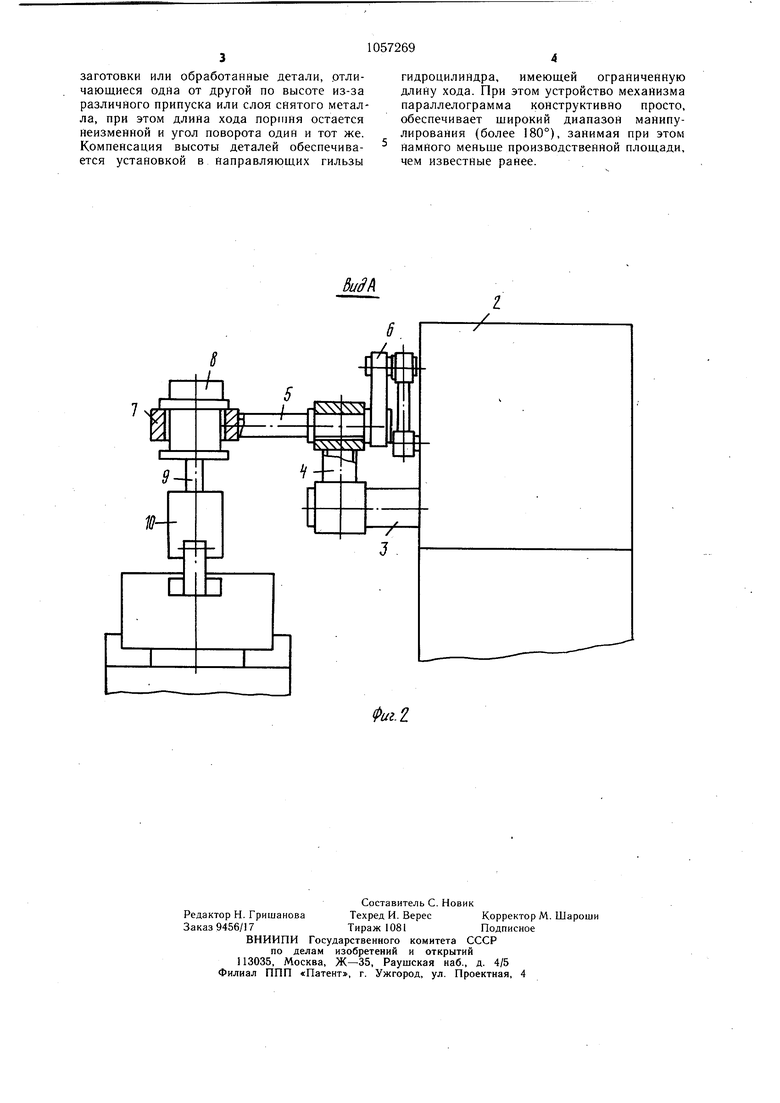
На фиг. 1 изображен автозагрузчик, общий вид: на фиг. 2 - вид по стрелке А .на фиг. 1.
Устройство автозагрузчика установлено в автоматической линии ЛС-21, где в тех5 нологическом порядке установлены токарные вертикальные многошпиндельные полуавтоматы модели 1А286-8, соединенные между собой общим транспортером. Автозагрузчик установлен в рабочем пространстве меж10 ду линией станков и упомянутым транспортером. На вертикальной стойке 1, установлен механизм привода 2, корпус которого является неподвижным звеном параллелограмма, образующего исполнительный орган. На выходном валу 3 привода жестко закрепле5 но несущее звено 4 параллелограмма. Крайние положения звена 4 регулируются посредством жестких упоров, ограничивающих ход привода. На противоположном конце звена
4в шарнирной опоре смонтирован рычаг 5, который одним концом Неподвижно соединен со звеном 6, противоположным неподвижному звену 2, а на другом конце рычага
5выполнены направляющие 7, в которых перемещается гильза 8 гидроцилиндра с ограниченной длиной хода. На штоке 9 гид5 роцилиндра закреплен захват 10. Исходное положение автозагрузчика, когда разжат захват 10, находится над транспортером 11, а шток 9 гндроцилиндра - в крайнем верхнем положении. При наличии детали под захватом 10 поступает команда на выдви0 жение штока 9 гидроцилиндра в крайнее нижнее положение. За счет возможности перемещения гильзы 8 гидррцилиндра в направляющих 7 компенсируется разновысокость поступающих заготовок. По окончании хода штока 9 гидроцилиндра вниз
захват 10 захватывает деталь и шток 9 гидррцилиндра перемещается в крайнее верхнее положение, снимая деталь с фиксаторов транспортера 11, затем параллелограмм соверщает поворот к щпинделю станка.
0 После окончания поворрта щток 9 гидроцилиндра выдвигается в крайнее нижнее положение, опуская деталь в кулачки патрона. Затем разжимается захват 10, шток 9 гидроцилиндра перемещается в верхнее крайнее положение и параллелограмм возвраща5 ется в исходное положение. Выгрузка обработанной детали происходит в обратной последовательности. После выгрузки детали на транспортер 11 последний убирает готовую деталь и подает на ее место заготовку, которая загружается в станок. При изменении наладки, приводящей к изменению высоты патронов станка, перенастраивается угол поворота параллелограмма. При необходимости такую перенастройку можно произвести и в зоне транспортера.
Благодаря такому конструктивному исполнению расшираются технологические возможности, например одним и тем же захватом возможно брать без переналадки
заготовки или обработанные детали, .отличающиеся одна от другой по высоте из-за различного припуска или слоя снятого металла, при этом длина хода поршня остается неизменной и угол поворота один и тот же. Компенсация высоты деталей обеспечивается установкой в направляюш,их гильзы
гидроцилиндра, имеющей ограниченную длину хода. При этом устройство механизма параллелограмма конструктивно просто, обеспечивает щирокий диапазон манипулирования (более 180°), занимая при этом намного меньше производственной площади, чем известные ранее.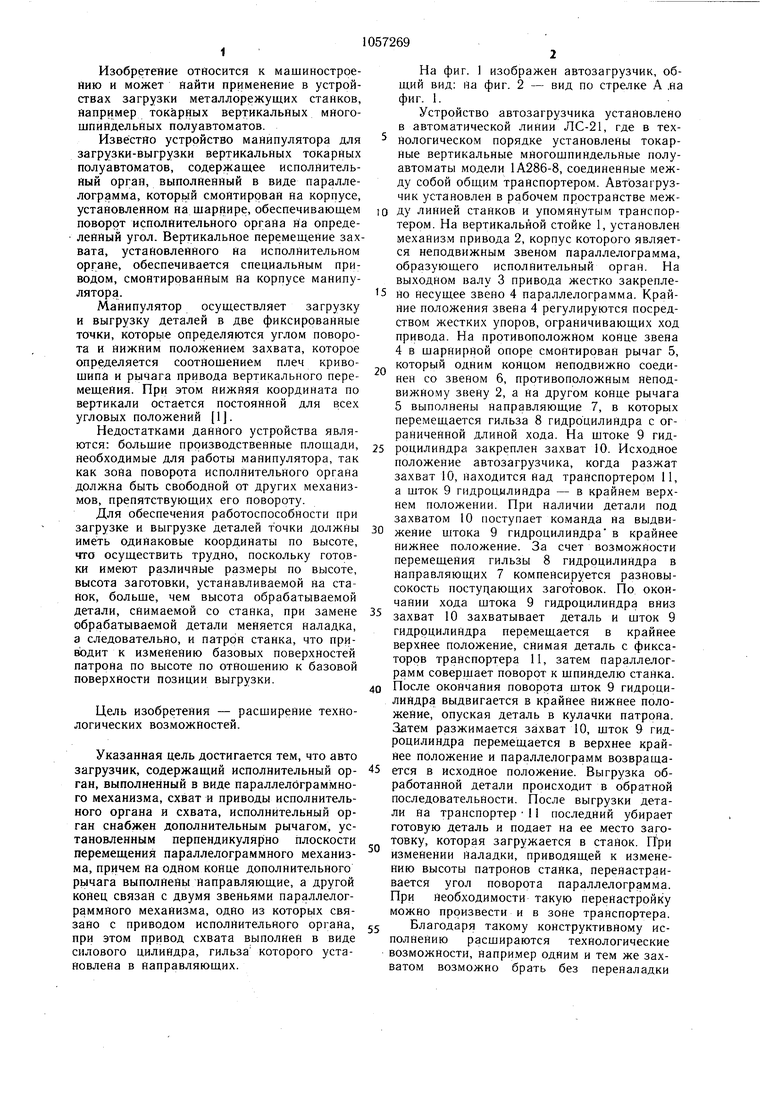
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1222544A1 |
| Автооператор для работы на многошпиндельных патронных автоматах | 1960 |
|
SU139902A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Манипулятор | 1985 |
|
SU1373563A1 |
| Схват манипулятора | 1983 |
|
SU1138316A1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| Кисть манипулятора | 1987 |
|
SU1421532A1 |
| Загрузочно-разгрузочное устройство | 1978 |
|
SU795687A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
АВТОЗАГРУЗЧИК, содержащий исполнительный орган, выполненный в виде параллелограммного механизма, схват и приводы исполнительного органа и схвата, отличающийся тем, что, с целью расширения технологических возможностей, исполнительный орган снабжен дополнительным рычагом, установленным перпендикулярно плоскости перемещения параллелограммного механизма, причем на одном конце дополнительного рычага выполнены направляющие, а другой конец рычага связан с двумя звеньями параллелограммного механизма, одно из кОторь1Х связано с приводом исполнительного органа, при этом привод схвата выполнен в виде силового цилиндра, гильза которого установлена в направляющих дополнительного .рычага. (Л О1 N3 О со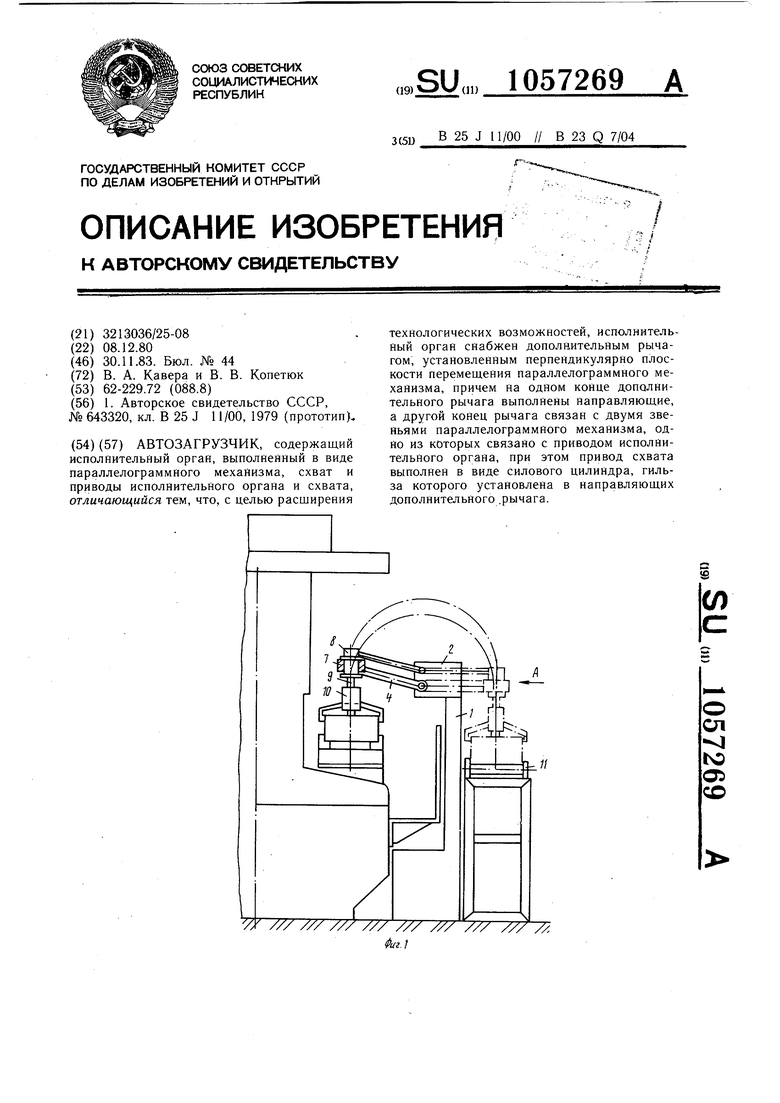
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР, № 643320, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
