Область техники, к которой относится изобретение
Настоящее изобретение относится к манипулятору для поворачивания манипулируемого объекта, содержащему стойку с поворотной базой, выполненной с возможностью поворота в горизонтальной плоскости вокруг вертикальной поворотной оси посредством приводного устройства относительно стойки, причем поворотная база содержит консоль с расположенным на свободном конце консоли грузонесущим элементом для соединения с манипулируемым объектом, причем грузонесущий элемент содержит поворотное устройство для поворота манипулируемого объекта в горизонтальной плоскости, причем для образования в горизонтальной плоскости поворотного шарнирного четырехугольника, включающего в себя консоль, предусмотрена управляющая штанга, проходящая от стойки до поворотного устройства, одним концом шарнирно соединенная с поворотным устройством грузонесущего элемента, а другим концом шарнирно соединенная со стойкой посредством управляющего механизма, так что при поворотном движении поворотной базы посредством управляющего механизма и управляющей штанги осуществляется поворотное движение грузонесущего элемента, наложенное на поворотное движение базы.
Уровень техники
Манипуляторы указанного типа, в частности, используются при манипулировании крышками выпускных желобов в непосредственной близости доменной печи или при манипулировании буровыми лафетами устройств для бурения леток. При этом, вследствие расположения в непосредственной близости от доменной печи по обе стороны выпускного желоба других необходимых для ее эксплуатации устройств, таких как, например, устройство для забивки леток, возникает теснота при работе. Так например, крышка выпускного желоба, после того, как она была снята с него, должна быть переведена в зафиксированное положение сбоку от выпускного желоба, причем во время поворота поворотной базы манипулятора должно быть осуществлено поворотное движение, наложенное на поворотное движение базы, во избежание, например, столкновения с устройством для бурения леток или устройством для забивки леток.
По этой причине в случае манипуляторов, используемых до сих пор, в дополнение к поворотному приводу поворотной базы манипулятора, обеспечивающей поворот расположенной на поворотной базе консоли относительно стойки манипулятора, грузонесущий элемент, расположенный на свободном конце консоли и служащий для соединения с манипулируемым объектом, снабжают дополнительным поворотным приводом. Помимо того, что расположение дополнительного поворотного привода на грузонесущем элементе увеличивает весовую нагрузку на консоль, поворотный привод, расположенный на грузонесущем элементе также подвергается термическим нагрузкам, в частности, в случае манипулирования крышками выпускных желобов, так как крышки выпускных желобов имеют высокую температуру в связи с теплом, излучаемым выходящей из летки доменной печи раскаленной сталью, а эта температура, в свою очередь, вследствие теплопроводности и излучения тепла воздействует от крышки выпускного канала на поворотный привод. Из этих высоких термических нагрузок следуют соответственно высокие расходы на обслуживание и - в случае возникновения повреждений - ремонт, что негативным образом сказывается на бесперебойной работе доменной печи.
Раскрытие сущности изобретения
Таким образом, в основе настоящего изобретения лежит задача предложить манипулятор указанного вначале типа, требующий меньших расходов на обслуживание.
Для решения этой задачи манипулятор согласно изобретению обладает признаками, раскрытыми в пункте 1 формулы.
Согласно изобретению, для образования в горизонтальной плоскости поворотного шарнирного четырехугольника предусмотрена управляющая штанга, проходящая от стойки до поворотного устройства, одним концом шарнирно соединенная с поворотным устройством грузонесущего элемента, а другим концом шарнирно соединенная со стойкой посредством управляющего механизма, так что при поворотном движении поворотной базы посредством управляющего механизма и управляющей штанги осуществляется поворотное движение грузонесущего элемента, наложенное на поворотное движение базы.
Выполненный согласно изобретению манипулятор посредством управляющего механизма обеспечивает возможность поворотного движения грузонесущего элемента, связанного с поворотным движением поворотной базы относительно стойки, так что приводное устройство, предусмотренное для поворота поворотной базы, одновременно может использоваться для поворота грузонесущего элемента, причем посредством управляющего механизма обеспечивается, чтобы поворотное движение грузонесущего элемента происходило раньше, позже или противоположно поворотному движению поворотного привода и тем самым грузонесущий элемент и соединенный с ним манипулируемый объект мог занимать поворотные положения, отличные от положений поворотной базы. Управляющий механизм позволяет управлять поворотными положениями манипулируемого объекта, соединенного с грузонесущим элементом, например, предотвращать столкновение манипулируемого объекта с объектом, находящимся в области поворотного пути, например устройством для забивки леток или устройством для бурения леток, за счет поворота угла манипулируемого объекта, расположенного, по существу, плоско в горизонтальной плоскости, противоположно поворотному движению поворотной базы в области столкновения или за счет поворачивания его с большей скоростью вращения, так чтобы он мог пройти мимо объекта без столкновения.
Таким образом, при помощи управляющего механизма может быть задано не только направление поворота, но и скорость вращения грузонесущего элемента и соединенной с ним крышки выпускного желоба, посредством заданной управляющим механизмом функции, согласно которой поворотное движение зависит от поворотного движения поворотного привода.
В предпочтительном варианте осуществления управляющий механизм содержит выполненное на стойке направляющее устройство, взаимодействующее с выполненным на поворотной базе управляющим рычагом, шарнирно соединяющим управляющую штангу с направляющим устройством, так что не только управляющая функция посредством управляющего механизма реализуется на грузонесущем элементе, но и управляющий рычаг обеспечивает надежную передачу управляющих сил.
Если направляющее устройство определяет кривую управления, вдоль которой проводится управляющая головка управляющего рычага, поворотное движение грузонесущего элемента может быть простым образом адаптировано к имеющимися на рабочем месте условиям столкновения путем индивидуального определения кривой управления.
Кривая управления предпочтительно выполнена в виде направляющего паза, в зацепление с которым входит управляющая головка, выполненная в виде захвата, так что возможна механически простая в исполнении и прочная реализация кривой управления.
Направляющее устройство предпочтительно выполнено в виде соединенного со стойкой управляющего диска, что, в частности, позволяет адаптировать управляющий механизм к имеющимся на рабочем месте особым условиям столкновения путем простой замены управляющего диска.
Предпочтительно управляющий рычаг выполнен в виде качающегося рычага с зафиксированной на поворотной базе рычажной осью для поворотной установки управляющего рычага в плоскости поворота, параллельной плоскости направления направляющего устройства, причем первое плечо управляющего рычага образует управляющее плечо рычага, конец которого посредством управляющей головки входит в зацепление с направляющим устройством, а второе плечо рычага, будучи приводным плечом рычага, образует приводной элемент поворотного шарнирного четырехугольника.
Если рычажная ось расположена над консолью на поворотной базе и пересекает продольную ось параллельной консоли, то, несмотря на отличающиеся друг от друга положения рычажной оси управляющего рычага и поворотной оси консоли на поворотной базе, в горизонтальной плоскости образуется поворотный шарнирный четырехугольник.
Управляющий механизм предпочтительно содержит поворотный несущий элемент, соединенный с поворотной базой, направляющее устройство, соединенное со стойкой, и управляющий рычаг, соединенный с поворотный несущим элементом посредством рычажной оси, что позволяет сделать исполнение управляющего механизма особенно компактным.
Согласно особенно предпочтительному варианту осуществления манипулятора, особенно подходящего для манипулирования крышками выпускных желобов, для образования подъемного рычажного механизма, содержащего выполненный в вертикальной плоскости подъемный шарнирный параллелограмм, консоль шарнирно установлена на поворотной базе посредством поворотной оси и расположена параллельно плечу нагрузки, шарнирно установленному на поворотной базе посредством поворотной оси, причем консоль и плечо нагрузки шарнирно соединены своими концами, противоположными поворотной базе, посредством грузонесущего элемента.
Для образования поворотного шарнирного четырехугольника в виде поворотного шарнирного параллелограмма консоль предпочтительно расположена параллельно управляющей штанге, что обеспечивает особенно износостойкую кинематику.
Поворотная ось консоли предпочтительно выполнена вместе с рычажной осью управляющего рычага на поворотном несущем элементе.
Согласно особенно предпочтительному варианту осуществления, приводное устройство служит как для поворота подъемного рычажного механизма, так и для поворота поворотного устройства грузонесущего элемента.
Если приводное устройство выполнено на направляющем устройстве, в частности, на направляющем устройстве, выполненном в виде управляющего диска, то как перенос приводного усилия на поворотную базу, так и перенос приводного усилия на управляющий рычаг может проходить по кратчайшему пути, что позволяет не использовать силовые передачи и т.п.
В особенно предпочтительном варианте осуществления кривая управления выполнена таким образом, что она определяет последовательность точек управления, расстояние до которых от вертикальной поворотной оси поворотной базы определяет угол параллелограмма, образованный между приводным элементом и неподвижным элементом горизонтального шарнирного параллелограмма, образованным расстоянием между рычажной осью и поворотной осью грузонесущего элемента.
Краткое описание чертежей
Предложенное изобретение детально рассмотрено ниже на основании предпочтительного варианта осуществления, изображенного на фигурах.
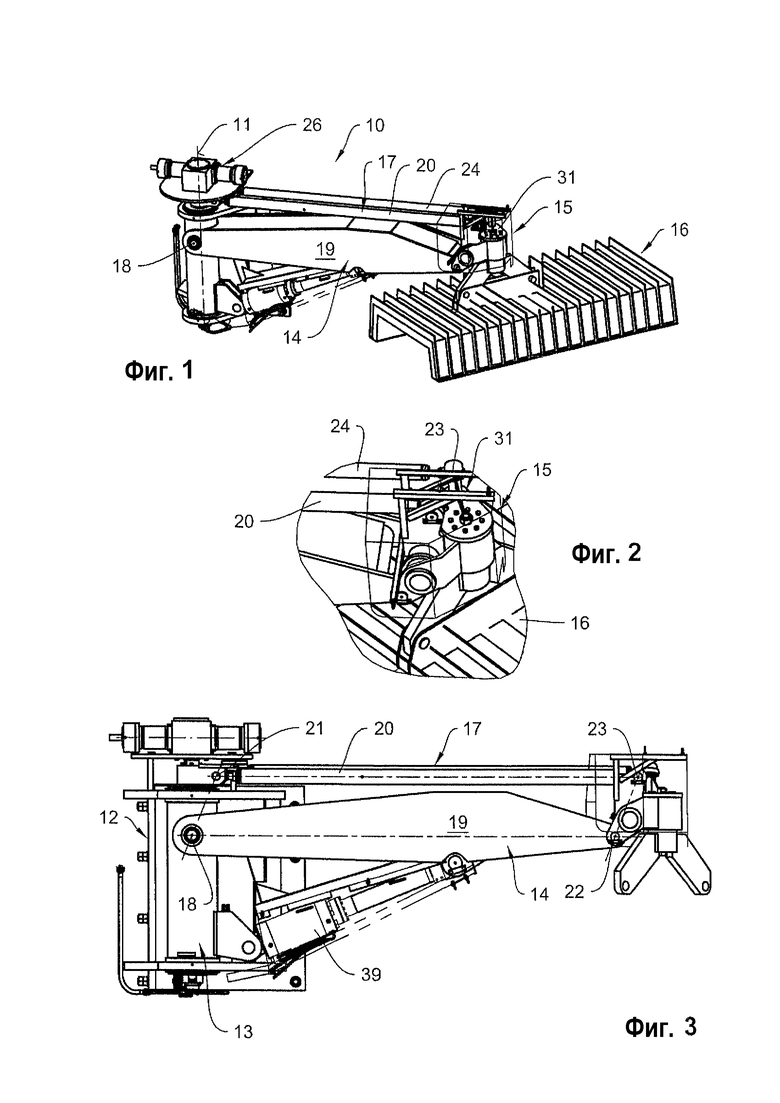
Фиг. 1 - вид манипулятора в аксонометрии;
Фиг. 2: - увеличенное изображение грузонесущего элемента манипулятора;
Фиг. 3 - манипулятор на виде сбоку;
Фиг. 4 - изображенный на фиг. 3 манипулятор в первом поворотном положении на виде сверху;
Фиг. 5 - изображенный на фиг. 3 манипулятор во втором поворотном положении на виде сверху;
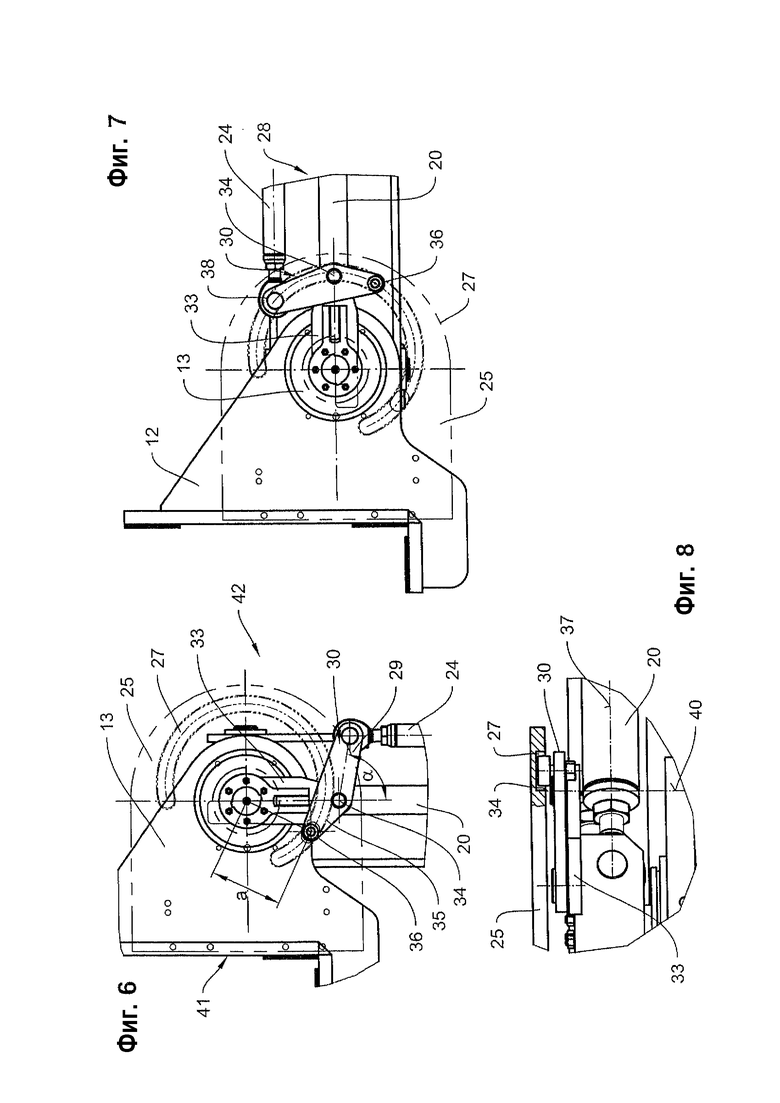
Фиг. 6 - увеличенное изображение управляющего механизма манипулятора, изображенного в поворотном положении согласно фиг. 4;
Фиг. 7 - увеличенное изображение управляющего механизма манипулятора, изображенного во втором поворотном положении согласно фиг. 5;
Фиг. 8 - увеличенное изображение управляющего механизма манипулятора, изображенного на фиг. 3.
Осуществление изобретения
На фиг. 3 показан вид сбоку манипулятора 10, изображенного в аксонометрии на фиг. 1, с установленной с возможностью вращения вокруг вертикальной оси 11 поворота на стойке 12 поворотной базой 13, снабженной подъемным рычажным механизмом 14, который на своем свободном конце содержит грузонесущий элемент 15 для соединения с крышкой 16 выпускного желоба, показанной здесь в качестве примера манипулируемого объекта.
Подъемный рычажный механизм 14 содержит подъемный шарнирный параллелограмм 17, выполненный с возможностью поворота в вертикальной плоскости и содержащий плечо 19 нагрузки, шарнирно соединенное с поворотной базой 13 посредством поворотной оси 18, и параллельную ему консоль 20, также шарнирно соединенную с поворотной базой 13 посредством поворотной оси 21. Своими концами, противоположными поворотной базе 13, плечо 19 нагрузки и консоль 20 шарнирно соединены посредством поворотной оси 22, 23 с грузонесущим элементом 15, так что, как лучше всего видно благодаря вспомогательным линиям, соединяющим поворотные оси 18 и 21, 21 и 23, 23 и 22 и 22 и 18 на фиг. 3, образуется подъемный шарнирный параллелограмм 17, делающий возможным поворотное движение в вертикальной плоскости для поднятия или опускания соединенной с грузонесущим элементом 15 крышки 16 выпускного желоба, причем грузонесущий элемент 15 двигается в параллельном направлении относительно образованного опорной базой 13 между поворотными осями 18 и 21 «неподвижного элемента» подъемного шарнирного параллелограмма 17, так что крышка 16 выпускного желоба сохраняет свою горизонтальную ориентацию во время подъемного движения.
Для осуществления подъемного движения между поворотной осью 13 и плечом 19 нагрузки предусмотрен подъемный цилиндр 39, показанный на фиг. 1 и 3.
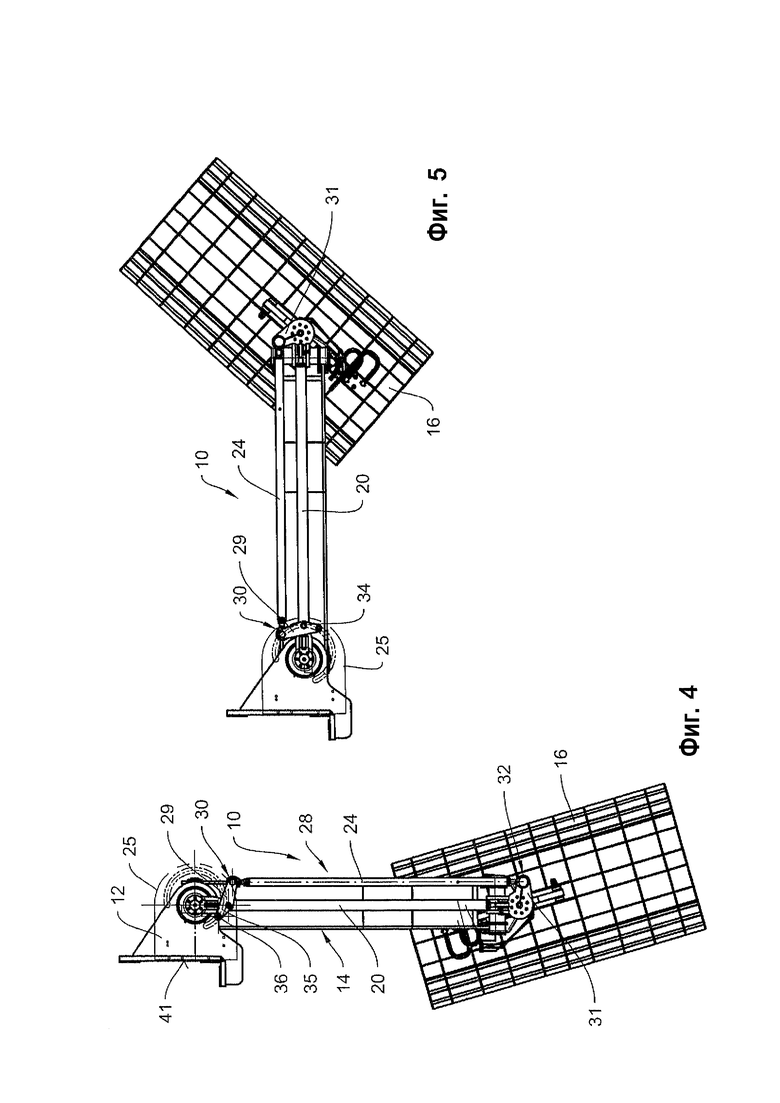
На фиг. 4 и 5 манипулятор 10 показан в двух различных поворотных положениях, причем на фиг. 4 показано первое поворотное положение, в котором соединенный с поворотной базой 13 подъемный рычажный механизм 14 ориентирован по существу параллельно выполненной на задней стороне стойки 12 монтажной пластине 41 в горизонтальной плоскости поворота, совпадающей здесь с плоскостью чертежа.
Для лучшего изображения управляющего механизма 42, который здесь воздействует на расположенную параллельно консоли 20 подъемного шарнирного параллелограмма управляющую штангу 24, управляющий диск 25 показанного на фиг. 4 и фиг. 5 манипулятора изображен прозрачным. На управляющем диске 25, который является частью стойки или жестко с ней соединен, расположено приводное устройство 26 для поворотного привода поворотной базы 13.
Как видно из фиг. 4 и фиг. 5, в показанном предпочтительном варианте осуществления манипулятора для манипулирования крышкой 16 выпускного желоба, консоль 20 и управляющая штанга 24 образуют параллельные шарнирные элементы расположенного в горизонтальной плоскости поворотного шарнирного четырехугольника, выполненного в виде поворотного шарнирного параллелограмма 28, другие параллельные шарнирные элементы которого образованы приводным плечом 29 управляющего рычага 30 и поворотным плечом 31 поворотного устройства 32 грузонесущего элемента 15.
Как видно, в частности, при совместном рассмотрении фиг. 6, 7 и 8, управляющий рычаг 30 установлен с возможностью поворота на рычажной оси 34 на поворотном несущем элементе 33, расположенном на поворотной базе 33 и жестко соединенном с ним, и образует качающийся рычаг, таким образом, что первое плечо управляющего рычага 30 образует приводное плечо рычага, а второе плечо управляющего рычага 30 образует управляющее плечо 35 рычага, которое расположенным на его свободном конце захватом 36 выходит в зацепление с направляющим пазом 27, выполненным на нижней стороне управляющего диска 25. При этом, как, в частности, показано на фиг. 8, выполненная на поворотном несущем элементе 33 рычажная ось 34 управляющего рычага находится над консолью 20, таким образом, что средняя линия 40 рычажной оси 34 пересекает продольную ось 37 консоли 20. Таким образом, между рычажной осью 34 и вертикальной поворотной осью 38 поворотного устройства 32 грузонесущего элемента 15 кинематически образуется неподвижный элемент расположенного в горизонтальной плоскости поворотного шарнирного параллелограмма 28.
Как видно, в частности, при совместном рассмотрении фиг. 7 и 8, управляющий механизм 42 в качестве своих существенных составных частей содержит поворотный несущий элемент 33, неподвижно соединенный с поворотной базой 13 и потому выполненный с возможностью вращения вместе с поворотной базой 13, направляющий элемент, выполненный в виде направляющего паза 27, расположенный на стойке 12 или на установленном на стойке 12 без возможности вращения управляющем диске 25, и управляющий рычаг 30, шарнирно соединенный с поворотным несущим элементом 33 посредством рычажной оси 34. При этом, как показано на фиг. 7, управляющая штанга 24 соединена с приводным плечом 29 рычага посредством вращательного шарнира 38, выполненного в данном случае в виде шаровой головки, так что подъемное движение подъемного рычажного механизма 14, то есть, поворот подъемного шарнирного параллелограмма 17 в вертикальной плоскости, не приводит к возникновению ограничений во вращательном шарнире 38. Поворот поворотного устройства 32 поворотного несущего элемента 33, вызывающий соответствующий поворот крышки 16 выпускного желоба, также предусмотрен только при расположении поворотного шарнирного параллелограмма 28 в горизонтальной плоскости.
Как лучше всего видно из фиг. 4 и 5, для поворота поворотного плеча 31 поворотного устройства 32 грузонесущего элемента 15 приводное плечо 29 рычага, образованное первым плечом управляющего рычага 30 воздействует на поворотное плечо 31 поворотного устройства 32 посредством перемещаемой параллельно консоли 20 управляющей штанги 24. Поворотное движение приводного элемента 29 происходит за счет поворота управляющего плеча 35 управляющего рычага 30 вокруг рычажной оси 34. Поворотное движение управляющего плеча 35 рычага происходит за счет относительного движения захвата 36 в направляющем пазу 27 во время поворота поворотной базы 13 вокруг вертикальной поворотной оси 11 в направляющем пазу 27. Таким образом, посредством управляющего механизма 23, приведенного в действие за счет поворотного движения поворотной базы 13, происходит относительное вращение крышки 16 выпускного желоба, соединенной с поворотным устройством 32 грузонесущего элемента 15, по отношению к подъемному рычажному механизму 14, так что вращение поворотного устройства 32 грузонесущего элемента 15 в горизонтальной плоскости накладывается на поворотное движение соединенного с поворотной базой 13 подъемного рычажного механизма 14 в горизонтальной плоскости, причем угол α параллелограмма, образованный между приводным плечом 29 рычага, образующим приводной элемент поворотного шарнирного параллелограмма 28, и плечом 19 нагрузки зависит от расстояния а между захватом 36 и вертикальной поворотной осью 11.
Хотя в показанном варианте осуществления направляющее устройство 27 выполнено в виде части окружности со смещенным относительно вертикальной поворотной оси 11 центром, направляющее устройство 27 или выполненная в данном случае в виде направляющего паза кривая управления управляющего механизма 42 может иметь неравномерную траекторию с изменяющимися радиусами кривизны, которая может быть определена в соответствии с желаемым относительным движением грузонесущего элемента 15 по отношению к подъемному рычажному механизму 14, причем грузонесущий элемент 15 также может осуществлять последовательные противоположные вращательные движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| ГРУЗОВОЙ ВАГОН С ОТКИДНЫМИ БОКОВЫМИ СТЕНКАМИ ВАГОНА | 2013 |
|
RU2645550C2 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| МЕХАНИЗМ ДЛЯ ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА | 2011 |
|
RU2456227C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| Манипулятор | 1986 |
|
SU1324843A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах для поворачивания манипулируемого объекта. Манипулятор содержит стойку с поворотной в горизонтальной плоскости базой вокруг вертикальной поворотной оси посредством приводного устройства. Поворотная база содержит консоль с грузонесущим элементом на свободном конце для соединения с объектом. Грузонесущий элемент содержит поворотное устройство для поворота объекта в горизонтальной плоскости. Предусмотрена управляющая штанга, проходящая от стойки до поворотного устройства, одним концом шарнирно соединенная с поворотным устройством грузонесущего элемента, а другим концом - со стойкой посредством управляющего механизма с обеспечением при поворотном движении поворотной базы посредством управляющего механизма и управляющей штанги поворотного движения грузонесущего элемента, наложенного на поворотное движение базы. 13 з.п. ф-лы, 8 ил.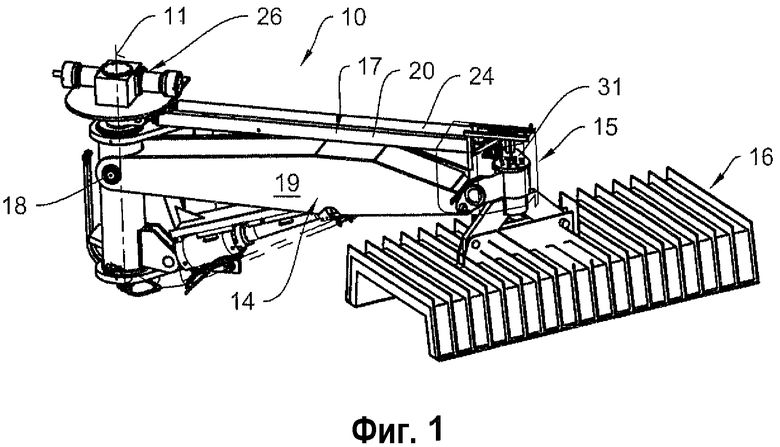
1. Манипулятор (10) для поворачивания манипулируемого объекта, содержащий стойку (12) с поворотной базой (13), выполненной с возможностью поворота в горизонтальной плоскости вокруг вертикальной поворотной оси (11) посредством приводного устройства (26) относительно стойки (12), причем поворотная база содержит консоль (20) с расположенным на свободном конце консоли (20) грузонесущим элементом (15) для соединения с манипулируемым объектом, причем грузонесущий элемент (15) содержит поворотное устройство (32) для поворота манипулируемого объекта в горизонтальной плоскости,
причем для образования в горизонтальной плоскости поворотного шарнирного четырехугольника, включающего в себя консоль (20), предусмотрена управляющая штанга (24), проходящая от стойки (12) до поворотного устройства (32), одним концом шарнирно соединенная с поворотным устройством (32) грузонесущего элемента (15), а другим концом шарнирно соединенная со стойкой (12) посредством управляющего механизма (42) так, что при поворотном движении поворотной базы (13) посредством управляющего механизма (42) и управляющей штанги (24) предусмотрено осуществление поворотного движения грузонесущего элемента, наложенного на поворотное движение базы.
2. Манипулятор по п. 1, отличающийся тем, что управляющий механизм (42) содержит выполненное на стойке (12) направляющее устройство, взаимодействующее с расположенным на поворотной базе (13) управляющим рычагом (30), шарнирно соединяющим управляющую штангу (24) с направляющим устройством.
3. Манипулятор по п. 2, отличающийся тем, что направляющее устройство определяет кривую управления, вдоль которой предусмотрено проведение управляющей головки управляющего рычага (30).
4. Манипулятор по п. 3, отличающийся тем, что кривая управления выполнена в виде направляющего паза (27), в зацепление с которым входит управляющая головка, выполненная в виде захвата (36).
5. Манипулятор по одному из пп. 2-4, отличающийся тем, что направляющее устройство выполнено в виде соединенного со стойкой (12) управляющего диска (25).
6. Манипулятор по одному из пп. 2-5, отличающийся тем, что управляющий рычаг (30) выполнен в виде качающегося рычага с зафиксированной на поворотной базе (13) рычажной осью (34) для поворотной установки управляющего рычага (30) в плоскости поворота, параллельной плоскости направления направляющего устройства, причем первое плечо управляющего рычага образует управляющее плечо (35) рычага, конец которого посредством управляющей головки входит в зацепление с направляющим устройством, а второе плечо рычага, будучи приводным плечом (29) рычага, образует приводной элемент поворотного шарнирного четырехугольника.
7. Манипулятор по п. 6, отличающийся тем, что рычажная ось (34) расположена над консолью (20) на поворотной базе (13) и пересекает продольную ось (37) консоли (20).
8. Манипулятор по одному из пп. 2-7, отличающийся тем, что управляющий механизм (42) содержит поворотный несущий элемент (33), соединенный с поворотной базой (13), направляющее устройство, соединенное со стойкой (12), и управляющий рычаг (30), соединенный с поворотным несущим элементом (33) посредством рычажной оси (34).
9. Манипулятор по одному из пп. 1-8, отличающийся тем, что для образования подъемного рычажного механизма (14), содержащего выполненный в вертикальной плоскости подъемный шарнирный параллелограмм (17), консоль (20) шарнирно установлена на поворотной базе (13) посредством поворотной оси (21) и расположена параллельно плечу (19) нагрузки, шарнирно установленному на поворотной базе (13) посредством поворотной оси (18), причем консоль (20) и плечо (19) нагрузки шарнирно соединены своими концами, противоположными поворотной базе (13), посредством грузонесущего элемента (15).
10. Манипулятор по п. 9, отличающийся тем, что для образования поворотного шарнирного четырехугольника в виде поворотного шарнирного параллелограмма (28) консоль (20) расположена параллельно управляющей штанге (24).
11. Манипулятор по п. 9 или 10, отличающийся тем, что поворотная ось (21) консоли (20) предпочтительно выполнена вместе с рычажной осью (34) управляющего рычага (30) на поворотном несущем элементе (33).
12. Манипулятор по одному из пп. 1-11, отличающийся тем, что приводное устройство (26) служит как для поворота подъемного рычажного механизма (14), так и для поворота поворотного устройства (32) грузонесущего элемента (15).
13. Манипулятор по п. 12, отличающийся тем, что приводное устройство (26) расположено на направляющем устройстве.
14. Манипулятор по одному из пп. 3-13, отличающийся тем, что кривая управления определяет последовательность точек управления, расстояние а до которых от вертикальной поворотной оси (11) поворотной базы (13) определяет угол α параллелограмма, образованный между приводным элементом и неподвижным элементом поворотного шарнирного параллелограмма (28).
| Пептиды с антибактериальной активностью | 2023 |
|
RU2811267C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Манипулятор | 1983 |
|
SU1304741A3 |
| Манипулятор | 1984 |
|
SU1217652A1 |

