иовешивания исполпитштььгого органа. .Идя этого противовес 10, уряпнове- шиваю11 1Й рычаж1 ую С1 стему 8, 6, 9, захватный орган и массу груза, шар- нирно связан со эвеном 5 и представляет собой звено дополнительного
-
Изобретение относится к подъемно- транспортному машиностроению,, а именно к сбалансированным магтипулято рам,с ручным управлением, и может найти применение на операциях пере грузки тяжелых: изделий.
Цель изобретения - снижение энергозатрат за счет повьпчения точности уравновешивания исполнительного органа ,
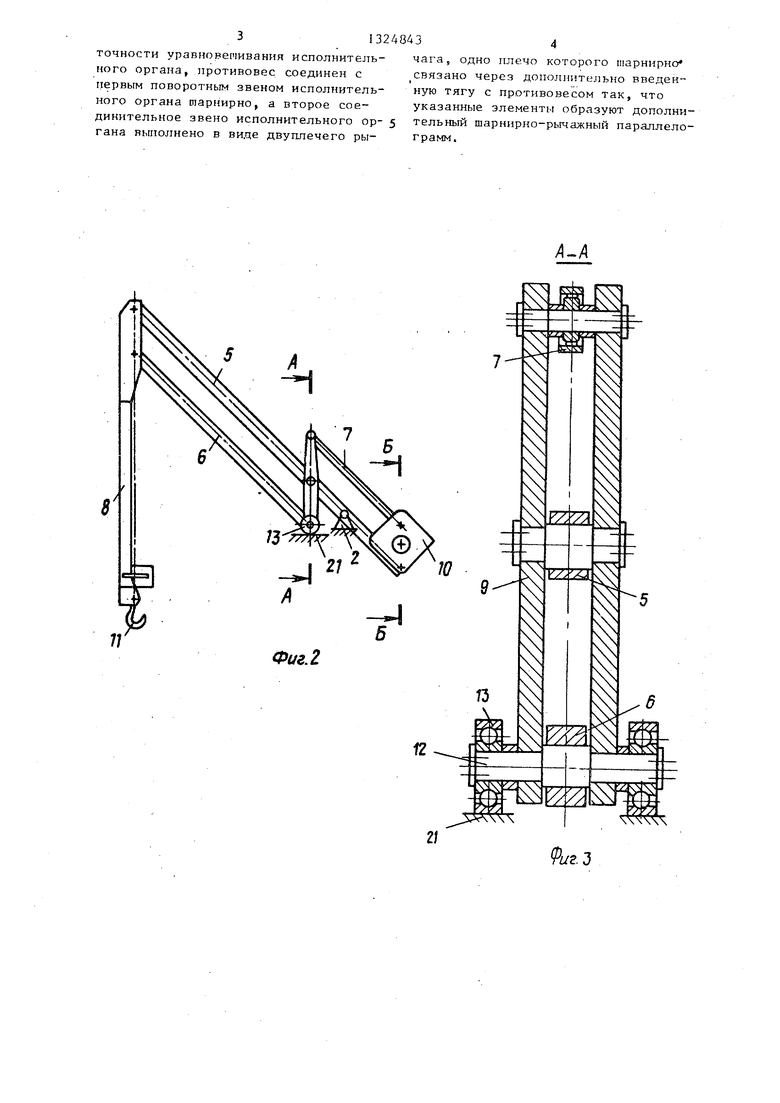
На фиг,i изображен предлагаемый манипулятор, общий вид; на фиг.2 - кинематическая схема шарнирных парал лелограммов; на фиг.З - разрез А-А на фиг,2; на фиг.4 разрез Б-Б на фиг„2,
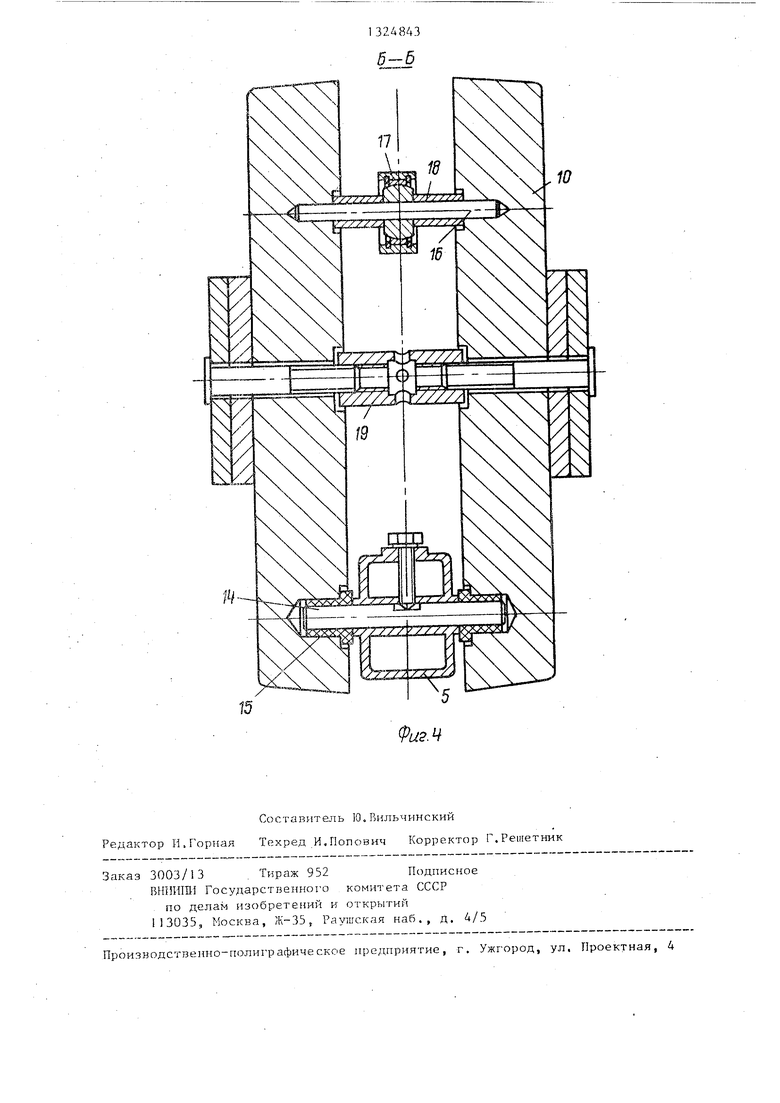
Манипулятор содержит установлен- nyio на основании новоротную стойку 2 с корпусом 3, исполнительный орган выполненный в виде двух шарнирно-ры- чшкных параллелограммов с и смонтиро- ваннь й на стойке силовой цилиндр 4 привода,, iuTOK которого связан с корпусом. Рычажная система исполнительного органа содержит поворотные звенья 5 и 6, тягу 7 и соединительные звепья 8-10, Звено 5 шарнирно связано со стойкой 2, На звене 8 смонтирован захватный орган 11, Звенья 9 В,июлнены в виде двуплечих рычагов причем на оси 12 шарнира, соединяющего звенья 6 и 9, смонтированы ролики 3 Звено 10 выполнено в виде противовеса, состоящего из наборных .элементовJ соединенных со звеном 5 Посредством оси 14 и втулок 15, с тдт ой 7 - посредством оси 6 подшипника Г 7 и pacnopHbix втулок 18, а мех собой -- посредством стяжки 19.
В корпусе 3 выполнены вертикальные 20 и горизонтальные 2i нанравляю .щиеJ причем в направляющих 20 разме- п еиы ролики 22, смонтированные на
3248АЗ
шарнирно-рычажного параллелограмма, образованного, кроме указанных элементов, двуплечим рычагом 9 и регу- лируем(:1Й по длине тягой 7, что нозво- ляет повысить точность уравновеганва- ния. Д ил.
5
Ш
; , -
f5
20
25
30
35
40
поворотной стойке 2, а в направляющих 21 - ролики 13,
Манипулятор работает следующим образом.
Подъем груза захватным органом 1 осуществляется включением силового цилиндра 4, шток которого выдвигается и перемещает корпус 3 вдоль стойки 2. Поворот груза вокруг оси основания 1 и радиальное перемещение груза осуществляются оператором вручную. Выполнение противовеса 10 в виде звена параллелограмма позволяет более точно уравновешивать рычажную систему с грузом, расноложеньсые по другую сторону от оси стойки 2, поэтому уменьшается усилие радиального пере- мещения груза, Стяжка 19 создает дополнительное трение между торцами втулок 15 и звеном 5, что предотвращает самопроизвольное радиальное перемещение груза.
Формула изобретения
Манипулятор, содержащий основание, установленную на нем поворотную стойку, корпус, смонтированный на стойке с возможностью перемещения вдоль ее оси и снабженный горизонтальными направляющими, исполнительный орган вьшолненный в виде шарнирно-рычажного параллелограмма, первое из пово- .ротных звеньев которого атарнирно связано со стойкой и снабжено противовесом, а первое из соединительных его звеньев снабжено захвато, при этом на оси шарнира, соединяющего вторые поворотное и соединительное звенья, смонтированы ролики, размещенные в горизонтальных направляющих корпуса, и привод, отличаю- щ и и с я тем, что, с целью снижения энергозатрат за счет повьшгения
точности уравновепивання исполнительного органа, противовес соединен с rjepBbiM поворотным звеном исполнительного органа шар({ирно, а второе соединительное звено исполнительного ор- гана выполнено в виде двуплечего ры434
чага, одно плечо которого шарнирно связано через дополнятильно введенную тягу с противовесом так, что указанные элементы образуют дополнительный шарнирно-рьиажный параллелограмм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| Манипулятор | 1984 |
|
SU1263522A1 |
| Манипулятор | 1986 |
|
SU1313695A1 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Сбалансированный манипулятор | 1989 |
|
SU1673432A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Транспортное средство для перевозки длинномерных грузов | 1985 |
|
SU1299859A1 |
| Манипулятор | 1985 |
|
SU1341015A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2176950C2 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к сбалансированным манипуляторам с ручным управлением, и может найти применение на операциях перегрузки тяжелых изделий. Целью изобретения является cHtraceHHe энергозатрат за счет повышения точности уравсл
/ь
Й/гЗ
32Д843
6-5
10
U5.4
| Козырев Ю.Г, Промьшленные роботы | |||
| Справочник | |||
| - М.: Машиностроение,1983, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
