113
Изобретение относится к весоизмерительной технике, а именно к весам для взвешивания транспортных средств в статическом состоянии и к товарным весам.
Целью изобретения является упрощение конструкции.
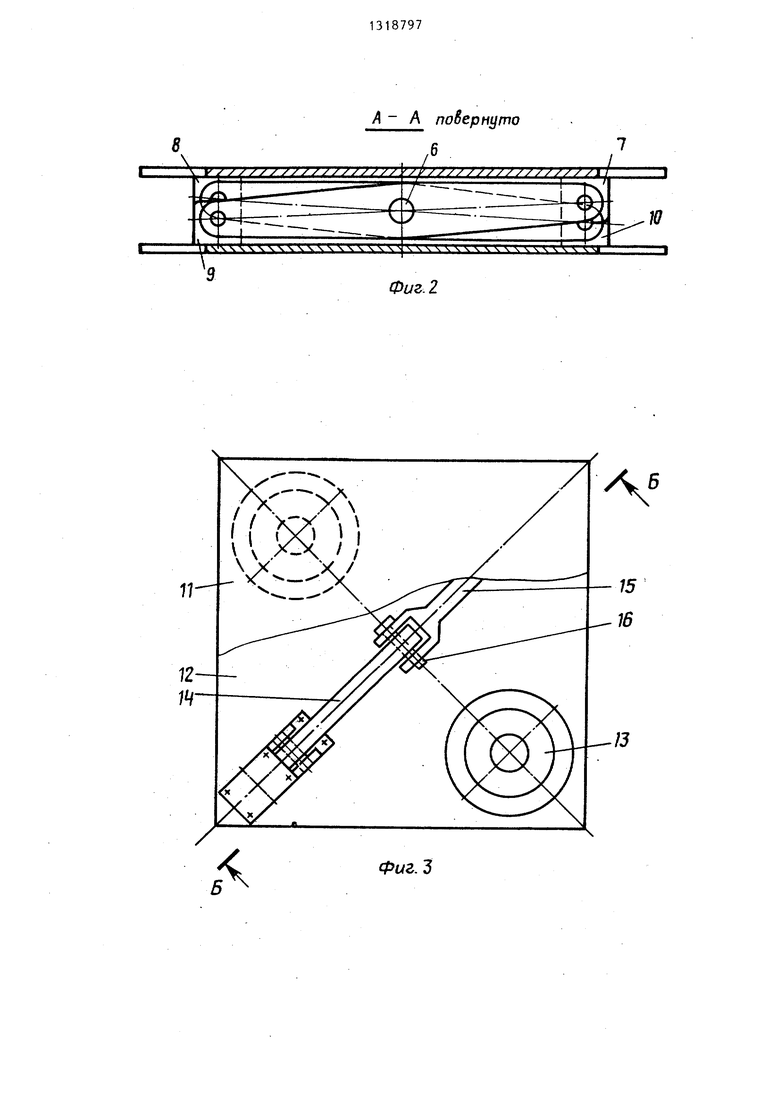
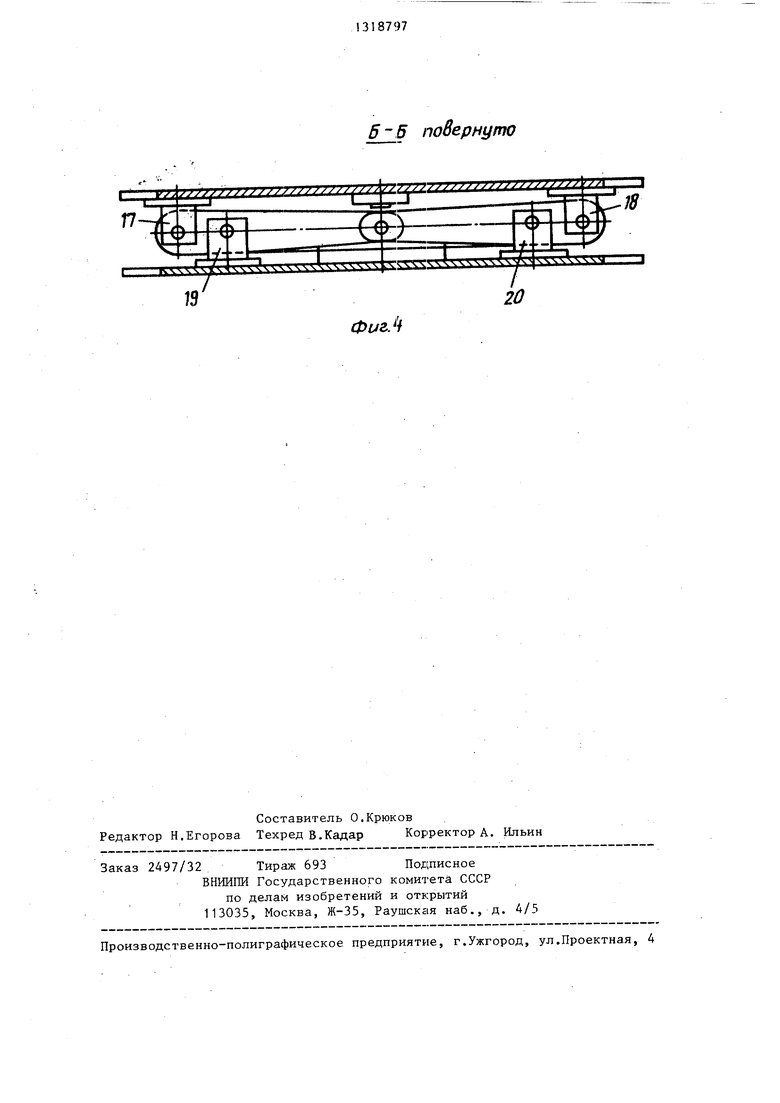
На фиг. 1 схематично показано грузоподъемное устройство, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вариант исполнения устройства, вид сверху; на фиг. 4 - разрез В-Б на фиг. 3.
Устройство (фиг. 1 и 2) содержит платформу 1 и основание 2. Платфор- ма 1 взаимодействует с тензодатчи- ком 3 и стабилизирующим устройством, состоящим из рычагов 4 и 5, соединенных осью 6 между собой и с платформой и основанием - посредством пла- вающих шарнирных опор 7-10.
Устройство, изображенное на фиг. 3 и 4, содержит платформу 11 и основание 12. Платформа 11 взаимодействует с тензодатчиком 13 и стабилизи- рующим устройством, СОСТОЯ11ЩМ из рычагов 14 и 15, соединенных между собой осью 16, ас платформой и основанием - посредством плавающих шарнирных опор 17-20.
Грузоподъемное устройство работает следующим образом.
При наезде колеса транспортного средства происходит взвешивание независимо от места приложения нагрузки. При симметричном наезде рычаги 4 и 5, свободно перемещаясь на плавающих опорах, стабилизируют платформу от качания.
При наезде колеса транспортного средства на край платформы 1 возникает усилие, стремящееся опрокинуть платформу. При этом верхний конец рычага 4. с опорой 7 опускаются вниз, поворачиваясь вокруг опоры 9 через
72
ось 6. Действующее вниз усилие передается рачагу 5 и опоре 8, закрепленной на противоположном конце платформы. Таким образом, при возникновении опрокидывающего момента на одном конце платформы на ее другой конец через систему рьтагов передается восстанавливающий момент, равный по значению опрокидывающему.
Грузоподъемное устройство (фиг.З и 4) работает следующим образом.
При наезде колеса транспортного средства на платформу 11 может возникнуть усилие, опрокидывающее платформу. При этом платформа 17 стремится опуститься, вниз, поворачивая вокруг опоры 19 рычаг 14. Через ось 16 действующее вверх усилие передается на рычаг 15, поворачивая его вокруг опоры 20, при этом опора 18 пермещается вниз, создавая ,восстанавливающее усилие.
Формула изобретения
Устройство тензометрических весов, содержащее грузоприемную платформу и раму, между которыми расположены весоизмерительные датчики и рычажное устройство, выполненное в виде по крайней мере одной пары шарнирно скрепленных рычагов, каждый из которых одним концом шарнирно связан с грузоприемной платформой, а другим концом посредством плавающего шарнира - с рамой, и измерител ь- но-кнформационный блок, связанный с датчиками, отличающееся тем, -что, с целью упрощения конструкции, рачажная система расположена вдоль одной из диагоналей грузоприемной платформы, а весоизмерительные датчики расположены на другой диагонали весоизмерительной платформы.
А - fi повернуто
6
Фиг 2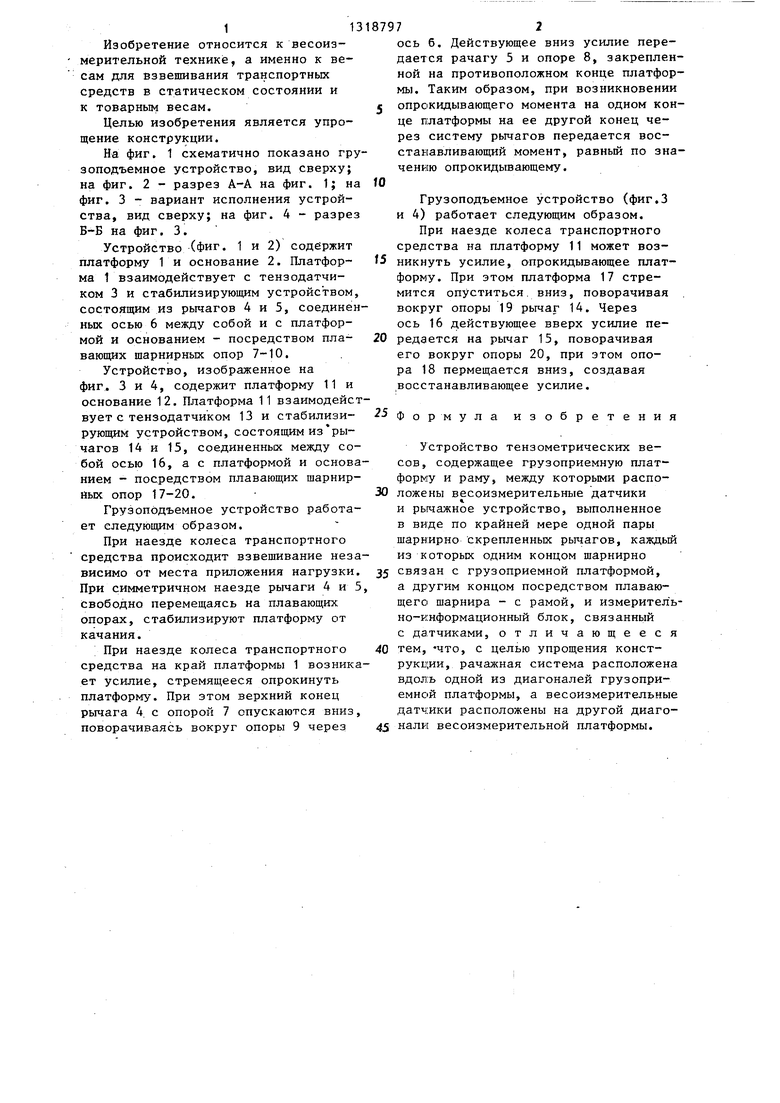
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ДВИЖЕНИИ | 1992 |
|
RU2046299C1 |
| Бесфундаментные переносные весы | 1989 |
|
SU1719918A1 |
| Весы для взвешивания транспортных средств | 1985 |
|
SU1303839A1 |
| Весы для определения нагрузок на оси транспортного средства | 2020 |
|
RU2730375C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| Весы для взвешивания транспортных средств в движении | 1985 |
|
SU1267167A1 |
| Устройство для взвешивания транспортных средств | 1988 |
|
SU1585688A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2263288C2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ПРОКАТА | 2004 |
|
RU2277231C2 |
| Грузоприемное устройство платформенных весов | 1984 |
|
SU1247666A1 |
Изобретение относится к весоизмерительной технике и позволяет упростить конструкцию устройства. Вдоль одной из диагоналей грузоприемной платформы 1 размещены весоизмерительные датчики 3, а по другой диагонали расположена система рычагов 4,5. При симметричном наезде на платформу 1 колеса транспортного средства свободно перемещающиеся на плавающих опорах рычаги 4, 5 стабилизируют платформу от качания. Возникающий при наезде на край платформы опрокидывающий момент компенсируется передающимся через систему рычагов 4,5 восстанавливающим моментом. 4 ил. (Л
Фиг. 5
6-5 повернуто
ff.rfffjTfJr r f ffMHf rMaWf fA fJfJfM f f f п
ФигМ
