113187982
Изобретение относится к )бласти Под действием падающего груза на весоизмерительной техники,упругую платформу 5 она приводится
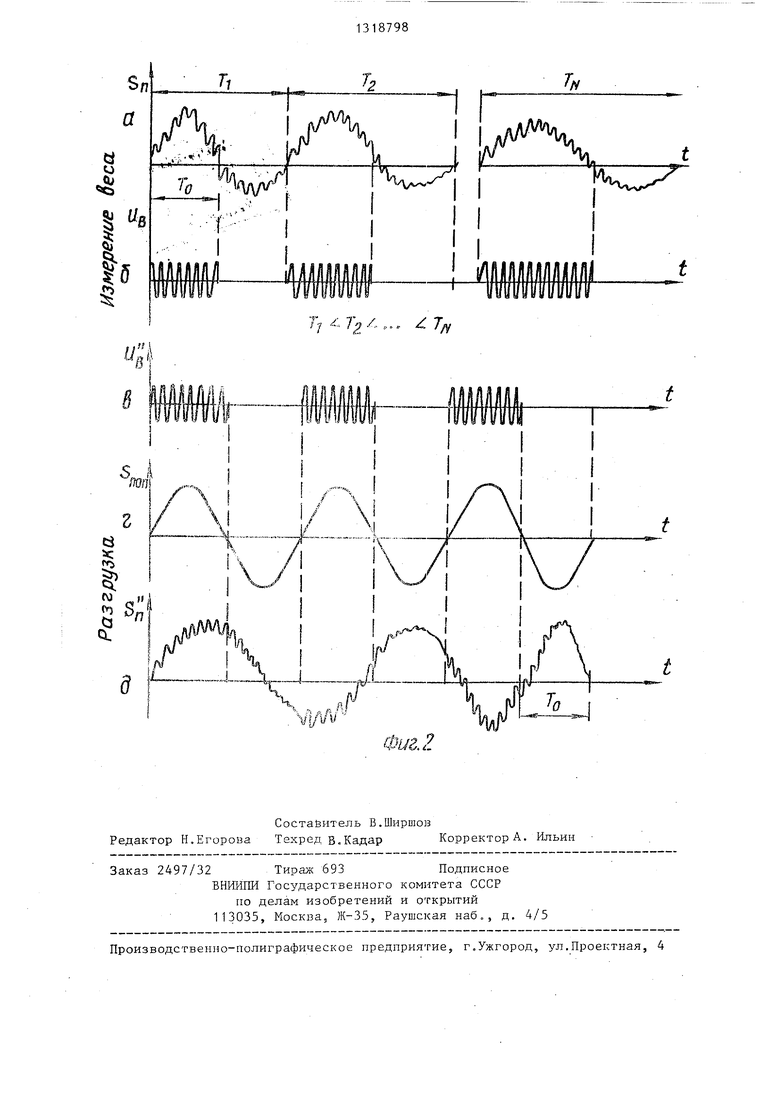
Цель изобретения - повьшение 6bict-. в колебательное движение, частота ко- родействия разгрузки.торого определяется массой и жестНа фиг. 1 показана схема йесово- стъю платформы и массой груза. го порционного-Дозатора; на фиг. 2 - По мере увеличения массы граза на графики, поясняющие его работу, где платформе 5 частота ее колебаний t - вертикальное движение платфор- уменьщается. Одновременно с высьта- мы при отвешивании груза; 6- высоко- нием груза 7 на площадку 6 платфор- частотное возбуждение платформы при fO приводится в высокочастотное отвешивании груза; в - то же, при (0,5-1 кГц) колебательное движение разгрузке; т, - горизонтальное низко- . при помощи вибровозбудителя 9, получастотное движение каретки (платфор- чающего питание от генератора высо- мы) при разгрузке; в- вертикальное кой частоты 11. Создаваемое электродвижение платформы при разгрузке. 15 магнитом вибровозбудителя 9 магнит- Весовой порционный дозатор содер- ное поле взаимодействует с магнитной жит прикрепленную к корпусу 1 обмот- пластинкой 10 и через нее приводит ку электромагнита 2, подвршную карет- платформу 5 в вынужденное колебатель- ку 3, жестко соединенную с якорем 4 ное движение, состоящее из двух сос- электромагнита 2, консольно закреп- 20 тавляющих гармоник: возбуждающей и ленную на каретке 3 грузоприемную собственной (фиг. 2 ). При этом нали- платформу 5, которая выполнена в аи- чие высокочастотной возбуждающей сос- де упругого элемента с площадкой б тавляющей обеспечивает более высокую для размещения груза 7. К платформе 5 . амплитуду суммарного движения, а прикреплен частотный датчик 8 веса, 25 также меньший коэффициент затухания а высокочастотные колебания ей со- собственных колебаний, что помогает общаются при помощи электромагнитного увеличить точность определения массы, вибровозбудителя 9, закрепленного на Для того, чтобы система - платформа 5 каретке 3 и взаимодействующего с маг- грузом 7 имела движение с более вы- нитной пластинкой 10, прикрепленной 30 Ргженным собственным движением, а не к платформе 5.возбуждающим высокочастотным, высокоДозатор содержит также генера1Х)р частотное возбуждение обеспечивается 11 высокой частоты, генератор 12 низ- импульсами, длительность которых сокой частоты, фильтр 13 и блок 14 уп- ответствует около 0,5 периода соб- равления, причем к выходу генерато- 35 ственной частоты (фиг. 2б).
ра 11 высокой частоты подключен элект- Возникающие суммарные колебания ромагнитный вибровозбудитель 9, к вы- восгфинимаются частотным датчиком 8 ходу генератора 12 низкой частоты веса (массы) сигнал которого пода- подключена обмотка электромагнита 2, ется через фильтр 13 в блок 14 уп- входы генераторов 11 и 12 соединены 40 равления. По полученному низкочастот- соответственно с вторым и третьим вы- ному сигналу блок 14 управления син- ходами блока 14 управления, вход хронизирует подачу (включение) от ге- фильтра 13 соединен с частотным дат- нератора 11 высокочастотного сигнала чиком 8 веса, выход - с входом бло- к вибровозбудителю 9. Блок 14 управ- ка 14 управления, первый выход кото- 45 ления настроен на такую частоту, ко- рого подключен к питателю 15. Подача торая соответствует необходимому ко- взвешиваемого груза 7 осуществляется личестбу груза. Как только масса гру- от питателя 15, размещенного над плат- за 7, находящегося на плои;адке 6, формой 5, а его разгрузка производит-- станет равной заданной, частота колеся в приемный бункер 16, установлен-- 50 баний платформы 5 через фильтр 13 по- ный под площадкой 6 платформы 5. ступит на блок 14 управления, который
Весовой порционный дозатор рабо- формирует сигналы, один из которых тает следующим образом.отключает питатель 15, а другой вклюОтвешиваемый груз 7 из питателя 15 чает генератор 12 низкой частоты. высыпается на площадку 6 упругой 55 Запуск генератора 12 низкой частоты грузоприемной платформы 5. Управление синхронизируется с началом подачи им- питателем 15, обеспечивающим грубое пульсов высокочастотного сигнала.
и точное дозирование, осуществляется Сигнал генератора 12 низкой частоты блоком 14. подается в обмотку электромагнита 2,
313
который через якорь 4 приводит карет ку 3 в колебательное синусоидальное движение низкой (50-100 Гц) частоты. Сигнал высокой частоты в вибровозбудитель 9 подается только один полупе риод по отношению к низкочастотному сигналу питания электромагнита 2 (фиг. 2в,г), когда каретка при колебательном движении уходит от приемно го бункера 16 груза. В зтот промежуток времени из-за высокоч-чстотных вертикальных колебаний платформы 5 (площадки 6) сила трения между ней и грузом 7 уменьшается, что вызывает проскальзывание груза 7 и перемещение его по площадке в сторону переднего ее края (направо по чертежу). При втором полупериоде движения груз перемещается вместе с площадкой. При последующих низкочастотных возвратно поступательных движениях каретки 3 с платформой 5 груз 7 соскальзывает с ее площадки 6 и падает в- приемный бункер 16.
Во время разгрузки частотным датчиком 8 веса измеряется частота собственных колебаний платформы, которая 1ри этом увеличивается (масса, уменьшается).
87984
: Разгрузка прекращается по команде с блока 14 управления, которая вьфабаты- вается в момент,когда частота колебаний платформы 5 станет равной заданной,
5 соответствугацей отсутствию груза.
Формула изо. Весовой порционный дозатор, содержащий питатель, расположенную под ним грузоприемную платформу в виде кон- 10 сольно закрепленного упругого элемента, на котором установлен частотный датчик веса, корпус, вибровозбудитель, подключенный к выходу генератора высокой частоты, фильтр, вход ко- /5 торого соединен с частотным датчиком веса, а выход подключен к блоку управления, один выход которого соеди- нен с питателем, а другой - с входом генератора высокой час 4 оты, о т л и20 чающийся тем, что, с целью повьш1ения быстродействия разгрузки, в него введены каретка, электромагнит и генератор низкой частоты, причем обмотка электромагнита закрепле- 25 на на корпусе, а якорь электромагнита, вибровозбудителя и грузоприемная платформа - на каретке, вход генератора низкой частоты соединен с третьим выходом блока управления, а выход подключен к обмотке электромагнита.
,... /:7
Ч/-- I
j.t.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вибрационного транспортирования дискообразного объекта | 1987 |
|
SU1467000A1 |
| Способ весового порционного дозирования сыпучих материалов | 1989 |
|
SU1659740A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| Способ весового порционного дозирования рыбы и устройство для его осуществления | 1975 |
|
SU547644A1 |
| СЕПАРАТОР | 2006 |
|
RU2325235C1 |
| Устройство для порционного взвешивания | 1976 |
|
SU591714A1 |
| Способ вибрационного транспортирования и устройство для его осуществления | 1982 |
|
SU1022895A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Устройство для взвешивания движущихся объектов | 1978 |
|
SU731304A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить быстродействие разгрузки. Устройство содержит питатель 15, под ним консольно закрепленную упругую грузоприемную платформу 5 с частотным датчиком 8 измерения частоты ее колебаний, вибровозбудитель 9, генератор 11 высокой частоты и фильтр 13, За счет того, что устройстве снабжено кареткой 3, на которой закреплена вибрируемая платформа 5, электромагнитом 2 и генератором 12 низкой частоты, обеспечивается поперечное колебательное возвратно-поступательное движение платформы 5 для вибротранспортирования насыпанного на нее груза 7 по площадке 6 до его разгрузки в приемный бункер 15, 2 ил. с (Л СО СХ СО 00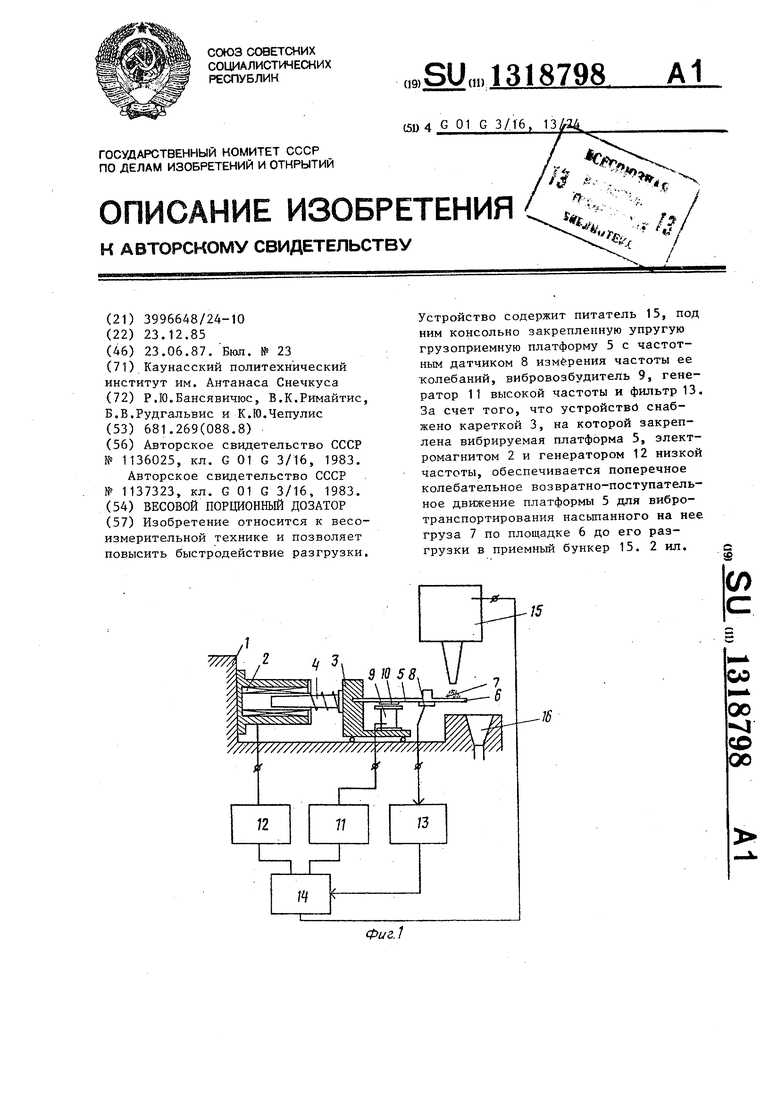
Составитель В.Ширшов Редактор Н.Егорова Техред В.Кадар Корректор А. Ильин
Заказ 2497/32 Тираж 693Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Устройство для измерения массы | 1983 |
|
SU1136025A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
