Изобретение относится к области весоиз мерительной техники и предназначено для автоматического порционного дозирования различных материалов, например комбякормов в потоке. Известны устройства для порционного взвешивания различных материалов, содержащие весы с коромыслом, покояшимся во время отвешивания доз одним плечом на неподвижной опоре, бункер и путевые выклю чатепи ij. В этих устройствах после заполнения бункера до предварительного веса коромысло упирается в грузик, лежащий на станине и далее перемешаемый вместе с коромыслом.Однако введение грузика в известные порционные дозаторы приводит к снижению надежности в работе из-за возникновения периодических колебатшй весовой системы при захвате грузика и снижению точности взвешивания. Наиболее близким по технической сущности и достигаемому результату к изоб-; ретению является устройство содержащее платформеннью весы с датчиком положения коромысла, двухскоростной питатель с выг, рузной горловиной,. грузоприемный бункер, задатчик величинь досыпки и исполнительный механизм 2. Такое устройство сложно и не обеспечивает достаточную надежность работы, поскольку электромагнит задатчика величины досыпки в течение дли тельного времени работает с зазором, что приводит к его перегреву и завышенному потреблению электроэнергии. В известном устройстве в случае увеличения дозируемых порций требуется электромагнит крайне большого веса, габаритов и стоимости. Поскольку магнитная система электромагнита разомкнута, его остаточный магнетизм может влиять на точность взвешивания. Целью изобретения является повышение надежности работы устройства. Эта цель достигается тем, что задатчик величины досыпки вьшолнен в виде взаимодействующего с исполнительным механизмом рычага, ось врашения которого соединена с основанием весов, и снабженного стойкой, опирающейся на платформу весов.
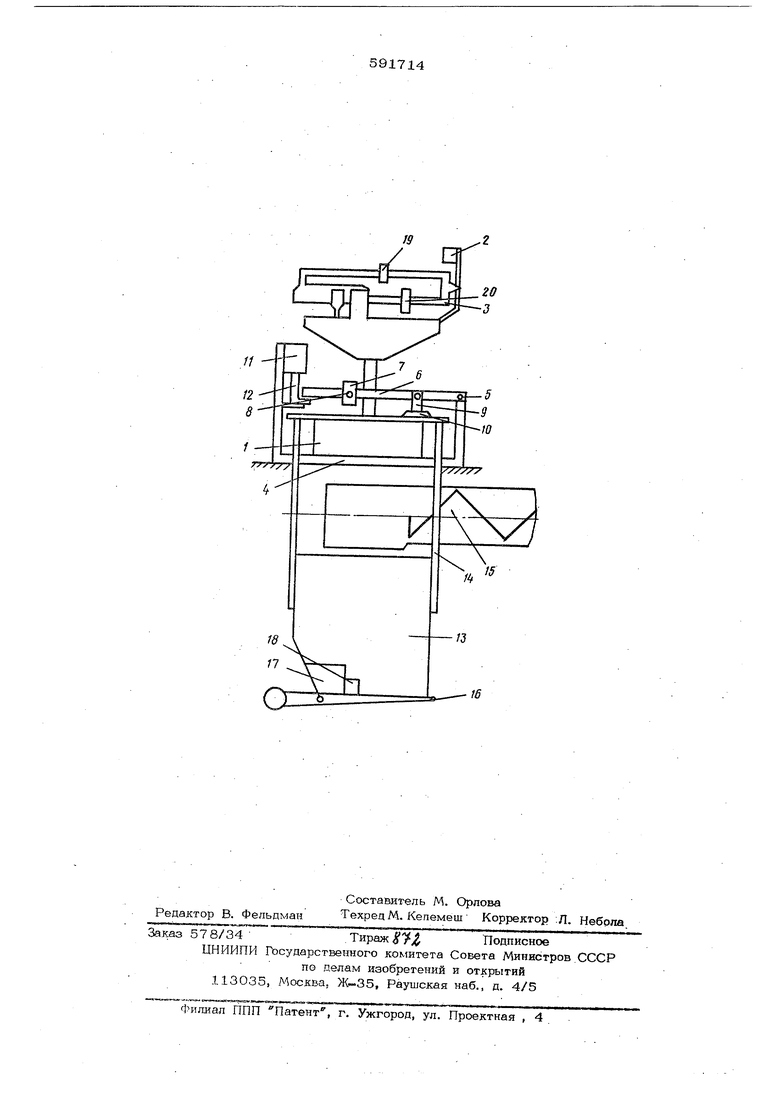
Изобретение поясняется чертежом, иа котором схематичесш изображено устройство для порционного взвешивания,
Устройство содержит плач-форменные БВ-. сы 1 с датчиком положения 2 KopoNibiCjia 3, установленные на неподвижной раме 4, на которой укреплена также ось вращения 5 рычага 6. Рычаг снабжен гирей 7, фшсснруб мой винтом 8, и опирается стойкой 9 на упор 10, укрепленный на платформе весов. .Укрепленный на раме исполнительньгй меха.--. низм 11 своим штоком 12 может поднимагЕ и опускать свободный конец рычага 6.
Грузоприемный бункер 13 подвешен к платформе весов снизу посредством четырех тяг 14, а питатель 15, оборудовагтъгй двуХскоростным приводом, и его выгрузная rcip ловина расположены между весами и 6унке ром. Открывание и закрывание днюда 16 бункера осуществляется исполнительным механизмом 17. Положение днгпда 16 бункера контролируется путевым датчиком 18. Дат-чики 2 и 18, исполнителыЕые механизмы 11 и 17 и привод питателя 15 подключены к схеме управления (на чертеже не показано), обеспечивающей автомагическую работу устройства.
Устройство работает следующим образом. Перед иачалокг работы передвижепием гирь 19 и 2О по шкале коромысла 3 весов уста навливают значение требуемой дозы, а ПОложением гири 7 на рычаге 6 устаиавли--. вают величину досыпки. При подаче тодча в схему управления в шючается питатель 15 на номинальную производительность, и чинается наполнение бункера. При этом исполнительный механизм 11 вы-ключен, и усилие от веса гири 7 рычаг 6 и стойку 9 приложено к платформе весов. Это усилие складывается с весом материала, поступающего в бункер, и коромысло 3 под- нимается несколько раньше, чем вес мате риала в бункере достигнет заданного значения. При поднятии коромысло воздействует на путевой датчик 2, выдающий сигнал в схему управления, которая выключает привод питателя и включает исполнительный
4
механизм 11, Исполнитеяыгый механизм 11 приподнимав рычаг б„ снимая с платформы усилие от веса п-гри 7. Коромысло весов опускается, и питатель включается на пониженную производительность (досьт- ка). Когда вес материала в бункере достиг нет заданного, коромысло 3 вторично поднимается, и схема правления выключает аитатель, подает с1-1гнал на открытие дни щЭ; к материал из бункера высыпается. После закрытия дшпца работа устройства повторяется.
Задатчик валичнтгы досыпки выполнен в Енде рьзчага, ось врящения которого ашсреп пена нелодвижко, а плечо опирается ка платформу весов,- снабжен 1;ер8ДВ;и«ной гирей и соединен с исполнительным ме5:анизмом, Юшслюченным к схеме управления. &1агода ря этому имеется возможность регулиро вагь величину досыпки простым перемеще пнем гирьки 7 вдоль рычага 6. Усилие от гирьки 7, прикладыгзаемое к платформе, величшш стабильная, и пет необходимости устанавливать досыпку с большим запасом, что ускоряет шиш взвешивания.
Ф о р м у л а и 3 о б р а т е н и я
Устройство для порционного взвешивания, содержащее платформенные весы с датчиком . положеиия коромысла, двухскоростной пита 1епь с выгрузной горловиной, грузоприеь}ный бункер, задатчшс величины досыпки и исполнительный механизм, о т л и ч а ювд е е с я тем, что, с пелью повышения надежности работы, задатчшс величи1Ш1 досыпки выполнен в виде взаимодействующего с ,П1Ителыпэ1м механизмом рычага, ось вращения которого соединена с основанием весов, и снабйсентгого стойкой, опирающейся на платфорк-гу весов.
Источники информации, принятые во вни;ь:зние при экспертизе:
1.Авторское свидетельство № 504937, ;ш. Q 01 Q. 13/24, 1973.
2.Авторское свидетельство № 385177, JU3. Q 01 Q 11/04, 1971.
16
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор | 1977 |
|
SU624119A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1976 |
|
SU679812A1 |
| Устройство для автоматического дозирования штучных кондитерских изделий | 1977 |
|
SU690317A1 |
| Устройство для порционного взвешивания | 1973 |
|
SU518638A2 |
| Автоматические весы для сыпучих тел | 1933 |
|
SU42316A1 |
| Способ весового автоматического дозирования сыпучих материалов и устройство для его осуществления | 1988 |
|
SU1527511A1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| Устройство весового автоматического дозирования | 1985 |
|
SU1476320A1 |
| Устройство для автоматического взве-шиВАНия и пОРциОННОгО дОзиРОВАНия | 1979 |
|
SU807068A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1977 |
|
SU662818A1 |