(54) СПОСОБ ВЕСОВОГО ПОРЦИОННОГО ДОЗИРОВАНИЯ
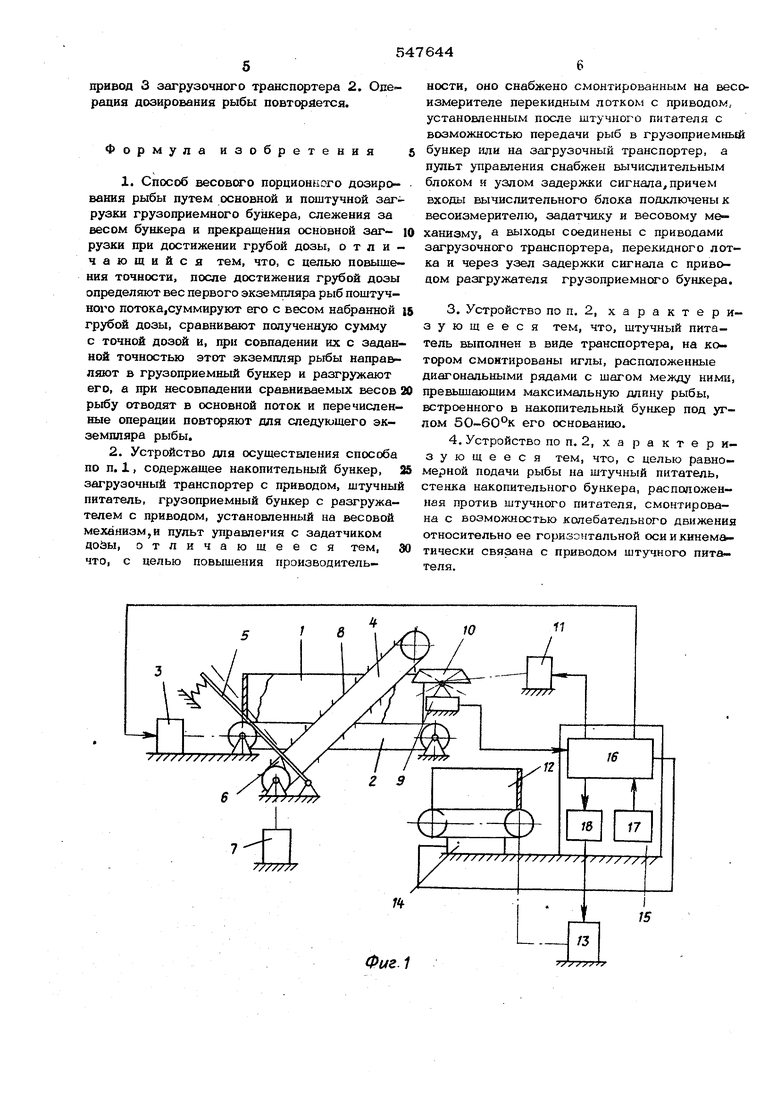
РЫБЫ И УСТРОЙСТВО ДЛЯ ЕГО СХЗУЩЕСТВЛЕНИЯ и перечисленные операции повторяют для следующего экземгшяра рыбы. Устройство для осуществления способа снабжено смонтированным на весоизмерителе перикидным ло1-ком с приводом, установленным после штучного питателя с возможность передачи рыб в грузонриемный бункер или на загрузочный транспортер, а пульт управле ния снабжен вычислительным блоком и узлом задержки сигнала, причем входы вычислителького блока подключены к весоизмерителю, задатчику и весовому механизму, а выходы соединены с приводами загрузочного транспортера, перекидного лотка и через узел задерлски сигнала с приводом разгружателя грузопрлемного бункергд, при этом штучный пита тель выпоглшн в виде транспортера, на котором cMoiiTiipOBaHU иглы, расположенные диаг нальными рядами с uiaiOM между ними, превышающим максимальную длину рыбы.ивстроон в накопительный бункер под углом 50-60 к основанию. Кроме того, стенка накопител ного бункера, распаюженная против штучного питатшш, с1.О1Ггк1-1Оаана с возможностью колебйтю.чьного . оч-иосительно ее горнзонт.шьной оси и кинематически связана с ирИБСщо.м штунао1о нит.нтеля. Iltj фиг. 1 схе маги ч ее к и изображен описываемый дoзaтc)|J; на фиг. 2 - ьитучный питатель дозатора. Дозатор содержит накопительный бункер 1, выпатиенньш в виде нрямоу7 ольной емкости, Д)11)м которой яыии.тси загрузочный тран- 2 с приводом 3 ч штучный питатель 4, aiUjjyt «t;Hiii.iu ниже рабочои транспортерно ленты и.и-.узичиого iijaHCHOpri-.-pa 2 и устаiinwit-iiHi.iri под yrviOM и 50-tJO к 1орнзонту, (-тенк | 5 накопительного бункер 1, установ ленН( напротив штучного питателя 4, смонгирот:;1п шарнирно оаносительно ее горизонTiujbHoft оси и кинематически посредством кулачкл I.; связана с приводом 7 штучного H T:vi4--j i 4. На пггучном HHJcn 1,-ле 4, выпапненио в 1-н5де транспортера, установлены иглы 8, р41спсшоженные диагональными рядами с шагом ними большим, чем возможная моксим.шьная длина досзнруемой рыбы. Восоиамеритель 9 экземгшяра р)ыбы выполнен в виде пружинных весов с предобразователем деформации нружины в электрический сигнал, пропорциональный деформации, а грузовая площадка весоизмерителя является перекидным лотком 10 с приводом 11, Грузоприемный бункер 12 выполнен в виде прямоугольной емкости, дном которой является транспортер с приводом 13. Груэоприемный бункер 12 установлен на весовом механизме 14, который снабжен схемой компенсации ускорений, вызываемых качкой судна, построенной на способе измерения отношения сигналов, соответствующих взвешиваемому грузу и грузу известной величины. На станине дозатора смонтирован пульт управления 15, в котором расположены вычислительный блок 16, задатчик 17 дозы и узел задержки 18 сигналов. На вход вычислительного блока 16 включены весоизмеритель 9 экземпляра рыбы, задатчик 17 дозы и весовой механизм 14, а на выход - привод 11 перекидного лотка 10. привод 3 загрузочного транспортера 2 и через узел задержки 18 сигналов привод 13 транспортера грузоприемного бункера 12. Работает дозатф следующим образом. Из накопительного бункера 1 загрузочным транспортером 2 и штучным питателем 4 рыба попадает в грузоприемный бункер 12, установленный на весовом механизме 14. Кулачок 6 приводит в колебательное движение стенку 5 6y}ucepa 1, которая подвигает рыбу к штучному питателю 4. Рыба накалывается на иглы 8 и поштучно подается на перекндной лоток 10, а с него в грузопр.иемный бункер 12. Сигнал от весового механизма 14, пропорционалынз1й массе рыбы, загруженной в Грузоприемный Зункер 12, непрерывно поступает в вычислительный блок 16. Одновременно в вычислительный блок 16 поступают из задатчика дозы 17 сигналы, пропорциональные грубой и точной дозе. При достижении в бункере 12 грубой дозы вычислительный блок 16 отключает привод 3 зшрузочного транспортера 2 и переводит перекидной лоток 1О в положение На загрузочный транспортер 2. Штучный питатель 4 продолжает подавать экземпляры рыб на перекидной лоток 10, при этом сигнал весоизмеритепя 9 поступает на вход вычислительного блока 16. В случае, если масса экземпляра рыбы не соответствует массе, необходимой для достижения точной дозы, перекидной лоток 10 сохраняет свое положение; если же масса экземпляра рыбы соответствует достижению точной дозы, вычислительный блок 16 выдает сигнал на привод 11 перекидного лотка 10, и он приводится в наложение В Грузоприемный бункер 12, причем вычислительный блок 16 будет держать перекидной лоток 10 в положении В Грузоприемный бункер только на время прохождения этого экземпляра рыбы. Одновременно блок 16 включает через узел задержки 18 привод 13 груэоприемного бункера 12 и точная доза рыбы выгружается. После выгрузки бункера 12 блок 16 снова приводит перекидной лоток 10 в папожение В Грузоприемный бункер и включает привод 3 загрузочного транспортера 2. Осерация дозирования рыбы повторяется. Формула изобретения 1. Способ весового порционного дозирования рыбы путем основной к поштучной загрузки грузоприемного бункера, слежения за весом бункера и прекращения основной загрузки при достижении грубой дозы, отличающийся тем, что, с целью повышения точности, после достижения грубой дозы определшот вес первого экземпляра рыб поштучного потока.суммируют его с весом набранной грубой дозы, сравнивают полученную сумму с точной дозой и, при совпадении их с заданэтот экземпляр рыбы направной точностью ляют в грузоприемный бункер и разгружают его, а при несовпадении сравниваемых весов рыбу отводят в основной поток и перечисленные операции повторяют для следующего экземпляра рыбы. 2. Устройство для осуществления способа по п. 1, содержащее накопительный бункер, загрузочный транспортер с приводом, штучный питатель, грузоприемный бункер с разгружателем с приводом, установленный на весовой механизм,и пульт управления с задатчиком дойы, отличающееся тем, что, с целью повышения производительФиг.1 ности, оно снабжено смонтированным на весоизмерителе перекидным лотком с приводом, установленным после штучного питателя с возможностью передачи рыб в грузоприемный бункер или на загрузочный транспортер, а пульт управления снабжен вычислительным блоком и узлом задержки сигнала причем входы вычислительного блока подключены к весоизмерителю, задатчику и весовому механизму, а выходы соединены с приводами загрузочного транспортера, перекидного лотка и через узел задержки сигнала с приводом разгружателя грузоприемного бункера. 3. Устройство по п, 2, характеризующееся тем, что, штучный питатель выполнен в виде транспортера, на котором смонтированы иглы, расположенные диагональными р$здами с шагом между ними. превьш1аюшим максимальную длину рыбы, встроенного в накопительный бункер под углом 50-60 к его основанию. 4. Устройство по п. 2, х а р а к т е р и- зующееся тем, что, с целью равномерной подачи рыбы на штучный питатель, стенка накопительного бункера, расположенная против штучного питателя, смонтирована с возможностью колебательного движения относительно ее горизонтальной оси и кинематически связана с приводом штучного питателя.
Фиг2

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический весовой дозатор периодического действия | 1975 |
|
SU547643A1 |
| Способ весового порционного дозиро-ВАНия КуСКОВыХ МАТЕРиАлОВ | 1979 |
|
SU807067A1 |
| Устройство управления дозатором | 1983 |
|
SU1200253A1 |
| Способ весового автоматического дозирования сыпучих материалов и устройство для его осуществления | 1988 |
|
SU1527511A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1976 |
|
SU679812A1 |
| Цех для приготовления кормов | 1989 |
|
SU1777778A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1977 |
|
SU662818A1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ ИЗВЕСТКОВО-ОБЖИГОВОЙ ПЕЧИ | 1992 |
|
RU2037785C1 |
| Устройство для автоматического дозирования штучных кондитерских изделий | 1977 |
|
SU690317A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |

