11
Изобретение относится к области приборостроения и может быть исполь- зовано для диагностики подшипников качения.
Цель изобретения - повышение точности диагностики состояния подшипников качения.
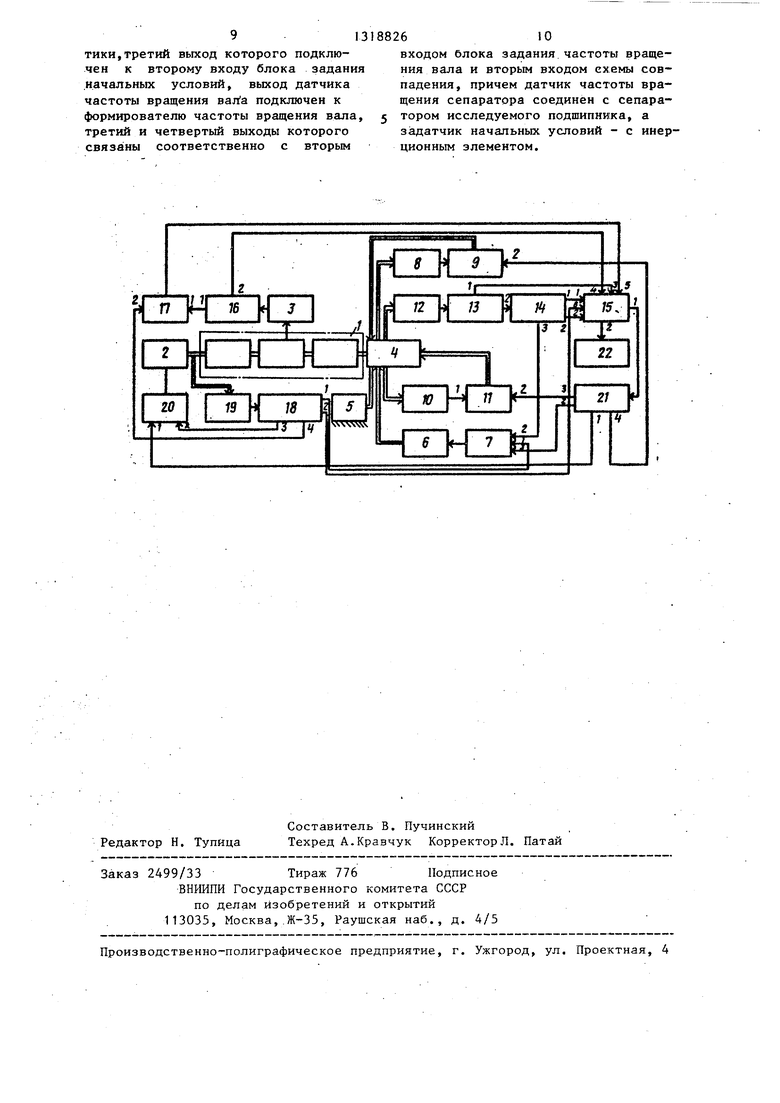
На чертеже дана схема устройства.
Предлагаемое устройство содержит исследуемый подшипник 1, внутреннее кольцо которого закреплено на валу привода 2, а сепаратор связан с датчиком 3 частоты вращения сепаратора. Наружное кольцо подшипника закреплено на инерционном элементе 4, жестко связанном с установленным на основании упругим :3лементом 5. С инерционным элементом 4 связаны также последовательно соединенные задатчик 6 на чальйых условий и блок 7 задания начальных условий.
С инерционным элементом 4 связаны также последовательно соединенные датчик 8 осевой нагрузки и блок 9 зада- ния осевой нагрузки и последовательно соединенные датчик 10 радиальной нагрузки и блок 11 задания радиальной нагрузки.
К инерционному элементу 4 подключен также датчик 12 углового положения, выход которого через усилитель- преобразователь 13 подключен к фор- мирователю 14 переходной характеристики. Первьш и второй выходы формирователя 14 подключены соответственно к первому и второму входу счетно- решающего преобразователя 15, третий вход которого связан с первым выходом усилителя-преобразователя 13, а четвертый и пятый - соответственно с вторым выходом формирователя 16 -частоты вращения сепаратора и выходом схемы 17 совпадения. Вход формирователя 16 подключен к выходу датчика 3 частоты вращения сепаратора, первый вход - к первому входу схемы 17 совпадения, к второму входу которой подключен четвертый выход формирователя 18, первьм выход которого связан с первым входом блока 7 задания начальных условий, а вход - с датчиком 19 частоты вращения вала, связанными с внутренним кольцом подшипника 1, третий выход формирователя 18 подключен к второму входу 6j;io- ка 20 задания частоты вращения вала, первый вход которого подключен к первому выходу блока 21 управления, а выход - к приводу 2. Второй, тре62
тий и четвертый выходы блока 21 управления соединены соответственно с третьим входом блока 7 задания начальных условий, вторым входом блока 11 задания радиальной нагрузки и вторым входом блока 9 задания осевой нагрузки, а вход блока 21 управления подключен к первому выходу счетно-решающего преобразователя 15,
второй выход которого связан с регистрирующим уСТр.ОЙСТБОМ 22.
Устройство работает следующим образом.
Внутреннее кольцо исследуемого
подшипника 1 устанавливается на валу привода 2, а на наружном кольце устанавливается инерционный элемент 4, с которым через газостатические подушки связаны блок 9 задания осевой нагрузки и блок 11 задания радиальной нагрузки. После этого устройство работает последовательно в режиме Подготовка и Измерение. В режиме Подготовка последовательно производится задание скоростного режима, режимов нагружения и задание величины начальных условий следующим образом. В исходном состоянии сигнал на втором входе блоков 9 и
11 отсутствует, в резуль ате чего по сигналу датчиков 8 и 10 осевой и радиальной нагрузок соответственно устанавливается величина осевой и радиальной нагрузок, равная нулю.
Сигналы на выходе остальных блоков отсутствуют. После окончания переходных процессов с выхода счетно- решающего преобразователя 15 через блок 21 управления на второй вход
блока 20 задания частоты вращения вала подается сигнал, появление которого приводит к появлению управляющего сигнала, приводящего к соответствующему изменению частоты
вращения вала привода 2 до тех пор, пока сигнал обратной связи на первом входе блока 20, сформирован- ньй с помощью датчика 19 частоты вращения вала и формирователя, достигнет величины сигнала на втором входе блока 20.
Таким образом, задается режим работы подшипника, соответствующий условиям эксплуатации. После достижения заданной величины частоты вращения с выхода счетно-решающего преобразователя 15 через блок 21 управления на второй вход блока 9 задания осевой нагрузки и второй вход
блока 11 задания радиальной нагрузки подаются сигналы, пропорциональ- ные требуемой величине осевой и радиальной нагрузок, что приводит к автоматической установке этих нагрузок на исследуемый подшипник 1 с помощью датчиков 8 и 10 осевой и радиальной нагрузок и блоков 9 и 11 задания осевой и радиальной нагрузок.
Остальные блоки работают следующим образом. При подаче сигнала на второй вход блока 20 задания частоты вращения элементы исследуемого подшипника приходят в движение.
При этом на выходе датчика 19 частоты вращения вала формируется последовательность импульсов с периодом Т TgS /Z , где - период одного оборота вала; Z - число импульсов датчика 19 частоты вращения вала за один оборот. На выходе датчика 3 частоты вращения сепаратора формируется последовательность импульсов с периодом Tg ,, где
Напряжение на выходе блока 7 задания начальных условий и выходе за- датчика 6 начальных условий равно нулю, поскольку в исходном состоя, НИИ напряжение на третьем входе блока 7 задания начальных условий равно нулю.
С четвертого выхода формирователя 18 импульсный сигнал поступает на
10 второй вход схемы 17 совпадения, на первый вход которой поступает импульс- ньш сигнал с первого выхода формирователя 16 частоты вращения сепаратора.
f5 На выходе схемы 17 совпадения формируется бинарный сигнал, частота переключения которого определяемся моментами совмещения фронтов импульсных сигналов на втором и первом вхо20 дах блока 17, что соответствует моментам сопряжения одних и тех же точек беговых дорожек и комплекта шариков в сепараторе.
Этот сигнал поступает на пятый
сеп
- период одного оборота сепара- 25 вход счетно-решающего преобразователя 15, на четвертый вход которого поступает сигнал с второго выхода формирователя 16, пропорциональный частоте вращения сепаратора.
тора; m - число шариков, а на выходе датчика 12 углойого положения - частотно-модулированный сигнал, моду лирукнцая функция которого дает представление об угловом положении инерционного элемента 4.
Дальнейшее преобразование сигналов осуществляется следующим образом. С помощью формирователя 18 из сигнала .датчика 19 частоты вращения вала формируется последовательность нормированных импульсов, которая поступает на первьш и четвертый выходы формирователя 18,и аналоговый сигнал, пропорциональный частоте вращения вала, который поступает на -тре тнй и второй выходы формирователя 18. Сигнал с третьего выхода формирователя 18 поступает на второй вход блока 20 задания частоты вращения вала, где используется как сигнал обратной связи для установки и стабилизации требуемой частоты враще ния.Сигнал с второго выхода формирователя 18 поступает на шестой вход счетно-решающего преобразователя 15, импульсный сигнал с первого выхода формирователя 18 поступает на первый
вход блока 7 задания начальных уело- ;г третий вход блока 7 задания начальных
ВИЙ, где из этой последовательности формируется последовательность импульсов стабильной амплитуды и длительности.
условий подается напряжение, величина которого определяет параметры формируемого в блоке 7 пробного импуЛь- са, энергия которого определяется авНапряжение на выходе блока 7 задания начальных условий и выходе за- датчика 6 начальных условий равно нулю, поскольку в исходном состояНИИ напряжение на третьем входе блока 7 задания начальных условий равно нулю.
С четвертого выхода формирователя 18 импульсный сигнал поступает на
второй вход схемы 17 совпадения, на первый вход которой поступает импульс- ньш сигнал с первого выхода формирователя 16 частоты вращения сепаратора.
На выходе схемы 17 совпадения формируется бинарный сигнал, частота переключения которого определяемся моментами совмещения фронтов импульсных сигналов на втором и первом входах блока 17, что соответствует моментам сопряжения одних и тех же точек беговых дорожек и комплекта шариков в сепараторе.
Этот сигнал поступает на пятый
ля 15, на четвертый вход которого поступает сигнал с второго выхода формирователя 16, пропорциональный частоте вращения сепаратора.
Частотно-модулированный сигнал с выхода датчика 12 углового положения поступает на вход усилителя-преобразователя 13 и несет информацию о статическом смешении инерционного
элемента, вызванном действием постоянных и медленно меняющихся составляющих моментов трения, знак которых определяется знаком скорости относительного движения элементов
подшипника качения.
Поскольку в исходном положении задатчик 6 начальных условий отключен, сигнал на втором выходе усилителя-преобразователя 13 отсутствует,
так же как и на первом, втором и третьем выходах формирователя 14 переходной характеристики, к входу которого подключен второй выход усилителя-преобразователя 13.
После этого производится задание величины начальных условий, которое рсуществляется следующим образом. С выхода счетно-решающего преобразователя 15 через блок 21 управления на
условий подается напряжение, величина которого определяет параметры формируемого в блоке 7 пробного импуЛь- са, энергия которого определяется ав5 . 1 тематически в результате сравнения уставки на третьем входе блока 7 с сигналом на втором входе блока 7, возникающим в результате восприятия цепочкой датчик 12, усилитель-преобразователь 13, формирователь 14 реакци механической колебательной системы, в которую входит исследуемьй подшипник, на импульсное входное воздействие. При этом на втором выходе усилителя-преобразователя 1 3 возникает сигнал, представляющий собой импульсную переходную характеристику, являющуюся реакцией колебательной системы, в которую входит исследуемый подшипник на импульсное входное воздействие. Этот сигнал поступает на вход формирователя 14 параметров переходной характеристики. На втором выходе формирователя 14 формируется аналоговый сигнал, дающий представление об изменении периода колебаний в зависимости от амплитуды колебаний, режимов работы и расположения элементов под- щипника. УказаннЬю сигналы с первого и второго выходов формирователя 14 поступают соответственно на первый и второй вход счетно-решающего преобразователя 15, ас третьего выхода - на второй вход блока 7.
Таким образом, в режиме Подготовка на входах счетно-решающего преобразователя 15 имеются следующие сигналы: на первом и втором входе сигналы с. первого и второго выходов формирователя 14, на третьем - сигнал с первого выхода усилителя-преобразователя 13, на четвертом - сигнал с второго выхода формирователя 16 частоты вращения сепаратора, на пятом - сигнал с выхода схемы 17 совпадения, а на шестом - сигнал с выхода формирователя 18 частоты вращения вала.
После окончания переходных процессов устройство переключается в режим Измерение. При этом работой счетно-решающего преобразователя 15 управляет сигнал, поступающий на пятый вход счетно-решающего преобразователя 15.
Отработка сигналов и разбиение на классы составляющих диссипативных моментов сопротивления и переменных составляющих консервативных моментов сопротивления, а также вычисление их количественных характеристик производится для начальных условий
4 /о), f,(o) (1)
266
Поскольку всегда присутствуют нели нейные составляющие моментов сопротивления, обусловленные нелинейностью процессов трения в подшипнике, иэмерение параметров импульсной переходной характеристики производится для всего диапазона допустимых угловых колебаний инерционного элемента 4 путем возвращения устройства в режим
Подготовка и задания соответствующих начальных условий
w,(y.
%(0),4 з(0).
4(0) (0)
П
(2)
в требуемом диапазоне режимов работы. Распознавание составляющих диссипативных моментов сопротивления произ- водится в счетно-решающем преобразователе 15 путем определения коэффициентов bi полинома
25
)
ь,§ + ь,,...,(з)
аппроксимирующего силовую характеристику исследуемой системы, где - обобщенная скорость. Определение коэффициента b ведётся в счетно-решаю- 0 щем устройстве 15 следующим образом,
Для начальных условий (1) вычисляются суммы Х- А. + А и разности
к + L-
соседних полуразмахов;
У, А; - А
находятся вспомогательные величины
35
N
з
U1
40 с, С, . 1 1i--1
где N - номер последнего полуразмаха; решается относительно У , и у 45 система уравнений
А - А.
Ny, С,, -f C,V C,V, С,У,
С,УО+ c,v + с,у с
А - А„
о N
(5)
и вычисляется коэффициент разложения, например, трехчленной аппроксимации, достаточно точно описывающ1ш сило- 55 вую характеристику:
b
с. b . b -w (6)
4 :iru) 2 2u: 2 4
Расчет повторяется для начальных условий (2), а полученные результаты обрабатываются с применением метода наименьших квадратов.
.Переменные составляющие консервативных моментов сопротивления t(g) определяются на основании зависимостей угловой частоты свободных колебаний от полуразмаха А
(7)
и)
4(1
da
С
HDdg
)
Одновремен но с вьтислением динамических составляющих моментов трения производится вычисление статических и кинематических соотношений в соответствии с выражениями
.(t) C4U(t),
,. (t) Т„8()/Т„„(0,
W.CT Cr
i(t) U),g(t)u)
r.cjt)
4en(t Tcen(t (
где Ч стС статическое угловое
смещение инерционного элемента 4;
.С - крутильная жесткость упругого элемента 5; постоянные и медленно- меняющиеся составляющиеся моментов трения; скорость и период вра- щения сепаратора; скорость и период вращения вала,
Результаты вычислений по соотношениям (6), (7)и (8) выводятся с вьпсо- да счетно-решающего преобразователя : 15 на регистрирующее устройство 22. Устройство проводит диагностику состояния подшипников качения как при неподвижном, так и при вращающемся внутреннем кольце, что позволяет повысить достоверность распознавания составляющих сил вязкоупругого сопро тивления и учесть влияние технологических погрешностей на динамические характеристики подшипников качения и точность прецизионных устройств с использованием этих подшипников.
, . -Ф о рмула изобретения
Устройство для диагностики подшипников качения, содержащее последовательно соединенные блок задания частоты вращения вала, привод, датчик частоты вращения вала, регистрирую
щее устройство и инерционный элемент, механически связанный с упругим элементом, датчиком углового положения, датчиком осевой нагрузки, датчиком радиальной нагрузки, блоком задания осевой нагрузки и блоком задания радиальной нагрузки, а также усилитель- преобразователь, при зтом упругий элемент жестко закреплен на основании, выход датчика осевой нагрузки соединен с первым входом блока задания осевой нагрузки, выход датчика радиальной нагрузки - с первым входом блока задания радиальной нагрузки, выход датчика углового положе
20
25
30
ния подключен к первому входу усилителя-преобразователя, а пд)ивод механически связан с внутренним кольцом исследуемого подшипника, отличающееся тем, что, с целью повьш1ения точности диагностики состояния подшипников качения путем измерения совокупности статических кинематических и динамических характеристик, оно снабжено последовательно соединенными формирователем частоты вращения вала, блоком задания начальных условий и задатчиком начальных условий, последовательно соединенными датчиком частоты вращения сепаратора, формирователем частоты вращения сепаратора и схемой совпадения, а также последовательно соединенными формирователем переходной характеристики, счетно-решающим преобразователем и блоком управления, причем второй, третий, четвертый, пятый и шестой входы счетно-решающего преобразователя соединены соответственно с вторым выходом формирователя переходной характеристики, с первым выходом усилителя-преобразователя, вторым выходом формирователя частоты вращения сепаратора, выходом схемы совпа45 дения и вторым выходом формирователя, частоты вращения вала, к второму выходу счетно-решающего преобразователя подключено регистрирующее устройство, первый, второй, третий и чет50 вертый выходы блока управления подключены соответственно к первому входу блока задания частоты вращения вала, третьему входу блока задания начальных условий, к второму входу
55 блока задания радиальной нагрузки и второму входу блока задания осевой нагрузки, второй выход усилителя-преобразователя соединен с входом формирователя переходной характерис35
40
тики,третий выход которого подключен к второму входу блока задания начальных условий, выход датчика частоты вращения вал а подключен к формирователю частоты вращения вгша, третий и четвертый выходы которого связаны соответственно с вторым
входом блока задания частоты вращения вала и вторым входом схемы совпадения, причем датчик частоты вращения сепаратора соединен с сепаратором исследуемого подшипника, а задатчик начальных условий - с инерционным элементом.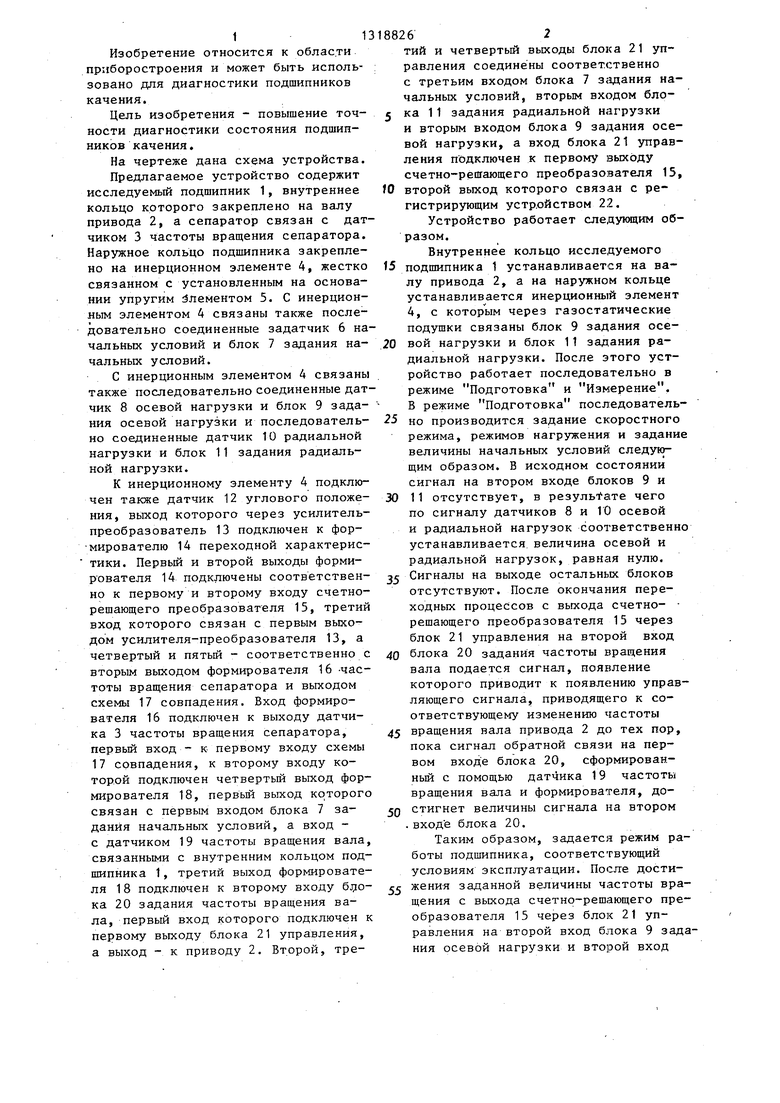
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики роторных опор | 1986 |
|
SU1361465A1 |
| Устройство для диагностики подшипников качения | 1985 |
|
SU1278648A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Устройство для измерения неравномерности скорости вращения валов в опорах качения | 1977 |
|
SU711474A1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Устройство для возбуждения главного генератора тепловоза | 1981 |
|
SU965821A1 |
| Устройство для исследования динамических характеристик материалов с внутренним трением,например,пассиков и магнитных лент | 1984 |
|
SU1150659A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ | 1990 |
|
RU2064777C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
Изобретение относится к области приборостроения. Цель изобретения - повышение точности диагностики состояния подшипников качения. С помощью предпагаемого устройства может быть проведена диагностика технического . состояния подшипников качения путем измерения совокупности статических, кинематических и динамических характеристик. Устройство содержит исследуемый подшипник, внутреннее кольцо кот,орого закреплено на валу привода. а сепаратор связан с датчиком частоты вращения сепаратора. Наружное кольцо подшипника закреплено на инерционном элементе, жестко св язано с установленным на основании упругим элементом. С инерционным элементом связаны также блоки задания осевой и радиальной нагрузок и задат- чик начальных условий, управляемьй блоком задания начальных условий. Колебательное движение инерционного элемента фиксируется датчиком углового положения. Обработка сигналов, поступающих с усилителя-преобразователя, выходов формирователя переходной характеристики, формирователя частоты вращения сепаратора, схемы совпадения и формирователя частоты вращения вала производится в процессоре счетно-решающего преобразователя. Первьй выход счетно-решающего преобразователя связан с блоком управления, а второй подключен к регистрирующему устройству. 1 ил. . (Л
Редактор Н. Тупица
Составитель В. Пучинский
Техред А.Кравчук КорректорЛ. Патай
Заказ 2499/33 Тираж 776 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,.Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для измерения жесткости подшипника качения | 1983 |
|
SU1134896A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
