Известные датчики линейных ускорений обладают недостаточной чувствительностью для успешного использования в системах автоматического управления высокой точности. Дальнейшее повышение их чувствительности ограничено спепифическими особенностями: наличием сухого трения в сопряженных элементах, восприимчивостью к различным помехам и т. д.
Предлагаемый прибор свободен от указанных недостатков.
Он основам на использовании эффекта приложения силы инерции к телу, испытываюш;ему вынужденные колебания с определенной частотой, причем для создания вибраций в конструкцию датчика заложен принцип вибрационного гироскопа. Повышенная, по сравнению с известными приборами, чувствительность и помехозашишенность датчика достигаются новым и оригинальным решением, заключающимся в использовании в качестве ипериионного элемента груза на пружинном подвесе, установленного в колеблющейся рамке на врапдаюн,емся с ностоянноГ) скоростью основании.
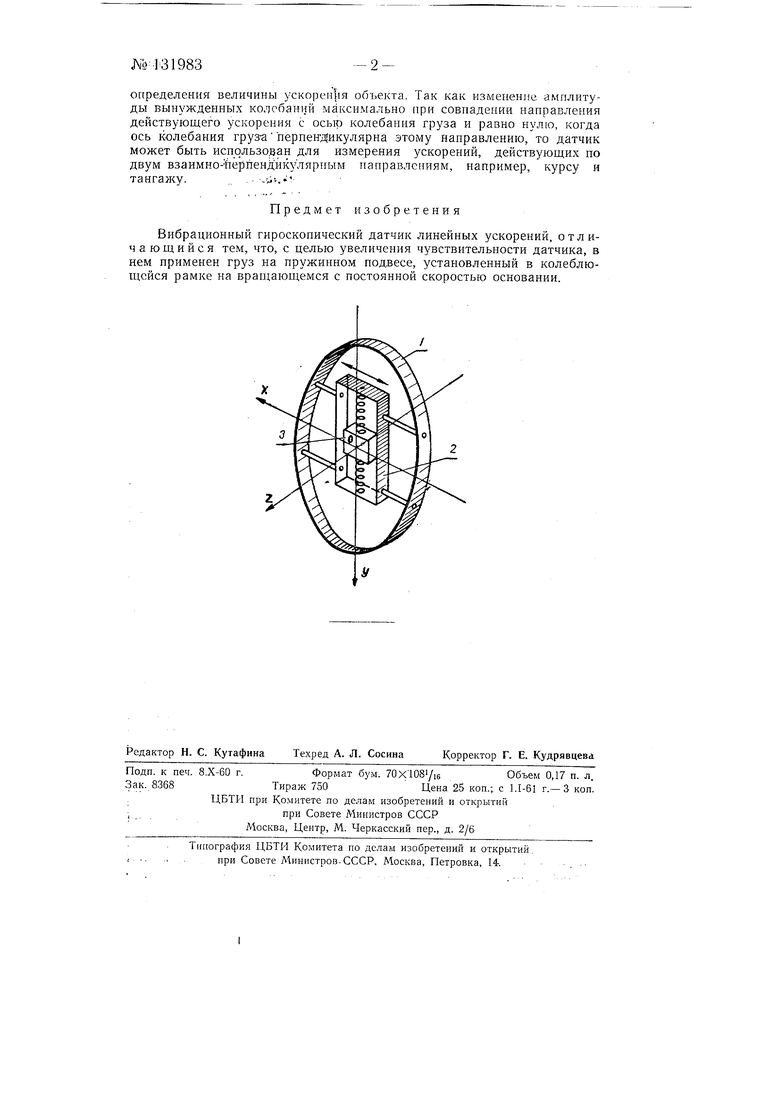
На чертеже изображена принципиальная схема датчика.
Датчик состоит кз основания 1, вращающегося с постоянной угловой скоростью вокруг оси OZ, внутри которого устаиовлеиа рамка 2 с нодвеишнным на пружинах грузом 3. Рамка 2 приводится в непрерывное колебательное движение относительно основания / в направлении, перпендикулярном к оси колебания груза 3.
При одновременном вращении основания / и колебании рамки 2 на груз 3 действует сила Кориолиса, которая, совпадая с направлением колебания груза, вызывает его вынужденные колебания. При наличии ускорения объекта, на котором установлен датчик, например, в направлеиии, перпендикулярном оси вращения OZ, на груз действует сила инерции. Изменение амплитуды вынужденных колебаний груза в этом случае пропорционально действующему ускорению и является мерой
определения величины ускорения объекта. Так как измененле амплитуды вынужденных колобаний максимально нри совнадеиии нанравления действующего ускорения с осью колебания груза и равно нулю, когда ось колебания груз-а перпендикулярна этому наиравлению, то датчик может быть использован для измерения ускорений, действующих по двум взаимно-йёрпендйкулярным направлениям, например, курсу и тангажу... . .
Предмет изобретения
Вибрационный гироскопический датчик линейных ускорений, отличающийся тем, что, с целью увеличения чувствительности датчика, в нем применен груз на пружинном подвесе, установленный в колеблющейся рамке на вращающемся с постоянной скоростью основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| Способ ориентирования | 1989 |
|
SU1675671A1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| ЧАСТОТНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2010 |
|
RU2436106C2 |
| ЧАСТОТНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2019 |
|
RU2709706C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Микромеханический вибрационный гироскоп | 2021 |
|
RU2761764C1 |
