(54) СИСТЕМА СТАБИЛИЗАЦИИ НАТЯЖЕНИЯ ПОДЪЕМНОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Способ управления драглайном и устройство его осуществления | 1989 |
|
SU1707148A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1986 |
|
SU1320350A2 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
I
Изобретение относится к управлению экскаваторами-драглайнами.
Известна система стабилизации натяжения подъемного каната экскаватора драглайна, содержащая командоаппарат, устройство управления приводом подъема, преобразователь для питания двигателя н датчик статической составляющей тока (1).
Одиако это устройство уменьшает динамические нагрузки при выборе слабины подъемного каната, но не устраняет возможности ее образования.
Известна также система стабилизацин натяжения подъемного каната экскаваторадраглайна, содержащая командоаппарат подъема, соединенный с блоком управления приводом подъема, преобразователь, датчик статической составляющей тока двигателя и задатчик натяжения 12.
В указанной системе сигнал, пропорциональный рассогласованию .между заданным и действительным значением натяжения каната, поступает на вход системы управления приводом подъема, обладающей невысоким быстродействием. Кроме того, измерение натяжения в системе производится косвеиным путем по статической составляющей то
ка якорной цепи двигателя, что не обеспечивает необходимую точиость действительных значений иатяжения канатов, а это, в свою очередь, снижает точиость работы всей системы.
Цель изобретения - повышение произS водительиости экскаватора за счет повышения быстродействия и точности работы системы.
Указанная цель достигается тем, что сие)Q тема снабжена датчиком натяжения, двумя, блоками ключей, командоаппаратом тяги, блоками контроля нулевого положения командоаппаратов подъема и тяги, регулятором иатяжения, причем командоаппарат подъема соединен через блок контроля нуt5 левого положения командоаппарата подъема с первым блоком ключей и с блоком управления приводом подъема, который соедииеи через первый блок ключей с преобразователем, датчик статической составляющей тока соединенс первым и вторым блоками ключей, первый выход датчика натяжения соединен со входом датчнка производной натяжения, выход которого соединен с одним из входов регулятора натяжения, второй выход датчика натяжения соединен со вторым входом регулятора натяжения, третий вход которого связан с задатчи koM натяжения, выход регулятора натяжв: НИН через второй блок ключей соединен с преобразователем, а комаггдоаппарат тяги соединен через блок контроля нулевого положения командоаппарата тяги со вторым блоком ключей.
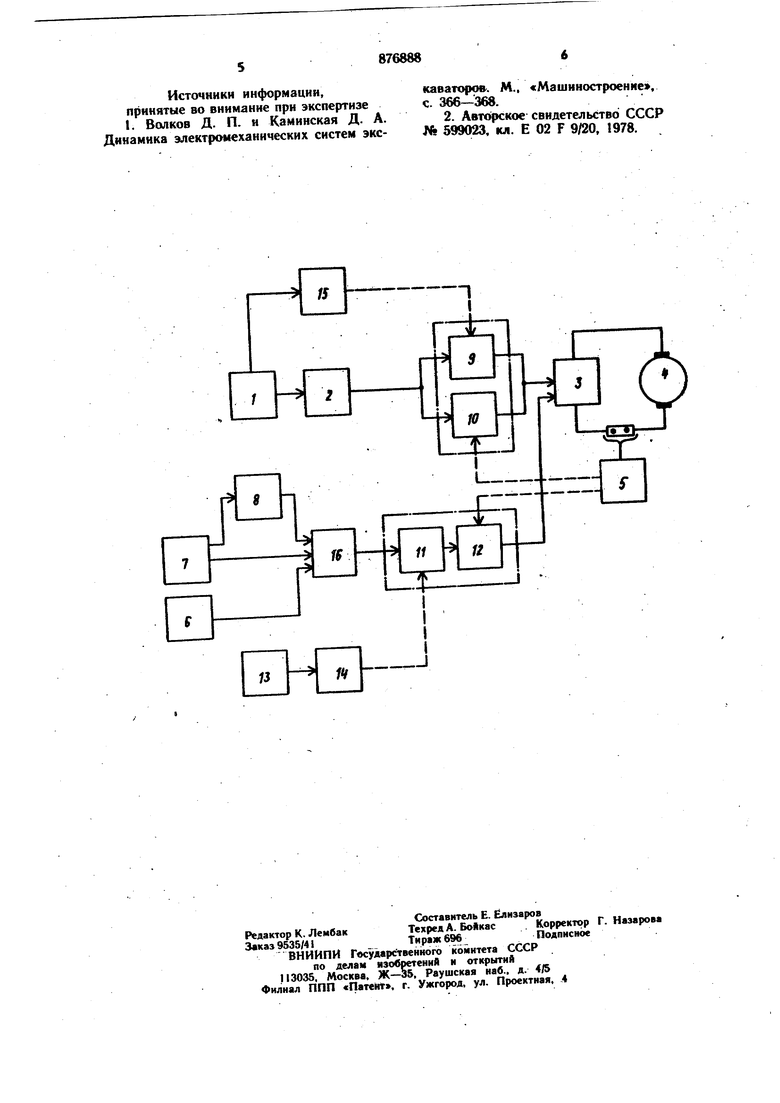
На чертеже представлена блок-схема предлагаемой системы стабилизации натяЖения подъемного каната экскаватора-дра лайка.
Система содержит командоаппарат 1 под Ь .ема, устройство 2 управления приводом подъ ёма, преобразователь 3, двигатель 4, датчик 5 статической составляющей тока, задатчик 6 натяжения, датчик 7 натяжения, датчик 8 производной натяжения, первый блок .ключей, состоящий из логических элементов 9 и 10, включенных по схеме ИЛИ, второйблок ключей, состоящий из логических элементов N и 12, соединенных по схеме И, командоаппарат 13 тяги, блок 14 контроля нулевого положения командоапг парата тяги, блок 5 контроля нулевого положения командоаппарата подъема и регулятор 16 натяжения.
Система, работает следующим образом.
Поддержание заданного натяжения при образовании слабины подъемного каната обеспечивается контуром регулирования натяжения, состоящего из элементов 3, 4, 6, 7, В, П, 12, и 16.
При натяжении канала меньше заданного сигнал от датчика 7 натяжения поступает на регулятор 16 натяжения непосредственно и через датчик 8 производной натяжения, служащий для улучшения качества переходного процесса регулироваиия натяжения, в регуляторе натяжения сигнал сравнивается с заданным значением, устанавливаемым задатчиком 6 натяжения и далее результирующий сигнал идет через второй блок ключей М и 12 иа преобразователь 3, вследствие чего скорость двигателя 4 увеличивается в направлении выбора слабины подъемного каната;
Логические элементы 9 н 10 первого блока ключей н II, 12 второго блока ключей, а также блоки 14 и 15 контроля нулевого положения командоаппарата тяги и подъема предназначены для попеременного включения и отключения контура регулирования натяжения и известной снстемы управления, состоящей из элементов 1, 2, 3, 4, 9 и 10.
. Состояние элементов 9 н 11 зависит от положения командоаппарата подъема и тяги. В случае, если командоаппараты находятся в нулевом .положении, элементы 9 н 11 закрыты, 6 противном случае - открыты.;
Состояние элементов Юн 12 зависит от .величины статического тока якорной цепи
двигателя. Значенне статического тока, равное току при поднятом ковше, является порогом срабатывания логических элементов 10 и 12. В случае, если статический ток в цепи якоря двигателя больше заданного значения, то элемент 10 открыт, а элемент 12 - закрыт. В противном случае элемент 10 закрыт, а элемент, 12 открыт.
В случае, когда командоаппарат 13 тяги сдвинут с нулевого положения, комаидоаппарат I подъема находится в нулевом положеннн,а статический ток меньше тока при поднятом KoBiiie, логические элементы 9 и 10 закрыты, и известная система управления подъемом огключеиа, а логические элементы 11 и 12 открыты и включен контур регулирования натяжения:
Во всех других случаях работает известная (стандартная Система управления, и контур регулнроваиия натяження отключен.
Использование новых элементов в системе стабилизации натяжения подъемного каната позволяет повысить быстродействие и точность работы системы, что снижает динамические нагрузки в элеметромеханической части привода подъема и позволяет повысить производительность экскаватора.
Формула изобретения
Система стабилизации натяжения подъемного каната экскаватора-драглайна, содержащая командоаппарат подъема, соединенный с блоком управления приводом подъема, преобразователь, датчик статической составляющей тока Двигателя и задатчик натяжения, отличающаяся тем, что, с целью повышения производительности экскаватора за счет повышения быстродействия и точности работы системы, оиа снабжена датчиком натяжения, двумя блоками ключей, командоаппаратом тяги, блоками контроля нулевого положеиия комаидоаппаратов подъема и тяги н регулятором иа-сяжения, причем командоаппарат подъема соединен через блок контроля нулевого положения командоаппарата подъема с .первым блоком ключей и с блоком управления приводом подъема, который соедииен через первый блок ключей с преобразователем, датчик статической составляющей тока соединен с первым и вторым блоками ключей, первый выход датчика иатяжеиия соединен со входом датчика производиой натяжения, выход .Которого соединен с одним из входов регулятора натяжеиия, второй выход датчика натяження соединен со вторым входом регулятора иатяжеиия, третий вход которого связан с задатчиком иатяжения, выход регулятора натяжения через второй блок ключей соединен с преобразователем, а командоаппарат тяги соедннен через блок контроля нулевого положения командоаппарата тяги со BTopbiM блоком ключей.
Источники информации, принятые во виимаиие при экспертизе t. Валков Д. П. и Камииская Д. А. Динамика электромеханических систем экскаваторов. М., «Машииостроеине. с. 366-368.
