1
Изобретение относится к горной промышленности и предназначено для автоматического или дистанционного управления секциями крепи угледобывающих агрегатов.
Известна система управления механизированными крепями, включающая насосную установку, гидромагистрали напора, слива, секционные гидрораспределители с торцовыми золотниками и распределительными втулками и дополнительную магистраль управления.
Недостаток такой системы в необходимости остановок подачи базы па забой.
Наиболее близким техническим решением из известных к предлагаемому является система гидравлического управления секцией крепи угледобывающего агрегата, содерлсащая фронтально передвигаемую базу, гидродомкраты, стойки, соединенные гидромагистралями с распределителями, блокировочным элементом и камерами управления.
Эта система не обеспечивает неисправность подачи базы на забой, что сдерживает производительность угледобывающего агрегата.
Цель изобретения - повышение производительности агрегата.
Поставленная цель достигается тем, что блокировочный элемент предлагаемой системы соединен с выходным каналом и камерой управления распределителя, а камера управления блокировочного элемента соединена с порщневой полостью стойки, при этом блокировочный элемент подпружинен до величины предварительного распора секции крепи.
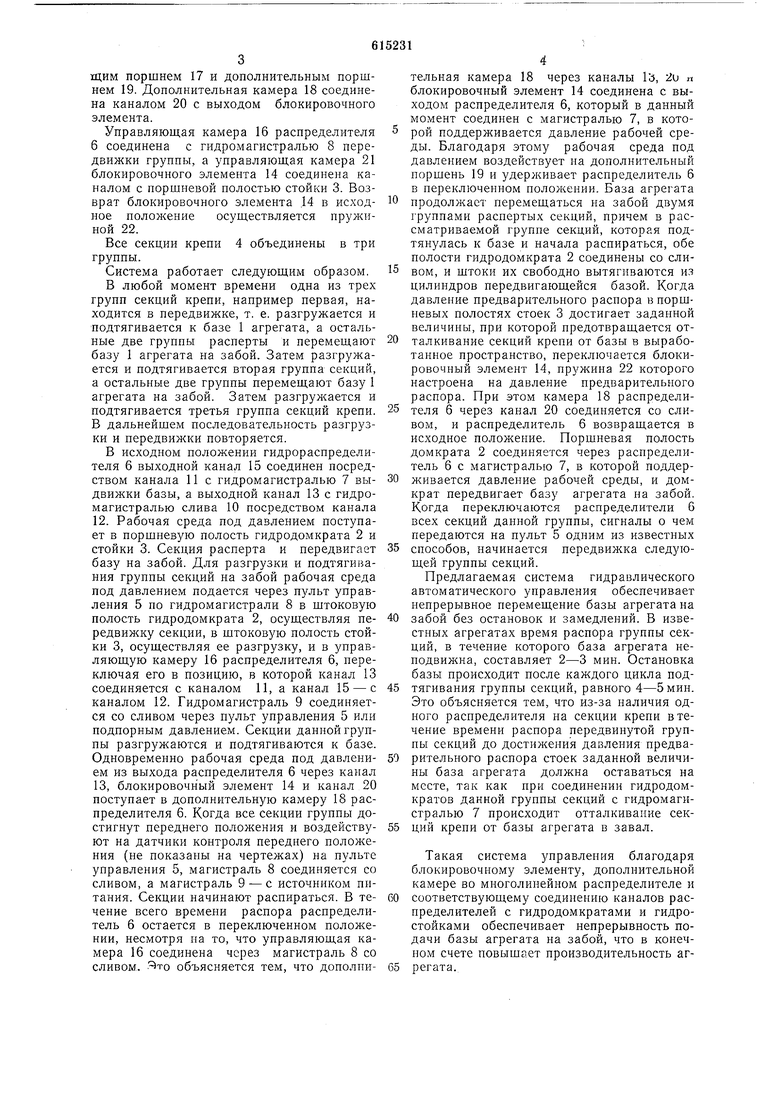
На фиг. 1 представлена принципиальная гидравлическая схема агрегата; на фиг. 2- принципиальная гидравлическая схема системы автоматического управления одной секцией крепи.
Система содержит управляемую базу 1, фронтально передвигаемую гидродомкратами 2, стойки 3, образующие три группы секций крепи 4, пульт управления 5, установленный на штреке и соединенный с многолинейными распределителями 6, гидромагистралями: 7 - выдвижки базы, 8 - передвижки трех групп секций крепи, количество которых равно числу групп секций крепи, 9-распора стоек и 10 - слива через капалы 11 и 12. Один из выходных каналов 13 распределителя 6 соединен с выходным каналом блокировочного элемента 14, а второй выходной канал соединен каналом 15 с гидродомкратом 2.
Распределитель 6 имеет камеру управления 16, образованную корпусом и управляющим поршнем 17 и дополнительную камеру 18, образованную корпусом, управляющим поршнем 17 и дополнительным поршнем 19. Дополнительная камера 18 соединена каналом 20 с выходом блокировочного элемента.
Управляюш ая камера 16 распределителя 6 соединена с гидромагистралью 8 передвижки группы, а управляюшая камера 21 блокировочного элемента 14 соединена каналом с поршневой полостью стойки 3. Возврат блокировочного элемента ,14 в исходное положение осуш;ествляется пружиной 22.
Все секции крепи 4 объединены в три группы.
Система работает следующим образом.
В любой момент времени одна из трех групп секций крепи, например первая, находится Б передвижке, т. е. разгружается и подтягивается к базе 1 агрегата, а остальные две группы расперты и перемещают базу 1 агрегата на забой. Затем разгружается и подтягивается вторая группа секций, а остальные две группы перемещают базу 1 агрегата на забой. Затем разгружается и подтягивается третья группа секций крепи. В дальнейшем последовательность разгрузки и передвижки повторяется.
В исходном положении гидрораспределителя 6 выходной канал 15 соединен посредством канала 11 с гидромагистралью 7 выдвижки базы, а выходной канал 13 с гидромагистралью слива 10 посредством канала
12.Рабочая среда под давлением поступает в поршневую полость гидродомкрата 2 и стойки 3. Секция расперта и передвигает базу на забой. Для разгрузки и подтягивания группы секций на забой рабочая среда под давлением подается через пульт управления 5 по гидромагистрали 8 в штоковую полость гидродомкрата 2, осуществляя передвижку секции, в штоковую полость стойки 3, осуществляя ее разгрузку, и в управляющую камеру 16 распределителя 6, переключая его в позицию, в которой канал 13 соединяется с каналом И, а канал 15 - с каналом 12. Гидромагистраль 9 соединяется со сливом через пульт управления 5 или подпорным давлением. Секции данной группы разгружаются и подтягиваются к базе. Одновременно рабочая среда под давлением из выхода распределителя 6 через канал
13,блокировочный элемент 14 и канал 20 поступает в дополнительную камеру 18 распределителя 6. Когда все секции группы достигнут переднего положения и воздействуют на датчики контроля переднего полож;ения (не показаны на чертежах) на пульте управления 5, магистраль 8 соединяется со сливом, а магистраль 9 - с источником питания. Секции начинают распираться. В течение всего времени распора распределитель 6 остается в переключенном положении, несмотря на то, что управляющая камера 16 соединена через магистраль 8 со сливом. объясняется тем, что дополнительная камера 18 через каналы 1Ь, 2и и блокировочный элемент 14 соединена с выходом распределителя 6, который в данный момент соединен с магистралью 7, в которой поддерживается давление рабочей среды. Благодаря этому рабочая среда под давлением воздействует на дополнительный поршень 19 и удерживает распределитель 6 в переключенном положении. База агрегата
продолжает перемещаться на забой двумя группами распертых секций, причем в рассматриваемой группе секций, которая подтянулась к базе и начала распираться, обе полости гидродомкрата 2 соединены со еливом, и штоки их свободно вытягиваются из цилиндров передвигающейся базой. Когда давление предварительного распора в поршневых полостях стоек 3 достигает заданной величины, при которой предотвращается отталкивание секций крепи от базы в выработанное пространство, переключается блокировочный элемент 14, пружина 22 которого настроена на давление предварительного распора. При этом камера 18 распределителя 6 через канал 20 соединяется со сливом, и распределитель 6 возвращается в исходное положение. Поршневая полость домкрата 2 соединяется через распределитель 6 с магистралью 7, в которой поддерживается давление рабочей среды, и домкрат передвигает базу агрегата на забой. Когда переключаются распределители 6 всех секций данной группы, сигналы о чем передаются на пульт 5 одним из известных
способов, начинается передвижка следующей группы секций.
Предлагаемая система гидравлического автоматического управления обеспечивает ненрерывное перемещение базы агрегата на
забой без остановок и замедлений. В известных агрегатах время распора группы секций, в течение которого база агрегата ненодвижна, составляет 2-3 мин. Остановка базы происходит после каждого цикла подтягивания группы секций, равного 4-5 мин. Это объясняется тем, что из-за наличия одного распределителя на секции крепи в течение времени распора передвинутой группы секций до достижения давления предварительного распора стоек заданной величины база агрегата должна оставаться на месте, так как нри соединении гидродомкратов данной группы секций с гидромагистралью 7 происходит отталкивание секций крепи от базы агрегата в завал.
Такая система управления благодаря блокировочному элементу, дополнительной камере во многолинейном распределителе и
соответствующему соединению каналов распределителей с гидродомкратами и гидростойками обеспечивает непрерывность подачи базы агрегата на забой, что в конечном счете повышает производительность агрегата.
Формула изобретения
Система гидравлического управления секцией креии угледобывающего агрегата, содержащая фронтально передвигаемую базу, гидродомкраты, стойки, соединенные гидромагистралями с распределителями, блокировочным элементом и камерами управления, отличающаяся тем, что, с
целью повыщения производительности агрегата, блокировочный элемент соединен с выходным каналом и камерой управления распределителя, а камера управления блокировочного элемента соединена с порщневой полостью стойки, при этом блокировочный элемент подпружинен до величины предварительного распора секции крепи.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Механизированная крепь | 1982 |
|
SU1153079A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| Система гидравлического дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1528925A1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата | 1988 |
|
SU1703827A1 |
| Система передвижения забойного конвейера струговой лавы | 1973 |
|
SU742603A1 |
| Устройство для шагового перемещения базы механизированной крепи | 1979 |
|
SU861640A1 |
.„82 S.3 А
«J 6.1
JO
Jtl
/
15
/
Фиг. г
