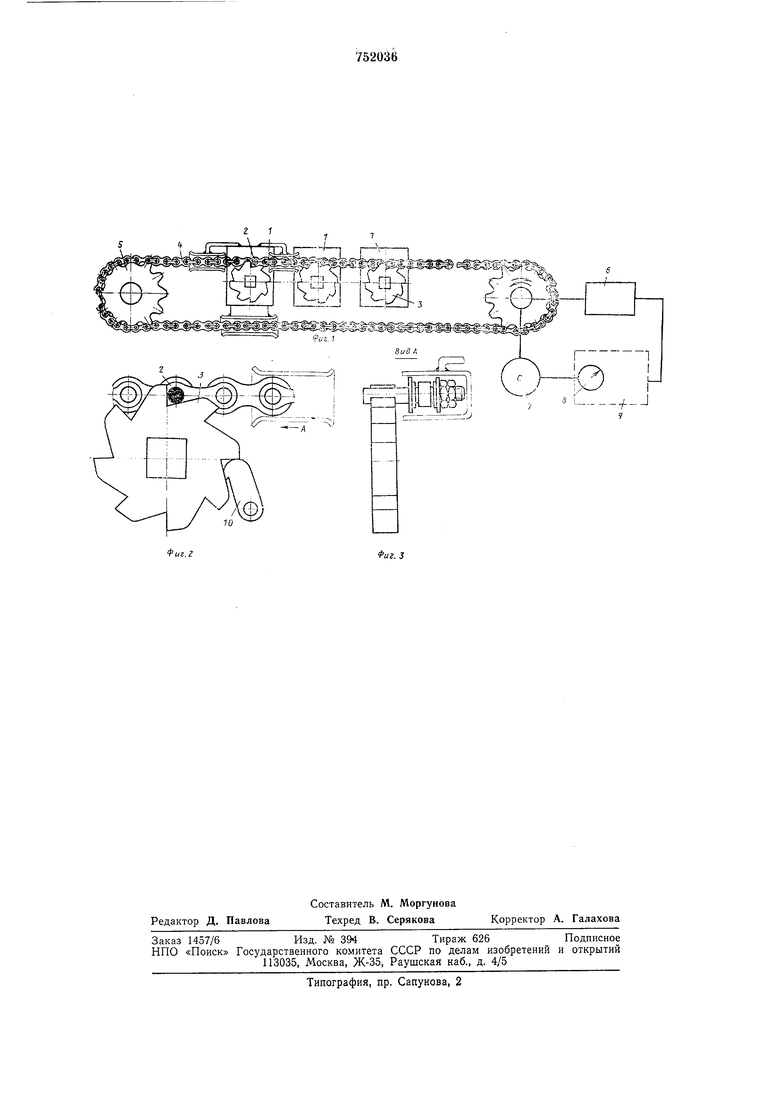
щей звездочки 5 привода 6 йо часовой стрелке захват 2 свободно перемещается (скользит) вправо по зубьям храповых колес 3, пе переключая гидрораспределители 1.
Бращеппе ведущей звездочкп 5 с помощью электрического преобразователя 7, например сельсина, передается на пульт 9, где по указателю 8 положения захвата контролируют его подход к нужному гидрораспределптелю 1. Тогда с пульта 9 реверсируется движение гибкой связи 4, в результате захват 2 входит в зацепление с храиовым колесом выбранного гидрорасиределптеля и поворачивает его на заданный угол (шаг) t, если необходимо повернуть гидрораспределитель на п-ое количество шагов Z,, то движеиие влево продолжается до тех пор пока л-ое количество пальцев не пройдет через храповое колесо 3 выбранного гидрораспределителя. Так как положение захвата 2 дистаициоиио контролируется па пульте по указателю 8, то остальные захваты могут быть разиесены практически па любое необходимое расстояние, но не более расстояния между соседними гидрораспределптелями, поэтому петрудно осуществить дистанционный контроль поворота гидрораспределителя на заданный угол. Для выбора следующего гидрораспределителя с пульта 9 реверсируется движеиие захвата вправо и т. д.
В тех случаях, когда по условиям работы необходимо иметь смещения исполнительных механизмов (гидрораспределителей относительно друг друга, цепь необходимо заменить тонким тросиком с захватом, а зубчатые храповые колеса могут быть заменены фрикциоппымп храповиками. При этом сущность работы устройства сохрапяется (выбор пужного гпдрораспределителя осуществлется прп движении захвата в одну сторону, управление - в другую).
Преимуществами описываемого устройства являются простота системы, невысокие
требо зания к Точности изготовления и монтажа, получаемые за счет принятого припципа избирания (изменение направления движения захвата); относительно высокое
быстродействие, получаемое за счет конструкции захвата и устаиовки его на двух иротивоположиых участках, делящих гибкую связь пополам (сокращается путь подхода захвата к нужному гидрорасиределителю). Кроме того, устройство снаожено приводом, имеющим две скороста: ьысокую для выбора пульного гидрораспределителя и низкую - для переключения шдрораспределителя. Последпее также повышает
падежность работы системы. При этом не требуется высокой точности контроля положения захвата, так как точное переключение гидрораспределителя достигается за счет коиструкции захвата, направляющих
и профиля зубьев храпового колеса и не зависит от точности дистанционною контроля иоложепия захвата.
Формула изобретения
Устройство для дистанционно унравления многопозициопнымп гидрорас)феделителями, преимущественно для механизированных крепей, содержащее гибкую связь с захватами, взаимодействующими с распределителями, привод и пульт управлеиия, отличающееся тем, что, с целью упрощения конструкции и обеспечения избирательного многонозициоиного переключения, гибкая связь выиолнена в виде замкиутого элемента и снабжена автономным приводом, а захваты расположепы по гибкой связи с шагом, соответствующим иозициям
расиределителей.
Источники информации, нрииятые во внимание при экспертизе 1. Авторское свидетельство СССР 244268, кл. Е 21D 23/00, 1967.
2. Патент Франции № 1487718, кл. E21d, опубл. 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГИДРОРАСПРЕДЕЛИТЕЛЯМИ | 1971 |
|
SU303445A1 |
| Устройство дистанционного управления секцией крепи | 1979 |
|
SU870735A1 |
| Устройство для дистанционного управления многопозиционными распределителями механизированных крепей | 1982 |
|
SU1116170A1 |
| Устройство дистанционного управления секциями крепи | 1979 |
|
SU863876A2 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |
| Станок для притирки резьбовых колец | 1944 |
|
SU67410A1 |
| Привод главного вала контроллера машиниста | 1983 |
|
SU1093586A1 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| АДРЕСОВАТЕЛЬ ГРУЗОВ ПОДЪЕМНИКА | 1969 |
|
SU243799A1 |
| Устройство для переключения числа оборотов коробок скоростей металлорежущих станков и других машин | 1950 |
|
SU93542A1 |