Изобретение относится к балансировочной технике и может быть использовано при разработке автоматических балансировочных станков.
Цель изобретения - расширение технологических возможностей путем разделения во времени процессов измерения и корректировки.
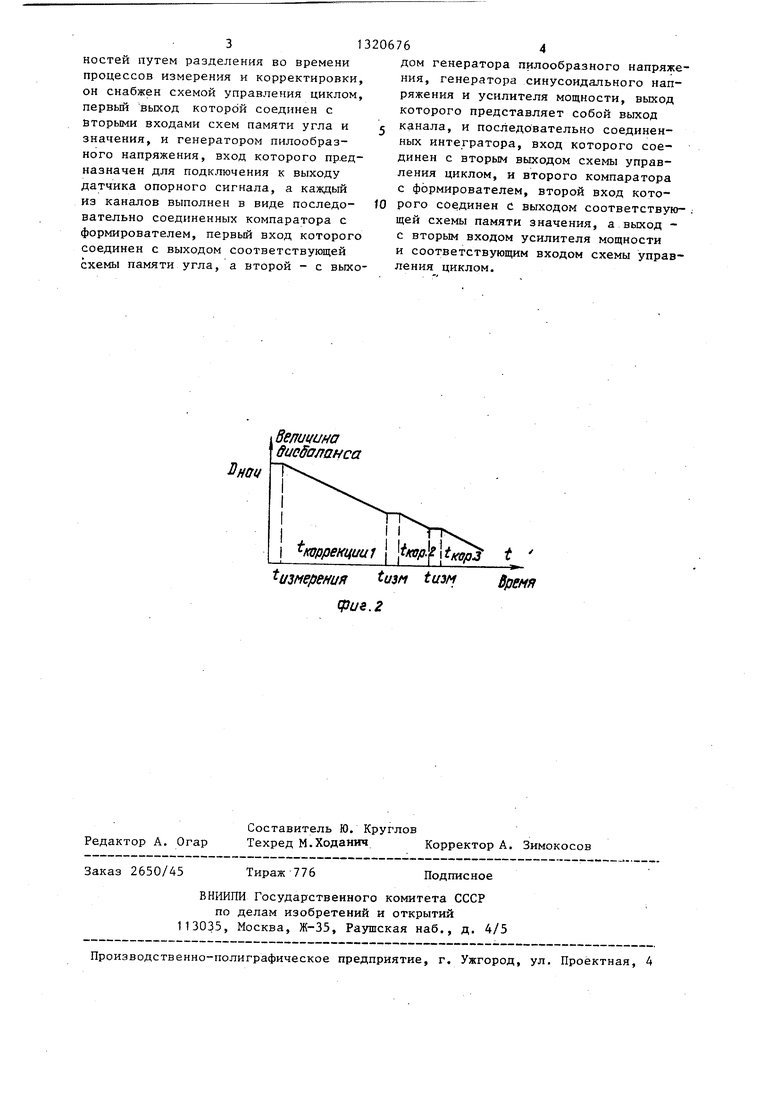
На фиг. 1 представлена схема блока управления; на фиг. 2 - изменение сигнала дисбаланса во времени.
Блок управления содержит генератор 1 пилообразного напряжения, вход которого предназначен для подклю.че- ния к датчику опорного сигнала, два идентичных канала, каждый иг. кот орых выполнен в виде схемы 2(3) памяти . угла и схемы 4-Х5) памяти значения, . выходы которых предназначены для подключения к выходу измерительного блока станка, последовательно соединенных компаратора 6(7) с формирователем, первый вход которого соединен с выходом схемы 2(3) памяти угла, а второй - с выходом генератора 1 пилообразного напряжения, генератора 8(9) синусоидального напряжения и усилителя 10(11) мощности, выход которого предназначен для подключения к корректирующим механизмам и последовательно соединенных интегратора 12(13) и второго (четвертого) компаратора 14(15) с формирователем, второй вход которого соединен с выходом схемы 4(5) памяти значения, и схему 16 управления циклом , входы которой соединены с выходами второго и четвертого компараторов 14 и 15 с формирователями и вторыми входами усилителей 10 и 11 мощности, первый, выход - с вторыми входами схем 2,3 и 4,5 памяти угла и значения, а второй - с входами интеграторов 12 и 13. Блок управления работает следующим образом.
Схема 16 управления циклом задает определенное время на измерение, в течение которого схемы 2(3) и 4(5) памяти угла и значения подключены к выходам измерительного блока. По истечении времени измерения схема 16 управления циклом отключает схемы 2(3) и 4(5) памяти от измерительного устройства (устанавливает их в режим запоминания) и подает постоянное напряжение на входы интегратора 12(13). Напряжение с выхода схемы 2(3) памяти угла, пропорциональное углу дисбаланса, сравнивается на входах первого (третьего) компаратора 6(7) с формирователем с напряжением генератора 1 пилообразного напряжения, и, таким образом, на вход генератора
8(9) синусоидального напряжения поступают импульсы, сдвинутые относительно импульсов датчика опорного сигнала на угол, равньй углу дисбаланса. Импульсы преобразуются в синусоидальное напряжение, усиливаемое усилителем 10(11) мощности, подключенным к корректирующему механизму.
Одновременно линейно нарастающее
напряжение интегратора 12(13) сравниваете на входах второго (четвёртого) компаратора 14(15) с выходным напряжением схемы 4(5) памяти значения, пропорциональным значению дисбаланса. Как только сигнал с интегратора 12(13) превысит сигнал схемы 4(5) памяти значения, компаратор 14(15) выдает сигнал на вход схемы 16 управления циклом и одновременно по
вторс му входу усилителя 10 ( 11) мощности прекращает подачу синусоидального сигнала на вход корректирующего устройства, в результате чего прекращается корректировка в данной
плоскости.
После поступления сигналов от двух каналов о прекращении корректировки схема 16 управления циклом подает команду на повторное измерение.
Режимы Измерение И Корректировка чередуются до получения заданной точности. За счет разделения во времени режимов исключаются помехи от корректировки при измерении и повышается точность балансировки. Таким образом, предлагаемьй блок управления станком для балансировки роторов при вращении позволяет разделить во времени процессы корректировки и
измерения.
Формула изобретения
Блок управления станком для балан- сировки роторов, содержащий два идентичных канала, включающие схемы памяти угла и значения, входы которых
предназначены для подключения к соот.ветствующим выходам измерительного
блока станка, а выходы каналов предназначены для подключения к корректирующим механизмам станка, отличающийся тем, что, с целью расширения технологических возможностеи путем разделения во времени процессов измерения и корректировки он снабжен схемой управления циклом первый выход которой соединен с вторыми входами схем памяти угла и значения, и генератором пилообразного напряжения, вход которого предназначен для подключения к выходу датчика опорного сигнала, а каждый из каналов выполнен в виде последовательно соединенных компаратора с формирователем, первый вход которог соединен с выходом соответствующей
схемы памяти угла, а второй - с вых
206764
дом генератора пилообразного напряжения, генератора синусоидального напряжения и усилителя мощности, выход которого представляет собой выход канала, и последовательно соединенных интегратора, вход которого соединен с вторым выходом схемы управления циклом, и второго компаратора с формирователем, второй вход которого соединен с выходом соответствую10
щей схемы памяти значения, а выход - с вторым входом усилителя мощности и соответствующим входом схемы управ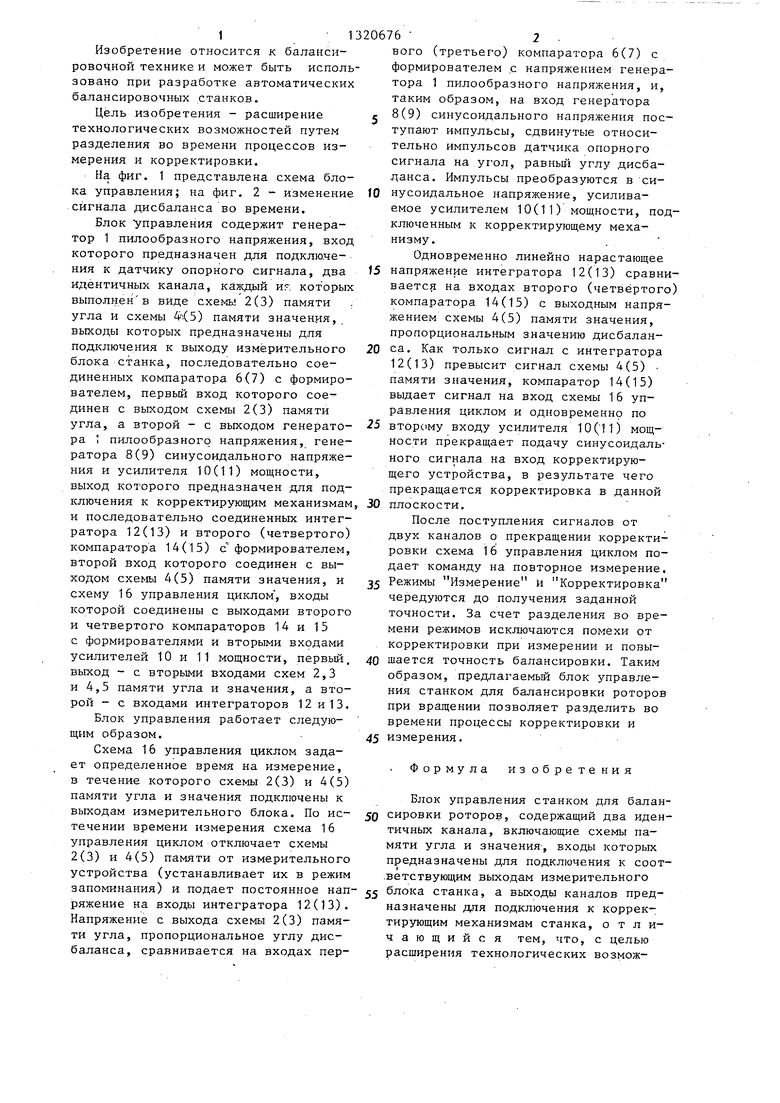
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Балансировочное устройство | 1981 |
|
SU991207A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство для балансировочного станка | 1976 |
|
SU557275A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
Изобретение относится к балансировочной технике. Цель изобретения - расширение технологических возможностей путем разделения во времени процессов измерения и коррекции. По значению угла дисбаланса для каждой из плоскостей коррекции с помощью генератора 8(9) синусоидаль-. ноге напряжения формируется сдвину- тьй по фазе сигнал, усиливающийся в усилителе 10(11) мощности, выход которого предназначен для подключения к корректирующему инструменту. Сигнал .на отключение усилителя 10(11) мощности формируется в компараторе 14(15) с формирователем, режимы Измерение и Корректировка задаются по сигналу с выходов последних схемой 16 управления циклом. 2 ил. а & От5лок Г измерения :|ИНЖ Отдат- ццка Огл5лока измерения ккоррек- тирующим - мааниз-I Mati 1- Од ю о 05 О 97//е.7
HOt
Вели1 ина 8ис5сгланса
коррекции 1 I
измерения изм tu3M (риг. 2
Редактор А. Огар
Составитель Ю. Круглов
Техред М.Ходаяич Корректор А. Зимокосов
Заказ 2650/45
Тираж 776
ВННИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Время
Подписное
| Способ балансировки ротора | 1983 |
|
SU1099216A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Технология электротехнического производства | |||
| Реферативный научно- технический сборник | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
