(54) БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259119A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
Изобретение относится к балансировочной технике и может быть использоВсшо в балансировочных станках - автоматах с разделенными измерительной и корректирующей системами.
Известно балансировочное устройство, содержащее блок измерения с датчиками дисбаланса; связанный с ним блок устранения влияния плоскостей коррекции и блок обработки сигнала, к выходу которого подключен указаf тель дисбаланса tl3.
Недостатком устройства является отсутствие блоков промежуточной памяти, что исключает их применение в балансировочных автоматах с разделенными измерительной и корректирующей системами.
Наиболее близким по технической сущности к изобретению является балансировочное устройствЪ,содержа- щее последовательно соединенные двухканальные блок измерения дисбаланса, в который входят датчики, опорный генератор, усилитель, демодулятор и преобразователь, блок промежуточной памяти, каждый канал которого состоит изсоединенных последовательно аналогового ключа и запоминающего блока, входы блока соединены с выходами блока измерения через блок памяти, и блок управления, предназначенный для формирования системы команд управления блоком измерения и механизмом корректировки, который содержит механизмы отсчета глубины сверления и механизкш ориентации . ротора по углу. По параметрам дисбаланса, хранящимся в блоке промежу10точной памяти, последний управляет работой сверлильных головок.
Устройство позволяет произвести замер параметров дисбаланса ротора по двум плоскостям одновременно, за15помнить эти параметр, передать их в блок промежуточной памяти, количество каналов которого зависит от количества запоминаемых параметров. Цикл работы устройства позволяет
20 производить одновременно замер параметров дисбаланса одного ротора и коррекцию дисбаланса другого по данным замера в предыдущем цикле, результаты которого передаются в про25межуточную память вместе с перемещением ротора с измерительного блока на механизм коррекции C2J.
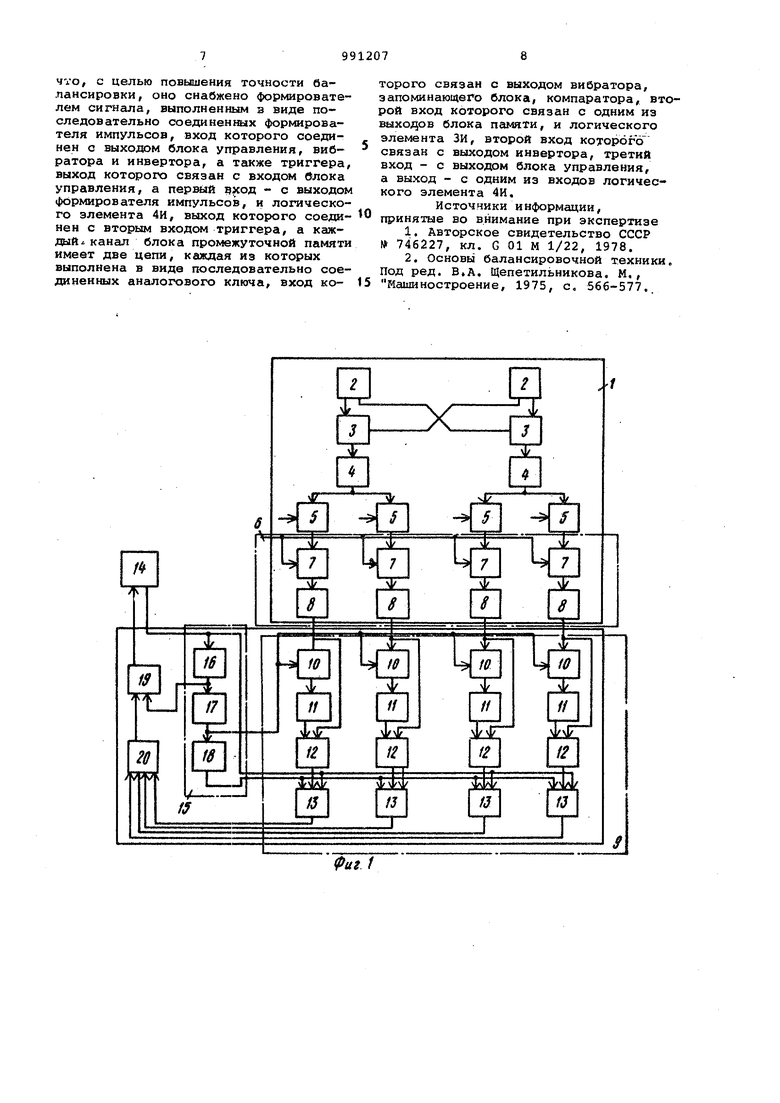
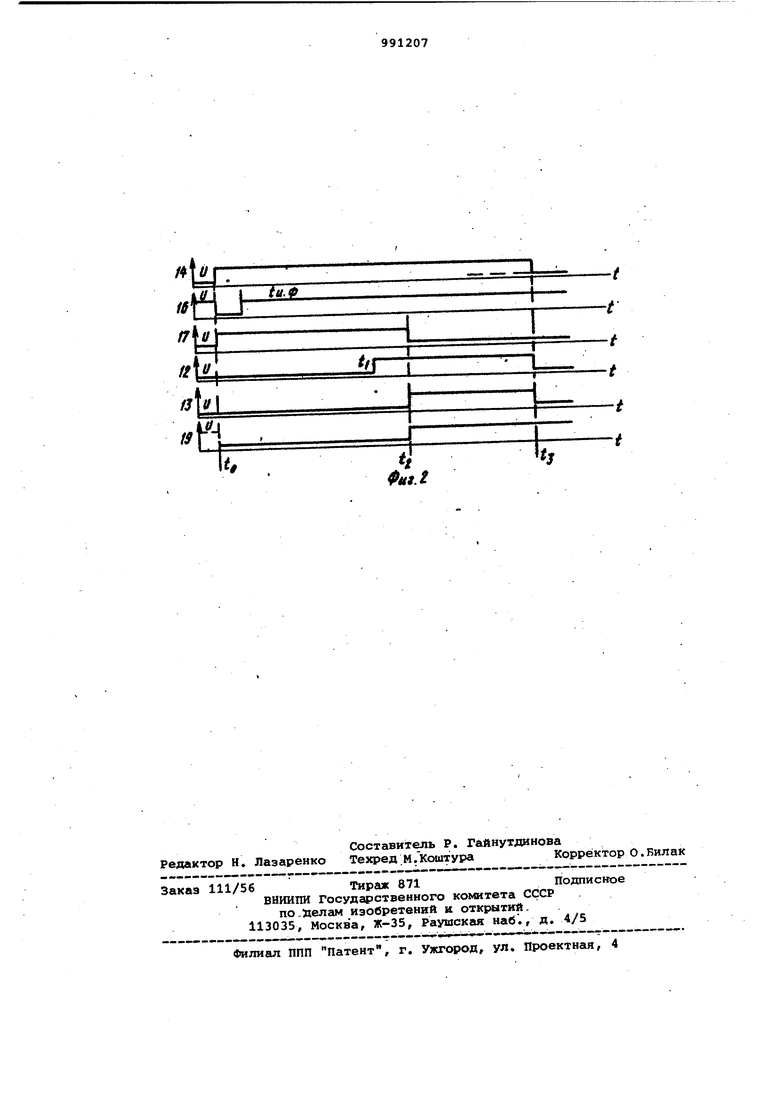
Недостаток устройства заключается в том, что оно не обеспечивает тре30буемой точности балансировки, так как отсутствует контроль за передаче измеренных параметров в блок промежуточной памяти. В случае нарушения контактов в аналоговых ключах или неисправностей запоминающего блока каналов блока промежуточной памяти измеренные параметры будут переданы с искажениями, что приведет к ошибоч ной коррекции дисбаланса ротора, и, как следствие, к снижению точности балансировки ротора. Целью изобретения является повышение точности балансировки. Поставленная цель достигается тем что балансировочное устройство, соде жащее последовательно соединенные двухканальные блок измерения дисбаланса, блок памяти и блок промежуточ ной памяти, а, также блок управления снабжено формирователем сигнала, выполненным в виде последовательно сое диненных формирователя импульсов, вход которого соединен с выходом бло ка управления, вибратора и инвертор а также триггера, выход которого связан с входом блока управления, а первый вход - с выходом формирователя импульсов, и логического элемента 4И, выход которого соединен с вторым входом триггера, а каждый ка нал блока промежуточной памяти имее две цепи, каждая из которых выполне на в виде последовательно соединенны аналогового ключа, вход которого св зан с выходом вибратора, запоминающего блока, компаратора, второй вхо которого связан с одним из ,выходов блока памяти, и логического sjieMeHTa ЗИ, второй вход которого связан с выходом инвертора, третий эход - с выходом блока управления, а выход с одним из входов логического элемента 4И. На фиг. 1 изображена структурная схема балансировочного устройства на фиг. 2 - временная диаграмма работы блока промежуточной памяти. Устройство содержит блок 1 измерения, разделенный на два измерител ных канала, каждый из которых состо ит из соединенных последовательно .датчика 2 дисбаланса, сумматора 3 схемы разделения плоскостей коррекции, усилителя 4 сигнала датчика 2 дисбаланса и двух,, связанных между собой и с выходом усилителя 4 синхро ных. детекторов 5 ,при этом второй выход датчика 2 дисбаланса одного канала связан с вторым входом сумма тора 3 другого канала, блок б памяти, состоящий из двух каналов, кажд из которых содержит две цепи, состоящие из последовательно соединенных аналогового ключа 7, связанного с выходом .соответствующего синхронного детектора 5 блока 1 измерения и запоминающего блока 8,блок 9 промежуточной памяти, состоящий из двух одинаковых каналов, а каждый канал в свою очередь имеет две цепи, каждая из которых выполнена в вида последовательно соединенных аналогового ключа 10, вход которого связан с выходом соответствующего запоминающего блока 8 блока 6 памяти, запоминающего блока 11, компаратора 12, второй вход которого связан с одним из выходов блока б памяти, и логического элемента ЗИ 13. Устройство содержит также блок 14 управления и формирователь 15 сигнала, который выполнен в виде последовательно соединенных формирователя 16 импульсов, вход которого соединен с выходом блока 14 управления, вибратора 17 и инвертора 18, а также триггера 19,, выход которого .связан с вхолом блока 14 управления, а первый вход - с выходом формирователя 16 импульсов, и логического элемента 4и 20, выход которого соединен с вторым входом триггера 19, при этом выход вибратора 17 связан с входом аналогового ключа 10 каждого канала и каждой цепи блока 9 промежуточной памяти, второй вход логического элемента ЗИ 13 каждого канала каждой цепи блока связан с выходом инвертора 18, третий вход - с выходом блока 14 управления, а выход - с одним входом логического элемента 4И 20. Устройство работает следующим образом. Колебания опор станка (не показан) , пропорциональные дисбалансу ротора(не показан), воспринимаются и преое5разовываются в электрический сигнал датчиками 2 дисбаланса, расположенными в блоке 1 измерения. Так как блок 1 измерения содержит два идентичных канала, то рассмотрим работу одного из них, например левого. Сигналы датчика 2 дисбаланса поступают на входы сумматоров 3 схемы разделения плоскостей коррекции, с помощью которых сигналы датчиков 2 приводятся к заданным плоскостям коррекции. Приведенный сигнал с выхода сумматора 3 поступает на вход усилителя 4 сигнала датчика 2 дисбаланса, затем на синхронных детекторов 5, управляемых от генератора (не показан) опорных сигналов, На выходе синхроншлх детекторов 5 получим постоянные напряжения, пропорциональные проекциям вектора дисбаланса на заданные оси коррекции. Эти напря жения через аналоговый ключ 7 поступают на вход запоминающего блока 8, представляющий собой аналоговый запоминающий блок компараторного типа, После окончания измерения командой из блока 14 управления (связи на структурной схеме не указаны) закрывается аналоговый ключ 7 и вся инфор мация о дисбалансе в левой плоскости коррекции хранится в запоминающих блоках 8. В высокопроизводительных балансировочных автоматах измерительная и корректирующая позиции обычно разделены, и в обработке на автомате находятся сразу два ротора: у одного дисбаланс измеряется, а у второго - корректируется. При этом информация о дисбалансе ротора привязывается к положению ротора на автомате: если ротор находится на измерительной позиции, то информация 0его дисбалансе находится в запоминающих блоках S блока б памяти (посл окончания цикла измерения) . При пере мещении ротора с измерительной позиции на корректирующую информация о его дисбалансе должна также передвинуться в запоминаю1щий блок 11 блока 9 промежуточной памяти и хранится там до окончания коррекции дисбаланса этого ротора. Эта информация используется для отсчета перемещений корректирующих головок (не показашя) и ориентации ротора по углу при коррекции. Задача передачи информации решается следующим образом. При поступлении команды.из блока 14 управления на разре иение передачи информации в блок 9 промежуточной 1памяти на вход формирователя 16 импульсов приходит сигнал, и на его вы ходе формируется отрицательный импульс, длительность которого должна ,быть больше времени установления триггера 19 в нулевое состояние,Формирователь 16 импульса может быть реализован на двух интегральных микросхемах К 511ЛА1 и цепочке RC, задающей длительность импульса. Импуль с выхода формирователя 16 поступает на R-вход триггера 19 R-типа и устанавливает его в нулевое состояние. Одновременно этотимпульс поступает на вход вибратора 17, который формирует импульс передачи информации, длительность которого выбирается по постоянной времени запоминающего блока 11. Схема вибратора 17 может i быть реализована с помощью трех элементов 2Й-НЕ, в качестве которых при менены интегральные микросхег«1 К 511ЛА1. Вибратор 17 запускается по переднему фронту отрицательного импульса, и длительность формируемо- го им импульса определяется только внутренней RC-цепочкой. Так как блок 9 промежуточной памяти содержит иден тичные цепи, количество которых зависит от количества зсшоминаег«лх параметров дисбаланса ротора, рассмотрим работу одной из цепей. Выход ной импульс вибратора 17 открывает аналоговый ключ 10 и тем самым разре шает передачу информации из блока 1. измерения в запомингиощий блок 11. Время передачи определяется длительностью выходного импульса вибратора .17. В момент времени t, когда значения напряжений на входе аналогового ключа 10 и на выходе запоминающего . блока 11 сравнивгоотся или их разность не превысит значений уровней компаратора 12, на выходе последнего сформируется ВЫСОКИЙ уровень напряжения. Комп.аратор 12 представляет собой два однопороговых ко паратора, разнополярные входы которых соединены между собой. срабатывания компаратора 12 от нуля (за нуль принимается разность двух сравниваемых и одинаков лх по величине напряжений на входе компаратора 12) в обе стороны настраивается одинаковым и выбирается по величине разрешенной ошибки в передаче информации. Сигнал с выхода компаратора 12 поступает на вход логического элемента ЗИ 13. Так. как зтороЛ вход элемента ЗИ 13 соединен с выходом блока 14 управления, а третий через инвертор 18 с выходом вибратора .17, то в момент времени tj иа выходе элемента 13 сформируется сигнал, соответствующий состоянию шахода компаратора 12.Этот сигнал поступит -на один из входов логического элемента 4И 20. наличии на всех входах элемента 20 одно- временно высоких уровней, на его выходе формируется ВЫСОКИЙ уровень, который поступит на S-вход триггера 19 и установит его в единичное состояние. С выхода триггера 19 в блок 14 управления поступит команда об окончании передачи информации из блока 1 измерения в блок 9 прсшежуточной памяти. Вели хотя бы в одной из цепей за время tg не произойдет полной передачи информации, команда об окончании передачи информации в блбк 14 управления не поступит и разргааения на коррекцию дисбсшанса этого ротора не будет получено. Таким образом, устройство обеспечивает автоматический контроль за передачей измеренных параметров в блок промежуточной памяти, а наличие в каждой из цепей блока промежуточной памяти элементов, контролирующих полученную информацию, позволяет осуществлять диагностику неисправностей секций, что повышает точность балансировки. Фо1 х1ула изобретения Балансировочное устройство, содержащее последовательно соединенные двухканальные блоки измерения дисбгшанса, блок памяти и блок промежуточной памяти, а также блок управления, отличающееся тем.
4VO, с целью повышения точности балансировки, оно снабжено формирователем сигнала, выполненным в виде последовательно соединенных формирователя импульсов, вход которого соединен с выходом блока управления, вибратора и инвертора, а также триггера, выход которого связан с входом блока управления, а первый Э5сод - с выходом формирователя импульсов, и логического элемента 4И, выход которого соедийен с вторым входом триггера, а каждый канал блока промежуточной памяти имеет две цепи, каждая из которых выполнена в виде последовательно соединенных аналогового ключа, вход которого связан с выходом вибратора, запоминающего блока, компаратора, втрой вход которого связан с одним из выходов блока памяти, и логического элемента ЗИ, второй вход которого связан с выходом инвертора, третий вход - с выходом блока управления, а выход - с одним из входов логического элемента 4И.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 746227, кл. G 01 М 1/22, 1978.
