личину базы градиентометра. Кроме того, предлагаемое устройство имеет пространственную структуру расположения магнитометрических преобразователей, что уменьшает зависимость точности измерений от взаимного распо1
Изобретение относится к средствам магнитных измерений, а именно к средствам регистрации тонкой структуры магнитного поля в ближней зоне источника, и может быть использовано для измерения первых пространственных производных компонент вектора напряженности магнитного поля,являющихся важным информативным параметром поля с точки зрения возможности дистанционной диагностики параметров источника магнитного поля о
Цель изобретения - повышение точ- рости измерений пространственных производных напряженности поля
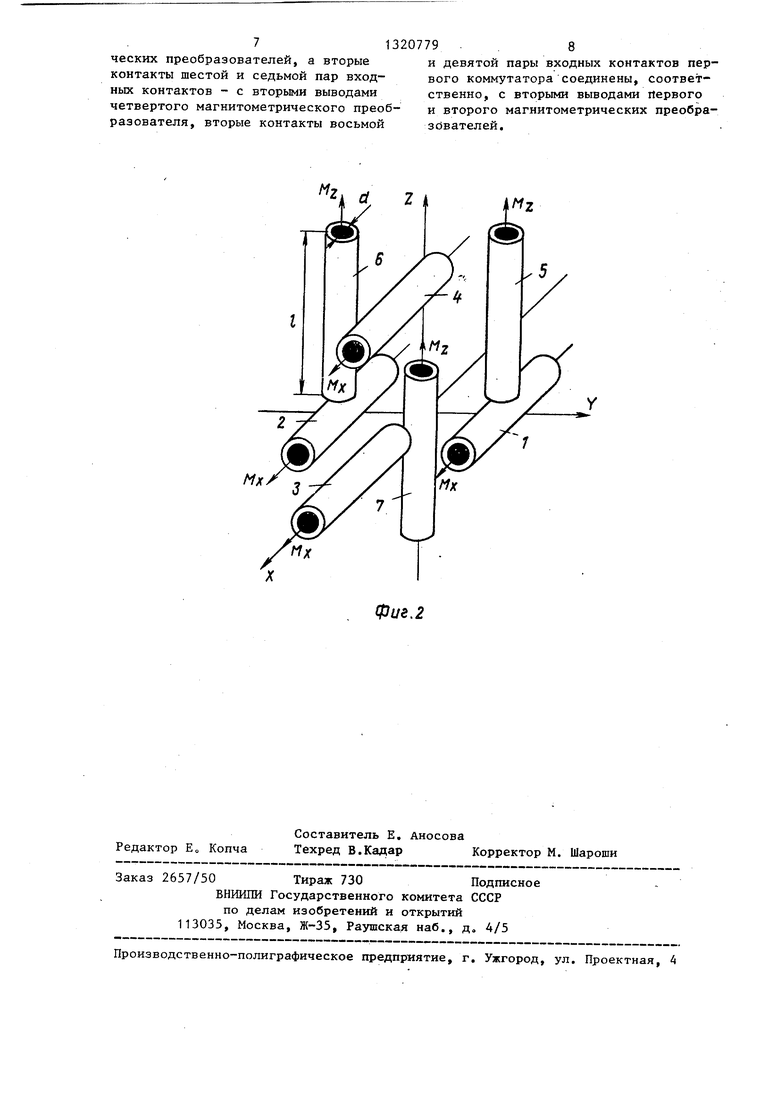
На фиг. 1 изображена схема расположения магнитометрич(гских преобразователей в пространственной прямоугольной системе координат; на функциональная электрическая схема предлагаемого устройства.
Устройство для измерения пространственных производных поля содержит систему магнитометрических преобразователей, размещенных на немагнитном основании так, что центры симметрии первого 1 и второго 2 магнитометрических преобразователей лежат на первой горизонтальной оси пространственной прямоугольной системы координат, центр симметрии третьего магнитооптического преобразователя 3 лежит на второй горизонтальной оси указанной системы координат на o инaкoвoм расстоянии от цейтров симметрии первого 1 и второго 2 магнитометрических преобразователей, а магнитные оси первого 1, второго 2, третьего 3 и четвертого 4 магнитометрических преобразователей параллельны второй горизонтальной оси системы координат, центры симме11)ии пятого 5 и шестого 6 магнитометрических преобразователей лежат на горизонтальной прямой, паложения источника поля и измерительного устройства. Схема расположения магнитометрических преобразователей 1-7 в пространственной прямоугольной системе координат приводится в описании изобретения 2 ил.
раллельной первой горизонтальной оси пространственной прямоугольной системы координат, а магнитные ося пятого 5, шестого 6 и седьмого 7 магнитометрических преобразователей направлены вертикально, причем первые выводы первого 1 и второго 2, третьего 3 и четвертого 4, пятого 5 и шестого 6 магнитометрических преобразователей
соединены, первый коммутатор 8, первый и второй контакты первой, второй и третьей пары входных контактов которого соединены соответственно с вторыми выводами первого 1 и второго
2, третьего 3 и четвертого 4, пятого 5 и шестого 6 магнитометрических преобразователей, а первый контакт четвертой пары соединен с вторым выводом седьмого магнитометрического преобразователя 7, и соединенные последовательно с первым коммутатором усилитель 9, второй коммутатор 10 и регистрирующий прибор 11, каждый из входов которого подключен к соответствующему выходному контакту второго коммутатора 10. Центр симметрии третьего магнитометрического преобразователя 3 расположен в вершине равностороннего треугольника, основанием которого является отрезок, соединяющий центры симметрии первого 1 и второго 2 магнитометрических преобразователей, центр симметрии четвертого магнитометрического преобразователя расположен в вершине тетраэдра, основанием которого является указанный равносторонний треугольник, центры симметрии пятого 5 и шестого 6 магнитометрических преобразователей расположены на
вертикальных прямых, проходяш 1Х через центры симметрии соответственно первого 1 и второго 2 магнитометрических преобразователей над ними, центр симметрии седьмого магнитометрического
образователен, измеряемая в В -м/А:
„ .т
Н, Н. - величины компонент
вектора напряженности поля в месте установки К-го магнитометрического преобразователя.
Первый коммутатор 8 последовательно подает на вход усилителя 9 напряжения и , которые затем поступают на вход второго коммутатора 10, работающего синхронно с первым
Таким образом, предлагаемое уст31320779
преобразователя 7 расположен на вертикальной оси пространственной прямоугольной системы координат в вершине равностороннего треугольника, основанием которого является горизонталь- ный отрезок, соединяющий центры пятого 5 и шестого 6 магнитометрических преобразователей.Первые вьшодытретьего 3 и четвертого 4 магнитометрических преобразователей подключенык первым fo вьшодам первого 1 и второго 2 магнитометрических преобразователей,первьш вьшод седьмого 7 магнитометрического преобразователя соединен с первыми выводами пятого 5 и шестого 6 магни- j ройство позволяет измерить девять не- тометрических преобразователей, вто- личин,U, пропорциональных производ- рой контакт четвертой пары входных ным компонент поля Н, измеренным в контактов первого коммутатора 8 под- различных пространственных направле- ключен к второму выводу пятого 5 маг- ниях. Существующие алгоритмы опреде- нитометрического преобразователя, а 20 ления параметров источника поля ис- первый и второй контакты пятой, шее- пользуют в качестве исходной информа- той, седьмой, восьмой и девятой пары ции значения пяти независимых компо- входных контактов первого коммутато- нент тензора Q, а именно Qx j-Qxii pa 8 подключены соответственно к вто- Q , р„ц и Qij, Все перечисленные рым выводам седьмог;о 7 и шестого 6, 5 компоненты могут быть получены из первого 1 и четвертого 4, второго 2 измеренных величин U с помощью сле- и четвертого 4, третьего 3 и первого 1, третьего 3 и второго 2 магнитометрических преобразователей.
Устройство работает следующим об- JQ разом.
Напряжение на выходе магнитометрических преобразователей 1-4 пропорционально компоненте Н, а напря-i жение на выходе преобразователей 5 - 7 пропорционально компоненте Н напряженности измеряемого магнитного поля. Магнитометрические преобразователи объединены в девять пар и включены встречно. В результате на девять пар входных контактов, первого коммутатора 8 поступают напряжения, пропорциональные разности выходных напряжений магнитометрических преобразователей соответствующей пары
и, о(н; - Н,);
дукнцих элементарных операций: 1
QXX -Г ( Us);
Qxj и, ;
Q,, (и.+и.+и);
(2)
(.r). Де Q.(u, -f- и,)
Ui об(Н - Н); и, ot(H - Е);
и сб( Ир;
Uy об(Н - Н|);
и, с(н; - Hj);
,(1)
ij(j ххх х г- ri, 2
35 H i 2
Перечисленные операции являются составной частью алгоритма решения
,обратной задачи на ЭВМ.
В устройстве величина базы b для всех градиентометров постоянна и на ее минимальную величину не накладывается таких жестких ограничений как в прототипе. Математические операции, необходимые в соответствии с (2) для определения пяти независимых компонент тензора .Q по девяти измеренным значениям, увеличивают величины ошибок определения некоторых из этих компонент и делают их равными: для Qx«-GXX 47, для 1, для 43, для Q,jy-Gyij 2, для Qij7-6yx 1.
Н,); Hi);
Hj),
напряжение на К-м
входе первого комму татора 8;
чувствительность магнитометрических пре-
образователен, измеряемая в В -м/А:
„ .т
Н, Н. - величины компонент
вектора напряженности поля в месте установки К-го магнитометрического преобразователя.
Первый коммутатор 8 последовательно подает на вход усилителя 9 напряжения и , которые затем поступают на вход второго коммутатора 10, работающего синхронно с первым
Таким образом, предлагаемое устройство позволяет измерить девять не- личин,U, пропорциональных производ- ным компонент поля Н, измеренным в различных пространственных направле- ниях. Существующие алгоритмы опреде- ения параметров источника поля ис- пользуют в качестве исходной информа- ции значения пяти независимых компо- нент тензора Q, а именно Qx j-Qxii Q , р„ц и Qij, Все перечисленные омпоненты могут быть получены из змеренных величин U с помощью сле-
ройство позволяет измерить девять не личин,U, пропорциональных производ- ным компонент поля Н, измеренным в различных пространственных направле- ниях. Существующие алгоритмы опреде- ления параметров источника поля ис- пользуют в качестве исходной информа ции значения пяти независимых компо- нент тензора Q, а именно Qx j-Qxii Q , р„ц и Qij, Все перечисленные компоненты могут быть получены из измеренных величин U с помощью сле
дукнцих элементарных операций: 1
QXX -Г ( Us);
Qxj и, ;
Q,, (и.+и.+и);
(2)
i(.r). Де Q.(u, -f- и,);
ij(j ххх х г- ri, 2
35 H i 2
Перечисленные операции являются составной частью алгоритма решения
,обратной задачи на ЭВМ.
В устройстве величина базы b для всех градиентометров постоянна и на ее минимальную величину не накладывается таких жестких ограничений как в прототипе. Математические операции, необходимые в соответствии с (2) для определения пяти независимых компонент тензора .Q по девяти измеренным значениям, увеличивают величины ошибок определения некоторых из этих компонент и делают их равными: для Qx«-GXX 47, для 1, для 43, для Q,jy-Gyij 2, для Qij7-6yx 1.
Среднеквадратичная ошибка измерения компонент тензора Q определяет- 55 ся по формуле
Ч
i. L.i LLi ii-lfaa.
(3)
Величина базы для всех градиентометров предлагаемого устройства постоянна „ Это дает возможность реализовать оптимальную величину базы градиентометра, которая всегда имеет место в реальных условиях при заданных значениях чувствительности гради- е.нтометров и дальности до источника. fcpoMe того, новое устройство имеет
пространственную структуру расположе- fO центр симметрии третьего магнитомет- ния магнитометрических преобразовате- рического преобразователя расположен лей, ЧТО уменьшает зависимость точности измерений от взаимного распов вершине равностороннего треугольниложения источника поля и измерительного устройства
Формула изобретения
ка, основанием которого является отрезок, соединяющий центры симметрии )5 первого и.второго магнитометрических преобразователей, центр симметрии четвертого магнитометрического пре - рбразователя расположен в вершине тетУстройство для измерения простран- раэдра, основанием которого является ственных производных поля, содержащее 20 указанный равносторонний треугольник,, первый коммутатор, выход которого со- центры симметрии пятого и шестого едииен через усилитель с входом вто- магнитометрических преобразователей
рого коммутатора, выход которого соединен с входом регистрирующего прибора, и систему магнитометрических преобразователей, размещенных на немагнитном основании, причем центры симметрии первого и второго магнитометрических преобразователей размещены на первой горизонтальной оси пространственной прямоугольной системы координат, магнитные оси первого, второго, третьего и четвертого магнитометрических преобразователей
параллельны второй горизонтальной оси и шестого магнитометрических преобрапространственной прямоугольной системы координат, а магнитные оси пятого и шестого магнитометрических преобразователей расположены на горизонтальной прямой, параллельной первой горизонтальной оси пространственной прямоугольной системы координат, а магнитные оси пятого, шестого, и седьмого магнитометрических преобразователей расположены параллельно вертикальной оси пространственной прямоугольной системы координат, причем первые выводы первого, третьего и пятого магнитометрических
зователей, причем первые выводы третьего и четвертого магнитометрических преобразователей соединены с первыми выводами третьего и четвертого
Q магнитометрических преобразователей, первый вывод седьмого магнитометрического преобразователя соединен с первыми выводами пятого и шестого магнитометрических преобразователей,
5 второй вывод - с первыми контактами четвертой и пятой пар входных контактов первого коммутатора,первые контакты шестой и седьмой пары входных контактов первого коммутатора соедипреобразователей соединены соответст- Q нены соответственно с вторыми выводами первого и второго магнитометрических преобразователей., первые контакты восьмой и девятой пар входных контактов соединены с вторыми выводами тревенно с первыми выводами второго, четвертого и шестого магнитометрических преобразователей, вторые выводы первого, второго, пятого и шестого, третьего и четвертого магнито- ее тьего магнитометрического преобразо-
метрических преобразователей соединены, соответственно, с первым и вторым контактами первой пары входных контактов, первым и вторым контактавателя, вторые контакты третьей и четвертой пар входных контактов соединены соответственно с вторыми выводами пятого и шестого магнитометрими второй пары входных контактов и первым и вторым контактами третьей пары входных контактов первого коммутатора, первый контакт четвертой пары входных контактов которого соединен с первым выводом седьмого магнитометрического преобразователя, отличающееся тем, что, с целью повьшения точности измерений.
центр симметрии третьего магнитомет- рического преобразователя расположен
в вершине равностороннего треугольнирасположены на вертикальных прямых, проходящих через центры симметрии со25 ответственно первого и второго магнитометрических преобразователей, над ними, центр симметрии седьмого магнитометрического преобразователя расположен на вертикальной оси простран30 ственной прямоугольной системы координат в вершине равностороннего треугольника, основанием которого служит горизонтальный отрезок прямой, соединяющей центры симметрии пятого
зователей, причем первые выводы третьего и четвертого магнитометрических преобразователей соединены с первыми выводами третьего и четвертого
Q магнитометрических преобразователей, первый вывод седьмого магнитометрического преобразователя соединен с первыми выводами пятого и шестого магнитометрических преобразователей,
5 второй вывод - с первыми контактами четвертой и пятой пар входных контактов первого коммутатора,первые контакты шестой и седьмой пары входных контактов первого коммутатора соедивателя, вторые контакты третьей и четвертой пар входных контактов соединены соответственно с вторыми выводами пятого и шестого магнитометрических преобразователей, а вторые контакты шестой и седьмой пар входных контактов - с вторыми выводами четвертого магнитометрического преобразователя, вторые контакты восьмой
и девятой пары входных контактов первого коммутатора соединены, соответственно, с вторыми выводами Первого и второго магнитометрических преобра- зЬвателей,
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| Способ определения напряженности магнитного поля дипольного источника | 1984 |
|
SU1267306A1 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |
| МАГНИТОМЕТР-ГРАДИЕНТОМЕТР НА ОСНОВЕ СКВИДОВ ПОСТОЯННОГО ТОКА ИЗ ВЫСОКОТЕМПЕРАТУРНЫХ СВЕРХПРОВОДНИКОВ | 2008 |
|
RU2384856C1 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2009 |
|
RU2517954C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1983 |
|
SU1840173A1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
Изобретение относится к средствам регистрации тонкой структуры магнитного поля в ближней зоне источника и может быть использовано для измерения первых производных пространственных производных компонент вектора напряженности магнитного поля. Цель изобретения - повьшение точности выполняемых измерений. Устройство содержит систему магнитометрических преобразователей 1-7, два коммутатора 8 и 10, усилитель 9 и регистрирующий прибор 11. К существенным преимуществам предложенного устройства для измерения пространственных производных поля является то, что величина базы для всех градиентометров нового устройства постоянна Это дает возможность реализовать оптимальную веi (Л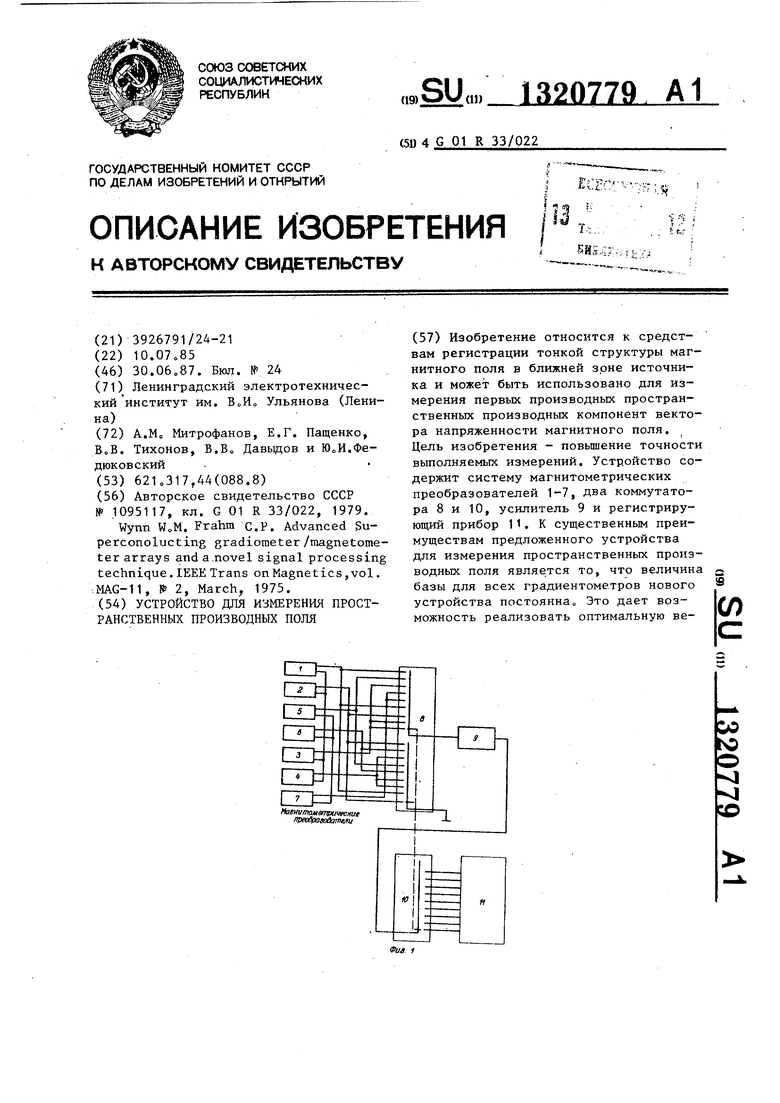
Редактор Е„ Копча
Составитель Е. Аносова
Техред В.Кадар Корректор М. Шароши
Заказ 2657/50 Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиё.2
| Градиентометр | 1979 |
|
SU1095117A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Wynn WoM | |||
| Frahm С.P | |||
| Advanced Su- perconolucting gradiometer/magnetometer arrays and a.novel signal processing technique | |||
| IEEE Trans onKagnetics,vol | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
