Изобретение относится к автоматике, в частности к автоматизированному электромеханическому приводу,и может быть использовано для управления механизмами с изменяющимся приведенным моментом инерции, например, манипуляционными роботами и многокоординатными станками.
Целью изобретения является расширение области применения путем повышения точности оценки переменного момента инерции нагрузки привода.
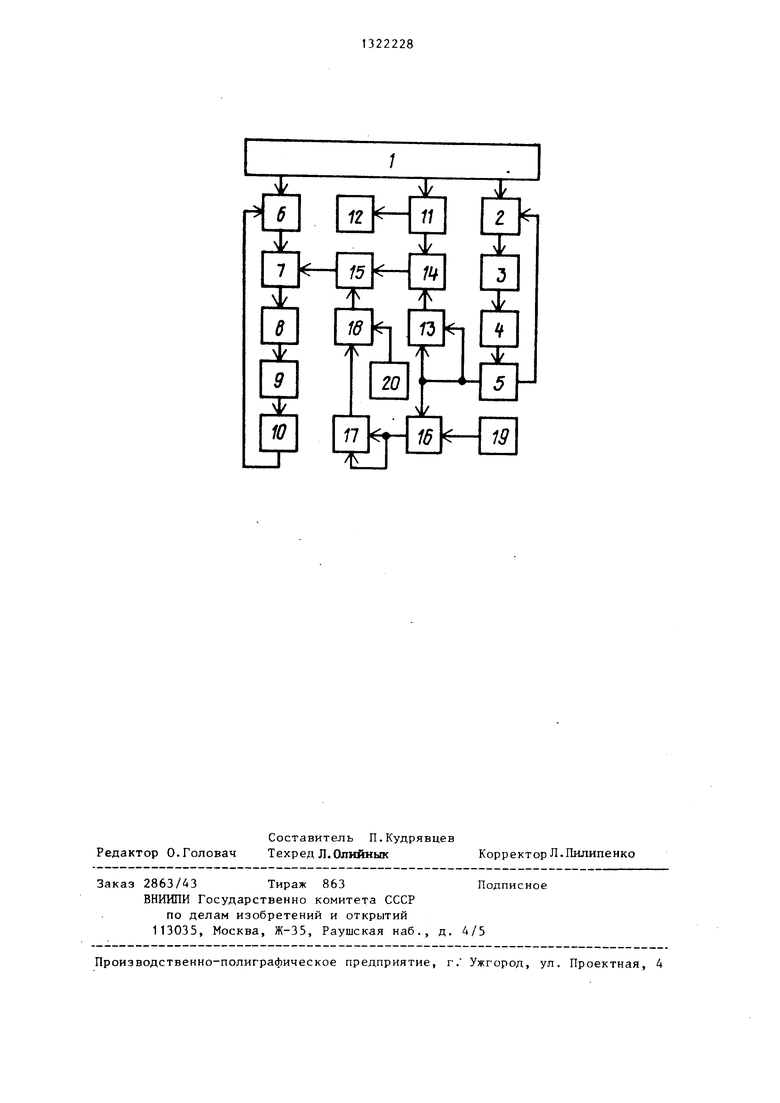
На чертеже представлена блок-схема следящей системы.
Система содержит блок 1 задания программы, первый блок 2 разности, первьй усилитель 3, двигатель 4 радиального перемещения, датчик 5 перемещения, второй блок 6 разности, блок
рый формируется вновь введенными бло ками следующим образом.
Сигнал, пропорциональный текущему значению радиуса г движения схвата,
J с информационного выхода датчика 5 перемещения поступает на объединенные входы первого блока 13 умножения Сигнал с выхода блока 13 пропорциональный квадрату радиуса г, постуfO пает на второй вход второго блока 14 умножения, на первый вход которого с выхода блока 11 управления схва том поступает сигнал, пропорциональный массе переносимого груза т. Сиг15 нал на выходе второго блока 14 умно- жения пропорционален моменту инерции тг груза, переносимого в схвате
Сигнал с информационного выхода датчика 5 перемещения поступает так7 деления, второй усилитель 8, двига-20 же на первый вход третьего блока 16
тель 9 вращения, датчик 10 вращения, блок 11 управления схватом, привод 12 схвата, первый 13 и второй 14 блоки умножения, сумматор 15, третий блок 16 разности, третий блок 17 ум- 25 ножения, усилитель 18 с регулируемым коэффициентом передачи, первый 19 и второй 20 источники постоянного сигнала.
с - Го
19 посторазности, на второй вход которого поступает сигнал, пропорциональный конструктивной константе с выхода первого источника янного сигнала.
Сигнал на выходе третьего блока 16 разности пропорционален Го , т.е. радиусу, на котором перемещается центр масс подвижных частей руки.
Блок 1 задания программы представ-30 Блок 17 осуществляет возведение в
ляет собой устройство, формирующее сигналы управления приводами отдельных координат в соответствии с имеющейся в данном блоке программой.
Следящая система с переменным моментом инерции работает следующим образом.
Блок 1 задания программы выдает сигналы управления приводами 4 и 9, радиального перемещения и вращения 9 на входы первого 2 и второго 6 блоков разности соответственно. Совместная работа двух приводов 4 и 9 обес40 моменту инерции подвижных частей руки без груза в схвате, поступает на первый вход сумматора 15, на второй вход которого поступает сигн mr. Выходной сигнал блока 1Ь, пропечивает движение схвата по пространственной траектории задаваемой прог- 45 порциональный действительному раммой.суммарному значению момента инерции
В процессе отработки заданного перемещения сигналы от блока 1 задания программы и датчика 10 вращения пос- TynajoT на соответствующие входы второго блока 6 разности, где вырабатывается сиг нал и, пропорциональный текущему рассогласованию сигналов заданного и реального положения по оси вращения. С выхода второго блока 6 разности сигнал U поступает на пер- вый вход блока 7 деления. На второй вход его поступает сигнал Ц , который формируется вновь введенными блоками следующим образом.
Сигнал, пропорциональный текущему значению радиуса г движения схвата,
с информационного выхода датчика 5 перемещения поступает на объединенные входы первого блока 13 умножения. Сигнал с выхода блока 13 пропорциональный квадрату радиуса г, поступает на второй вход второго блока 14 умножения, на первый вход которого с выхода блока 11 управления схва- том поступает сигнал, пропорциональный массе переносимого груза т. Сигнал на выходе второго блока 14 умно- жения пропорционален моменту инерции тг груза, переносимого в схвате.
Сигнал с информационного выхода датчика 5 перемещения поступает также на первый вход третьего блока 16
с - Го
19 посторазности, на второй вход которого поступает сигнал, пропорциональный конструктивной константе с выхода первого источника янного сигнала.
Сигнал на выходе третьего блока 16 разности пропорционален Го , т.е. радиусу, на котором перемещается центр масс подвижных частей руки.
квадрат сигнала г, а блок 18 усиливает этот сигнал с коэффициентом пропорциональным массе т подэижных частей руки. Коэффициент усиления
35 блока 18 определяется величиной сигнала, поступающего на его управля- , ющий вход с выхода второго источника 20 постоянного сигнала.Сигнал с выхода блока 18, пропорциальный i
40 моменту инерции подвижных частей руки без груза в схвате, поступает на первый вход сумматора 15, на второй вход которого поступает сигн mr. Выходной сигнал блока 1Ь, про45 порциональный действительному суммарному значению момента инерции
Iv нагрузки привода вращения,поступает на второй вход блока 7 деления, включенного в контур управления дви- гателем вращения.
Управляющий сигнал U уменьшается блоком 7 деления пропорционально получаемой оценке I(t).
Следящая система работает так, что процесс торможения двигателя 9 вращения начинается при определенном, предварительно установленном, значении сигнала на выходе блока 7
деления. Это пороговое значение дос- тиг зется тем дальше от точки позиционирования, чем больше величина сигнала на втором .входе блока 7, т.е. чем больше переменный момент инер- ции I-. и пропорциональный ему динамический момент, препятствующий торможению. Таким образом,в каждый цикл разгона торможения - позиционирования следящей системы торможение двигателя 9 вращения автоматически начинается в момент времени,обеспечивающий полное гашение скорости в точке позиционирования.
Автоматический выбор момента нача- 5 литель с регулируемым коэффициентом
ла торможения позволяет осуществлять перемещение исполнительного механизма на максимальной скорости, т.е. минизировать общее время движения между точками позиционирования на заданной траектории.
Повьщ1ение точности определения оценки I.- обеспечивает соответствие длительности торможения реальной величине переменного момента инерции нагрузки для широкого класса кинематических схем.
Формула из.обретения
Следящая система с переменным моментом инерции, содержащая блок задания программы, последовательно соединенные первый блок разности, первый усилитель, двигатель радиаль- ного перемещения и датчик перемещения, управляющий выход которого подключен к первому входу первого блока разности, последовательно соединенные второй усилитель, двигатель вращения, подключенный выходом к первому входу второго блока разности, второй вход которого соединен с вторым выходом блока задания программы.
третий вькод которого через блок управления охватом соединен с приводом ехвата, второй вход первого блока разности соединен с первым выходом блока задания программы, отличающаяся тем, что, с целью расширения области применения путем повышения точности определения момента инерции нагрузки двигателя вращения, она содержит первый и второй блоки умножения, сумматор, блок деления, первый и второй источники постоянного сигнала, третий блок разности, третий блок умножения и уси0
5
0
0
передачи, управляющий вход которого подключен к выходу второго источника постоянного сигнала, выход усилителя с регулируемым коэффициентом передачи подключен к первому входу сумматора, первые входы первого и третьего блоков умножения соединены с их вторыми входами, первый вход второго блока умножения подключен к второму выходу блока управления схватом, входы первого блока умножения и первый вход третьего блока разности подключены к информационному выходу датчика перемещения,первый вход блока деления соединен с вько- дом второго блока разности, а выход - с входом второго усилителя, выход первого блока умножения соединен с вторым входом второго блока умножения, подключенного выходом к второму входу сумматора, выход которого соединен с вторым входом блока деления, первый источник постоянного сигнала соединен с вторым входом третьего блока разности, подключенного выходом к второму входу третьего блока умножения, выход которого соединен с входом усилителя с регулируемым коэффициентом передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |
| Устройство для моделирования лентопротяжного механизма | 1982 |
|
SU1070574A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Устройство для управления манипулятором | 1986 |
|
SU1333568A1 |
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Устройство для управления приводом робота | 1983 |
|
SU1352450A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
ИзоРретение предназначено для использования в автоматическом электроприводе промышленного оборудования, например манипуляционных робо- тов. Цель изобретения состоит в расширении области применения путем по- вьш1ения точности определения момента инерции нагрузки двигателя вращения. Следящая система состоит из совместно работаю1цих приводов радиального и вращательного движения и общего блока задания программы.В нее введены последовательно соединенные первый и второй блоки умножения, сумматор и блок деления, включенный в контур управления приводом вращения, последовательно соединенные первый источник постоянного сигнала, блок разности, третий блок умножения и усилитель с регулируемым коэффициентом передачи, управляющий вход которого соединен с выходом второго источника постоянного сигнала,а выход - с вторым входом сумматора. Вторые входы первого и третьего блоков умножения объединены с их первыми входами соответственно. Второй вход второго блока умножения подключен к выходу источника сигнала о массе сменного элемента. Входы первого блока умножения и второй вход блока разности подключены к второму выходу датчика обратной связи привода радиального движения. 1 ил. i (Л оо ьо ю ND N9 00
Редактор О.Головач
Составитель П.Кудрявцев Техред Л.Олийнык
Заказ 2863/43 Тираж 863Подписное
ВНИИПИ Государственно комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Пилипенко
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Промышленная робототехника./Под ред | |||
| Я.А.Шифрина | |||
| - М.: Машиностроение, 1982, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
