Изобретение относится к робототехнике и может быть использовано п создании манипуляторов промьшшенных роботов.
Целью изобретения является повышение точности устройства за счет . учета центробежных и кориолисовых сил, возникающих пр.и движении маниплятора по заданной траектории,
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 задания программы, первый сумматор 2, первый усилитель 3, второй-сумматор 4, первый привод 5, первый датчик 6
положения, второй датчик 7 скорости, второй усилитель 8, третий сумматор 9, первый вычислительньш блок 10, первый и второй блоки 11 и 12 умножения соответственно, четвертый сумматор 13, второй привод 14, второй датчик 15 положения, второй датчик. 16 скорости, второй и третий вычислительные блоки 17 и 18, датчик 19 усилия,
Устройство работает следующим образом.
В устройстве реализуется следующи .алгоритм:
+ F
К,41,н(т,3) - (m,S)(q)-cf)-h
ког
С,и,
K,K5 (m)S - K,K5(m)(S-S )-Р ..,
q) S
m
угловая скорость вращения;: вылет руки манипулятора; масса вращающегося звена
.с закрепленным в нем грузом; 40 равления с выхода третьего сумF,. К; момент инерции звеньев манипулятора относительно вертикальной оси вращения (Г,„ I + mS).; кориолисовая сила инерции (F.op 2mSS(p) ; центробежная сила (FIJ mS-cp2); коэффициенты:
матора 9 поступает на привод 5 радиального перемещения и устраняет воз- никшее рассогласование.
Сигнал рассогласования (Cj) - Cf ) с
45 выхода второго сумматора 4 поступает на первый блок 11 у1«1ожения, на него же поступает сигнал, пропорциональный I + mS2, с блока 10(вычислителя моментов инерции), который посту50 пает также на вход второго блока 12 умножения. Сигналы, пропорциональные К, l,,(m,S)(4) -Cf) и К,(|.1и„ (m,-S)l , с выходов блоков 11 и 12 соответственно поступают на четвертый сумматор константы, определяющие ско- gg 13 куда также поступает сигнал с
блока 18 (вычислителя кориолисовых сил), пропорциональный 2mSSci , причем сигнал S по скорости радиального перемещения поступает на блок
К, 91, + Л ., , К2 А,
К,, ,,-f- A4 ; 4 5 ; - некоторые заранее выбранные
рость затухания между программным и текущим положением регулируемой величины (Re A; 0, i 1,2,3,4);
и -- напряжение на двигателе; С - постоянная величина;
- I, + I,,.,
соответственно постоянные моменты инерции механизма вращения и руки манипулятора относитель- -но оси, проходящей через
его центр масс и параллельной вертикальной оси вращения.
С блока 1 задания программы на входы первого и второго сумматоров 2 и 4 поступают программные сигналы, пропорциональные управляюп1им координатам S и C.J) соответственно, Одно
временно на эти же сумматоры с первого и второго датчиков 6 и 15 положения поступают сигнсшы, пропорциональные текущим значениям управляющих координат S и Cf . На выходах сумматоров 2 и 4 формируются сигналы рассогласования (S - S) и (cf-Lf). Сигнал с первого сумматора 2 поступает на усилитель 3 с коэффициентами усиления К4К (т), выходные сигналы (S - S) поступают на инвертирующий вход третьего сумматора 9. На входы сумматора 9 поступают также корректирующие сигналы с выходов усилителя 8 и вьгаислительного блока 17
(вычислителя дед1тробежных сил), соответственно пропорциональные К,Кс
J J
(т) S и mSq) , причем сигнал по угловой скорости снимается с датчика 16 скорости. Сформированный сигнал .
с выхода датчика 7 скорости. Сфор- мированньш сигнал управления C,U, с выхода четвертого сумматора 13 поступает на привод 14 вращения и устраняет возникшее рассогласование. Сформированные сигналы управления обеспечивают асимитотически устойчивое движение манипулятора по заданной программной траектории.
Формула изобретения
Устройство для управления манипулятором, содержащее последовательно соединенные блок задания программы, первый сумматор и первый усилитель, первый привод, связанный с первым датчиком положения, выход которого подключен к второму входу первого сумматора и первому входу первого вычислительного блока, соединенного втрым входом с выходом датчика усилия и вторым входом первого усилителя, второй сумматор, первый вход которо- го подключен к второму выходу блока задания программы, а второй вход - к выходу второго датчика положения, связанного с вторым приводом, отличающееся тем, что, с це- лью повышения точности, оно содержит второй и третий вычислительные блоки, первый блок умножения , а также
5 0 5 0
последовательно соединенные первьш датчик скорости,, связанный с первым приводом, второй усилитель и третий сумматор, последовательно подключенные второй датчик скорости, связанный с вторым приводом, второй блок умножения и четвертый сумматор, выход которого соединен с входом второго привода, второй вход - с выходом третьего вычислительного блока, а третий вход - с выходом первого блока умножения, подключенного первым входом к выходу второго сумматора, а вторым входом к выходу первого вычислительного блока и второму входу второго блока умножения, выход третьего сумматора соединен с входом первого привода, второй вход - с выходом первого усилителя, а третий вход - с выходом второго вычислительного блока, первый вход которого подключен к выходу второго датчика скорости и первому входу третьего вычислительного блока, второй вход - к выходу первого датчика положения и второму входу третьего вычислительного блока, а третий вход - к выходу датчика усилия, второму входу второго усилителя и третьему входу третьего вьмислитель- ного блока,соединенного четвертым входом с выходом первого датчика скорости.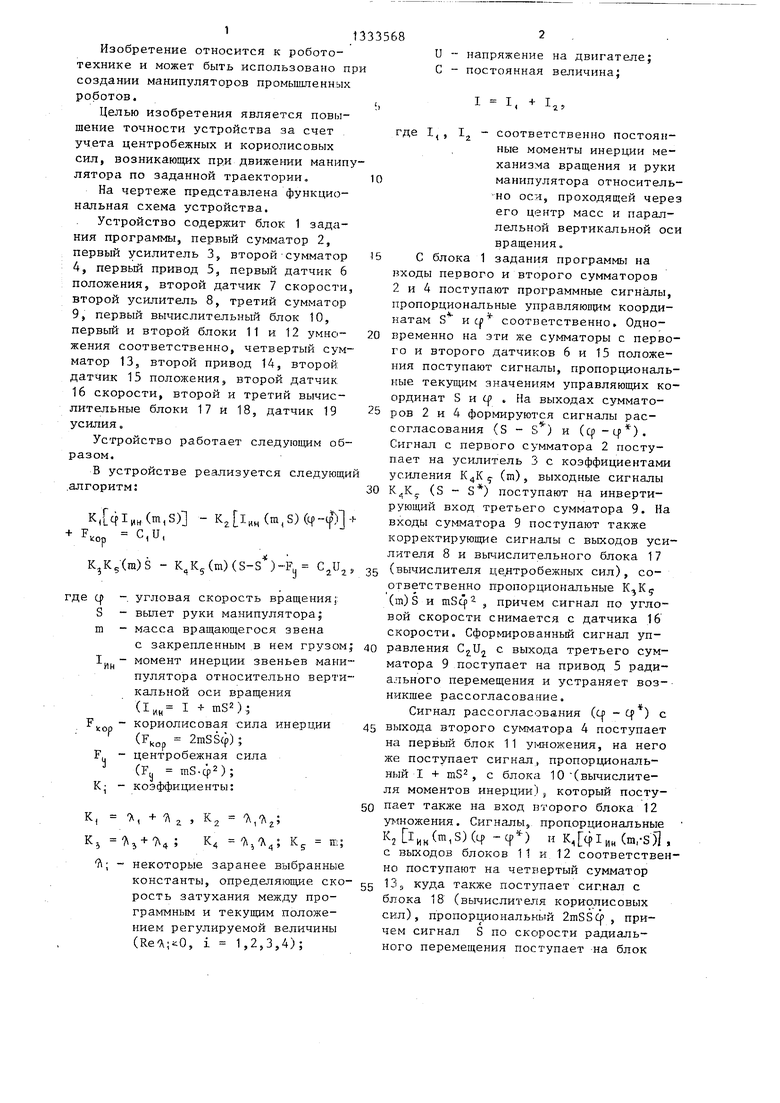

| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Следящая система с переменным моментом инерции | 1986 |
|
SU1322228A1 |
| Устройство для измерения нагрузочного момента электропривода | 1981 |
|
SU993058A1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1987 |
|
SU1594464A1 |
| Следящий электропривод с переменным моментом инерции | 1987 |
|
SU1406565A1 |
| Устройство для управления приводом робота | 1983 |
|
SU1142810A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1472249A1 |
Изобретение относится к робототехнике и может быть использовано при создании манипуляторов промьш- ленных роботов. Целью изобретения является повьппение точности устройства за счет учета центробежных и кори- олисовых сил, возникающих при движении манипулятора по заданной траектории.. Устройство содержит блок задания программы, приводы перемещения и вращения исполнительного органа, датчики обратной связи, блоки вычисления моментов инерции центробежных и кориолисовых сил, а также датчик усилия. 1 ил. (Л 00с со ел 05 00
| Под ред | |||
| Я.А.Шифрина | |||
| Промышленная робототехника | |||
| М.: Машиностроение, 1982, с | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
| Устройство для автоматического управления роботом-манипулятором | 1975 |
|
SU597552A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
