1
Изобретение относится к системам автоматического управления и pei-ули- рования и может быть использовано для улучшения качества функционирова ния автоматических систем, в частности в системах автоматического регулирования процессов металлообработки.
Цель изобретения - улучшение качества процесса регулирования за счет повьппения быстродействия системы.
На фиг. 1 представлена структурная схема системы; на фиг. 2 - процессы, иллюстрирующие работу системы.
Система (фиг. 1) содержит -задат- чик 1 входного сигнала, делитель 2 напряжения, второй релейный элемент 3, регулятор 4, третий релейный элемент 5, коммутатор 6, элемент 7 задержки, исполнительное устройство 8, объект 9 регулирования, датчик 10, первый релейный элемент 11, усили
1322230
исполнительного устройства 8 с выходом первого сумматора 15, а с помощью nepaoi o релейного . элемента 11 на интеграторе регулятора 4 устанав, ливаются нулевые начальные условия интегрирования. При этом на входы первого сумматора 15 поступают сигнал рассогласования .j(t) A-y(t) с третьего сумматора 13 и сигнал
10 от задатчика 1 входного сигнала,прошедший через усилитель 12 с регулируемым коэффициентом усиления k .
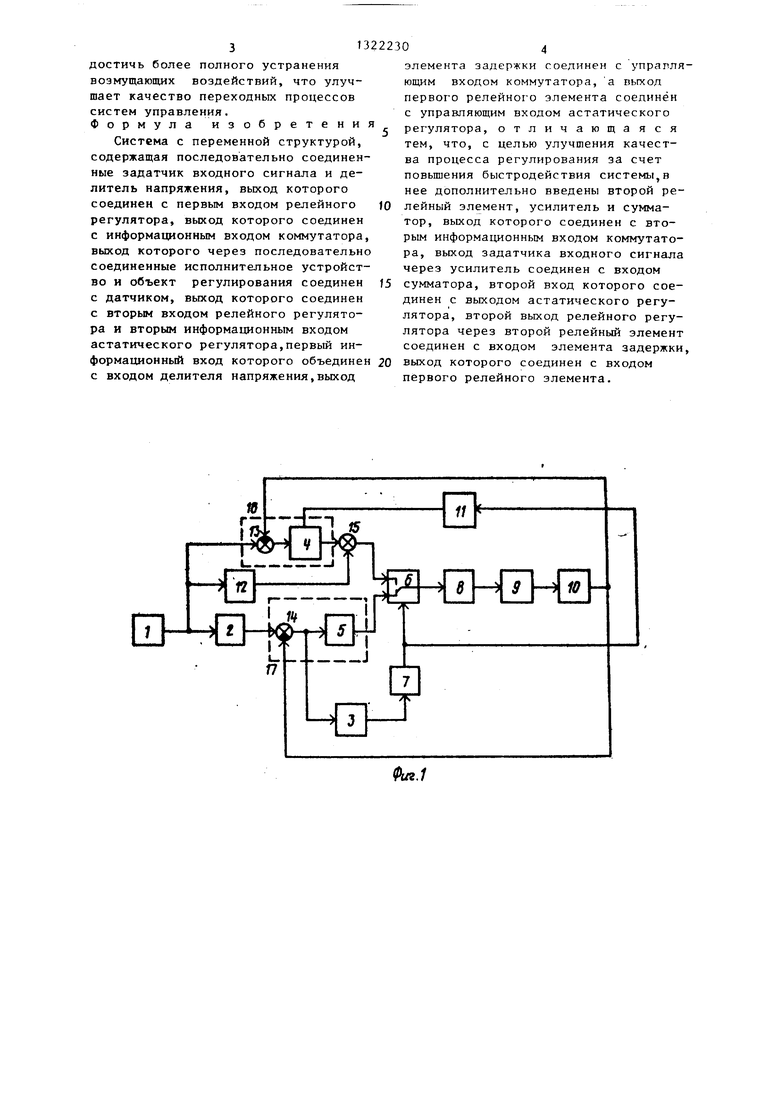
В устройстве момент переключения t, регулируется с помощью коэффици15 ента деления k,, а момент переключения t определяется временем задерж ки «t . Введение первого сумматора 15 и усилителя 12 с коэффициентом
и„
20
усиления мент tЦ
позволяет в мосформировать требуемый сиг нал и. Параметры регулятора 4,на интеграторе которого сигнал с выхода элемента 7 задержки с помощью пер
ливает в момент
тель 12, третий 13, второй 1А и пер- 25 вого релейного элемента 11 устанав- вый 15 сумматоры, астатический 16 и релейный 17 регуляторы.
Система работает следующим образом.
Сигнал требуемого уровня А от за- 30 датчика 1 входного сигнала проходит через делитель 2 напряжения с коэффициентом деления kj (k 7/ 1) и поступает вместе с сигналом y(t) от датчика 10 на входы второго сумматора 14. Полученный сигнал рассогласова2 нулевые начальные условия, настраиваются так,чтобы устранить влияние различного рода возмущающих воздействий..
Характерный вид переходных процессов в отсутствии неконтролируемых возмущений представлен на фиг. 26 .(кривая 18 - для предлагаемой системы, кривая 2 для известной).
Кроме того, в известной системе ненулевые начальные условия на интеграторе регулятора 4 в момент t, включения регулятора 4 существенно усложняют ее настройку. Они обуслов- вы- 40 лены работой интегратора в течение промежутка Г с момента t
35
ния (t) :--- y(t) поступает
1 на третий 5 и второй 3 релейные элевы
менты (второй релейный элемент 3 рабатьшает сигнал лишь в том случае, если величина y(t) достигает значения A/kn). Первоначально коммутатор 6 соединяет выход третьего релейного элемента 5 с входом исполнительного устройства 8, и управляющий сигнал начинает форсированно изменять управляемую величину объекта 9 регулирования. В момент t (фиг. 2), когда g (t) О, выходной сигнал третьего релейного элемента 5 меняет полярность, а сигнал с выхода второго релейного элемента 3, .проходя через элемент 7 задержки с регулируемым временем задержки Т ,поступает на коммутатор 6 и первый релейный элемент 11, управляя их подвижными конвы-
В
момент
коммутатор 6 соединяет вход
Ч
1322230
исполнительного устройства 8 с выходом первого сумматора 15, а с помощью nepaoi o релейного . элемента 11 на интеграторе регулятора 4 устанавливаются нулевые начальные условия интегрирования. При этом на входы первого сумматора 15 поступают сигнал рассогласования .j(t) A-y(t) с третьего сумматора 13 и сигнал
от задатчика 1 входного сигнала,прошедший через усилитель 12 с регулируемым коэффициентом усиления k .
В устройстве момент переключения t, регулируется с помощью коэффициента деления k,, а момент переключения t определяется временем задержки «t . Введение первого сумматора 15 и усилителя 12 с коэффициентом
и„
усиления мент tЦ
позволяет в мосформировать требуемый сигнал и. Параметры регулятора 4,на интеграторе которого сигнал с выхода элемента 7 задержки с помощью перливает в момент
25 вого релейного элемента 11 устанав-
- 30 2 нулевые начальные условия, настраиваются так,чтобы устранить влияние различного рода возмущающих воздействий..
Характерный вид переходных процессов в отсутствии неконтролируемых возмущений представлен на фиг. 26 .(кривая 18 - для предлагаемой системы, кривая 2 для известной).
Кроме того, в известной системе ненулевые начальные условия на интеграторе регулятора 4 в момент t, включения регулятора 4 существенно усложняют ее настройку. Они обуслов- - 40 лены работой интегратора в течение промежутка Г с момента t
35
,, когда
первым релейным элементом 11 с помощью сигнала от второго релейного элемента 3 устанавливаются нулевые
45 условия интегрирования. Использова- ние постоянной времени интегратора для настройки контура воспроизведения задающей величины ухудшает динамические свойства системы управ50 ления относительно возмущающих воздействий, так как их устранение теперь проводится с помощью меньшего числа варьируемых параметров астатического регулятора 16.
Таким образом, применение предлагаемой системы, позволяет по сравнению с известной повысить быстродействие автоматических систем и
313
достичь более полного устранения воэмущаюпшх воздействий, что улучшает качество переходных процессов систем управления. Формула изобретени
Система с переменной структурой, содержащая последовательно соединенные задатчик входного сигнала и делитель напряжения, выход которого соединен с первым входом релейного регулятора, выход которого соединен с информационным входом коммутатора, выход которого через последовательно соединенные исполнительное устройство и объект регулирования соединен с датчиком, выход которого соединен с вторым входом релейного регулятора и вторым информационным входом астатического регулятора,первый ин
элемента задержки соединен с упр ющим входом коммутатора, а выхо первого релейного элемента соеди с управляющим входом астатическо регулятора, отличающая тем, что, с целью улучшения каче ва процесса регулирования за сче повышения быстродействия системы нее дополнительно введены второй лейный элемент, усилитель и сумм тор, выход которого соединен с в рым информационным входом коммут ра, выход задатчика входного сиг через усилитель соединен с входом сумматора, второй вход которого динен с выходом астатического ре лятора, второй выход релейного р лятора через второй релейный элем соединен с входом элемента задер
формационный вход которого объединен 20 выход которого соединен с входом
с входом делителя напряжения,вькод
элемента задержки соединен с упралля ющим входом коммутатора, а выход первого релейного элемента соединён с управляющим входом астатического регулятора, отличающаяся тем, что, с целью улучшения качества процесса регулирования за счет повышения быстродействия системы,в нее дополнительно введены второй релейный элемент, усилитель и сумматор, выход которого соединен с вторым информационным входом коммутатора, выход задатчика входного сигнала через усилитель соединен с входом сумматора, второй вход которого соединен с выходом астатического регулятора, второй выход релейного регулятора через второй релейный элемент соединен с входом элемента задержки
выход которого соединен с входом
первого релейного элемента.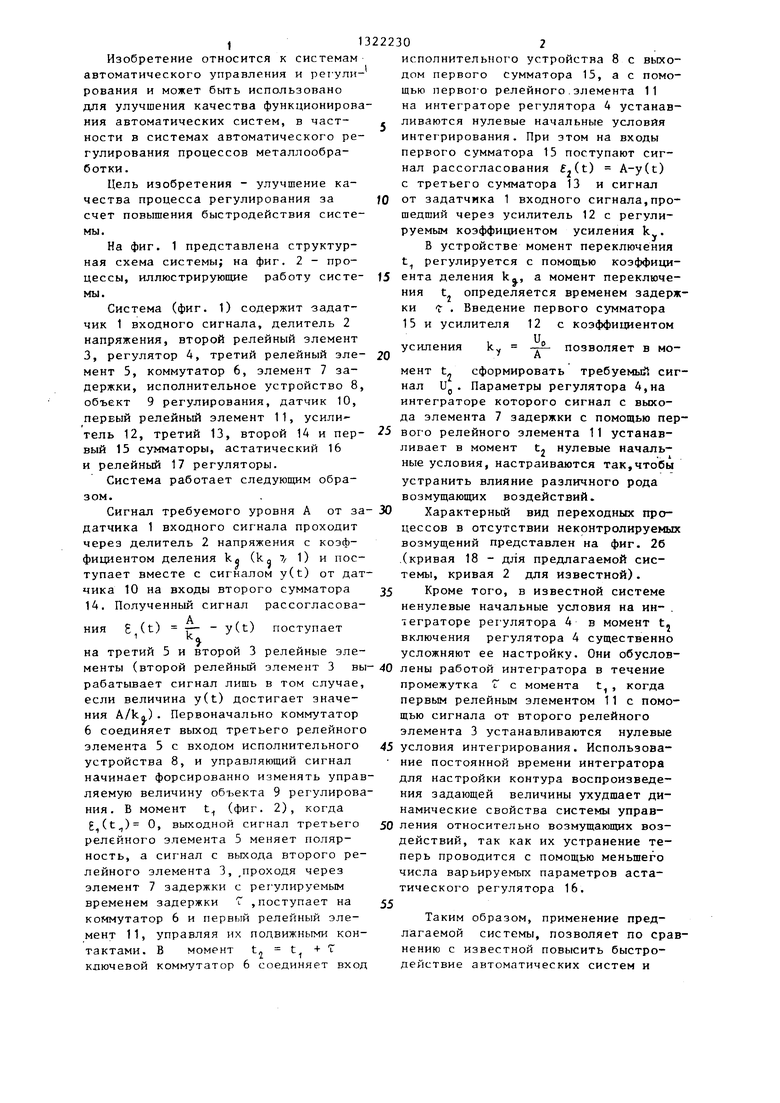
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения режущего инструмента | 1978 |
|
SU783760A2 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для регулирования положения режущего инструмента | 1976 |
|
SU594487A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для настройки регуляторов | 1980 |
|
SU938256A1 |
| Многоканальный регулятор | 1983 |
|
SU1092472A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
Изобретение относится к области 1:истем автоматического регулирования и может быть использовано, в частности, в системах регулирования процессов металлообработки. Целью изобретения является улучшение качества процесса регулирования за счет повышения быстродействия системы. Устройство содержит задатчик входного сигнала, делитель напряжения, три релейных элемента, релейный регулятор,регулятор, астатический регулятор,коммутатор, три сумматора, элемент задержки, исполнительное устройство, датчик и усилитель. Сущность изобретения заключается в придании процессу регулирования за счет введения усилителя и сумматора оптимальных свойств, присущих релейным оптимальным регуляторам. 2 ил. (Л оо 1C 1C to со
/I Фиг.2
| Теория систем с переменной структурой./Под ред | |||
| С.В.Емельянова | |||
| - М.: Наука, 1970, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Устройство для регулирования положения режущего инструмента | 1978 |
|
SU783760A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
