Изобретение относится к сельскохозяйственному машиностроению, в частности к плодоуборочной технике для непрерьгеной уборки плодов.
Цель изобретения - повышение производительности плодоуборочного комбайна путем повышения надежности выполнения технологиг еского процесса подбора с земли контейнеров.
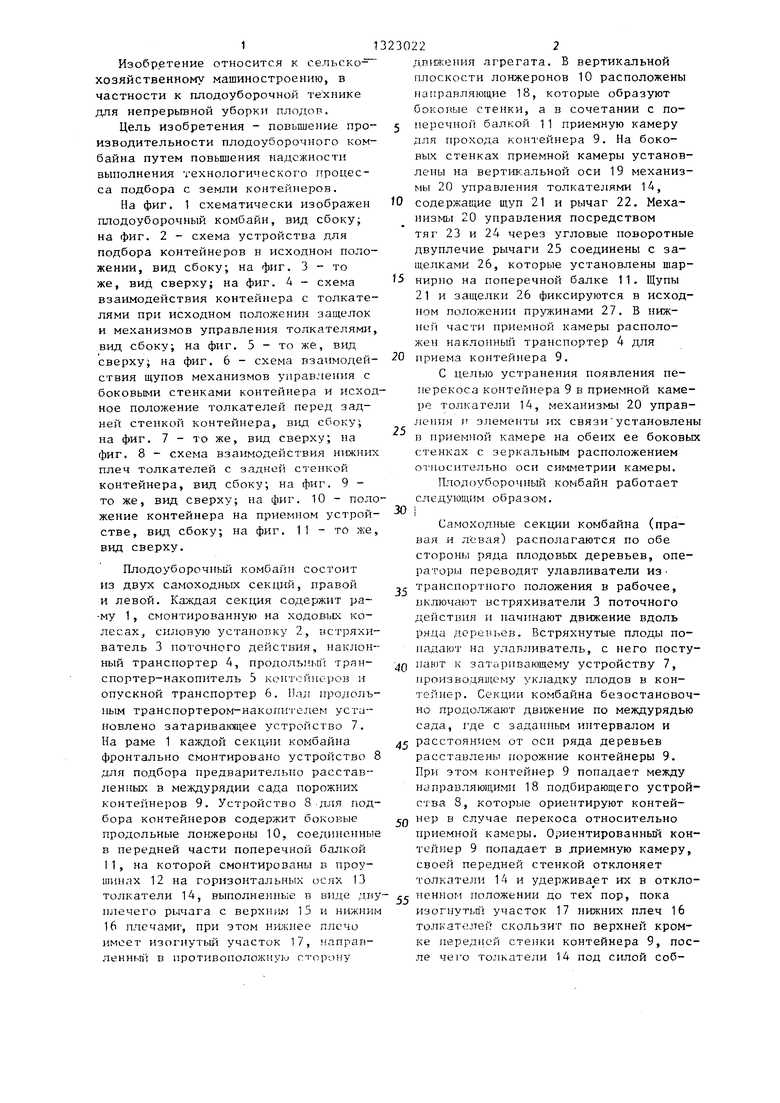
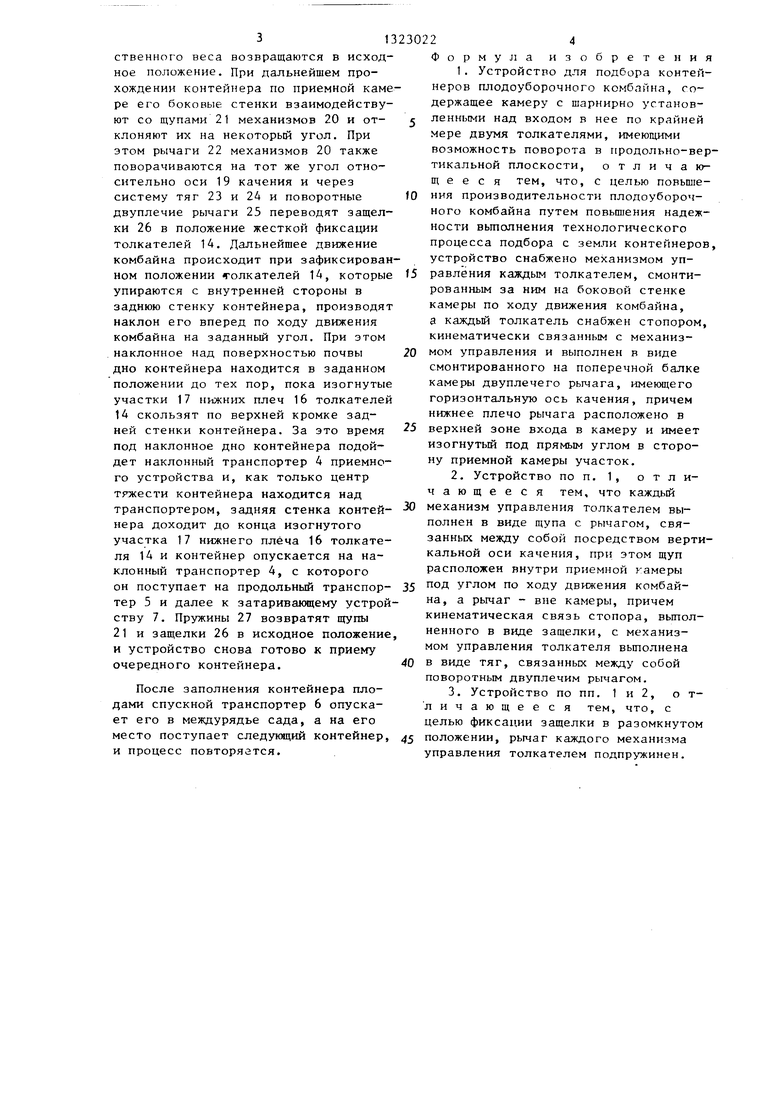
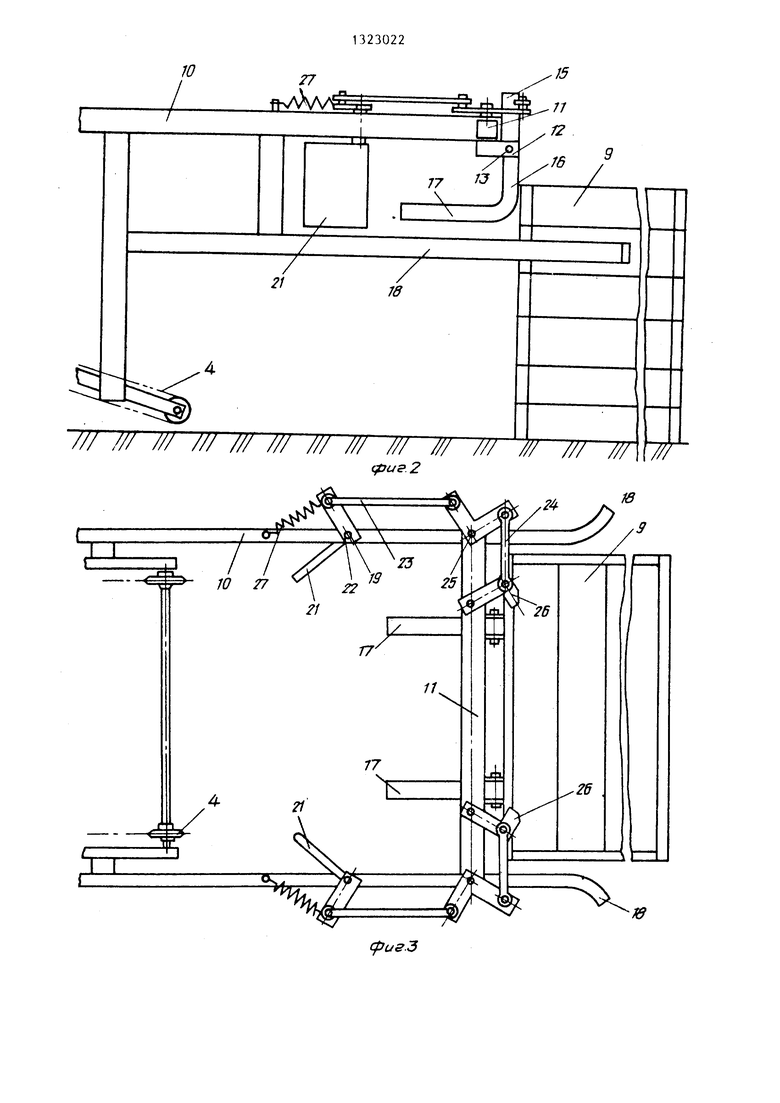
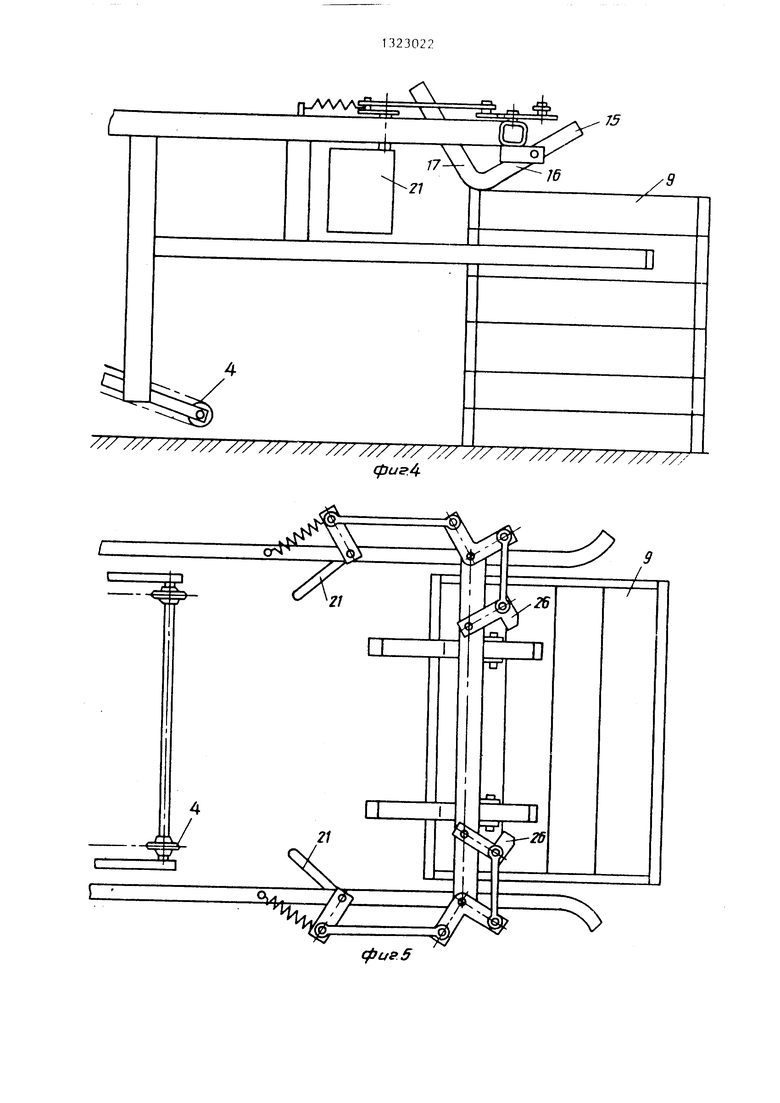
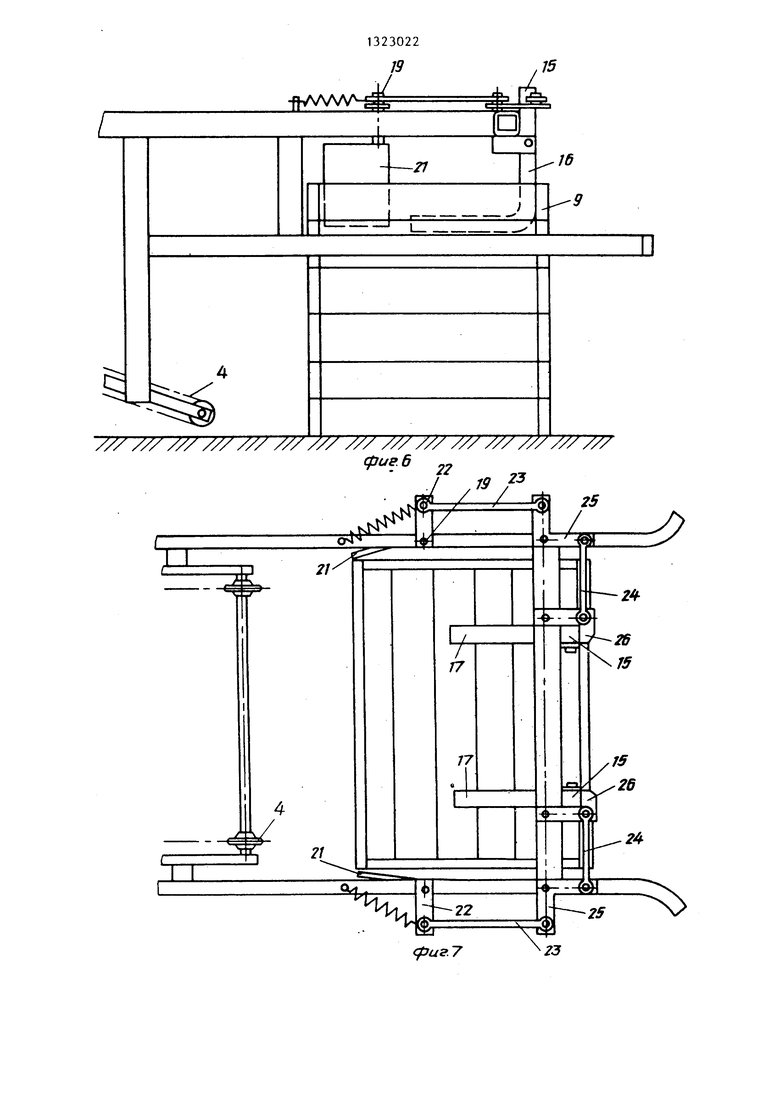
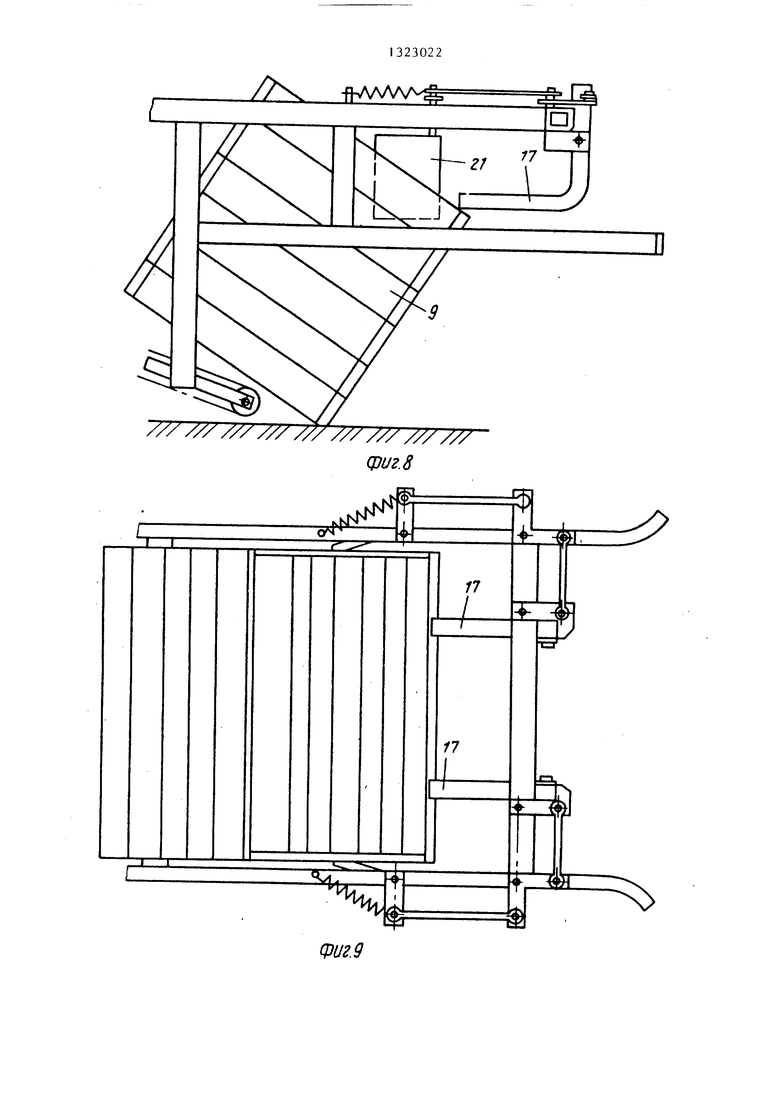
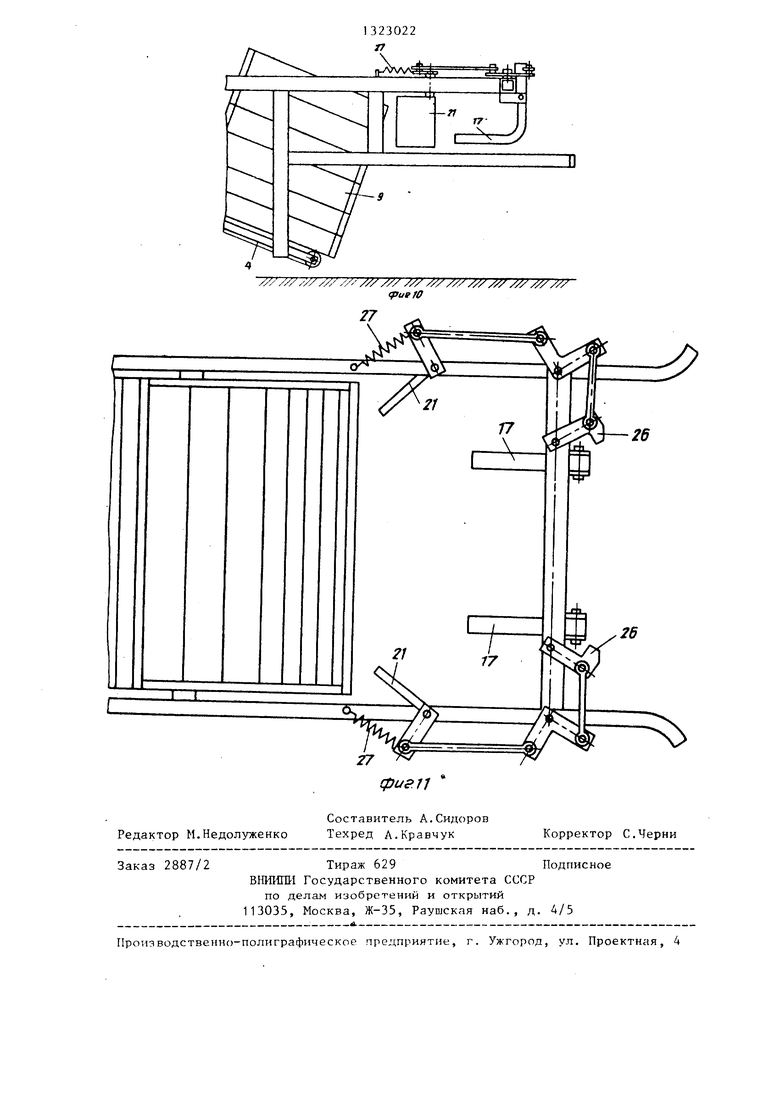
На фиг. 1 схематически изображен плодоуборочный комбайн, вид сбоку; на фиг. 2 - схема устройства для подбора контейнеров и исходном положении, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - схема взаимодействия контейнера с толкателями при исходном положении защелок и механизмов управления толкателями, вид сбоку; на фиг. 5 - то же, вид сверху; на фиг. 6 - схема взаимодействия щупов механизмов управления с боковыми стенками контейнера и исходное положение толкателей перед задней стенкой контейнера, вид сбоку; на фиг. 7 - то же, вид сверху; на фиг. 8 - схема взаимодействия нижних плеч толкателей с задней стенкой контейнера, вид сбоку, на фиг. 9 - то же, вид сверху; на фиг. 10 - положение контейнера на приемном устройстве, вид сбоку; на фиг. 11 - то же, вид сверху.
Плодоуборочньш комбайн состоит из двух самоходных секций, правой и левой. Каждая секция содержит ра- -му 1, смонтированную на ходовых колесах, силовую установку 2, истряхи- ватель 3 поточного действия, наклонный транспортер 4, продолы ьп транспортер-накопитель 5 кент1: йиеров и опускной транспортер 6, Над продольным транспортером-накопич слем установлено затаривающее устройство 7. На раме 1 каждой секции комбайна фронтально смонтировано устройство 8 для подбора предварительно расставленных в междурядий сада порожних контейнеров 9. Устройство 8 .для подбора контейнеров содержит боковые продольные лонжероны 10, соединенные в передней части поперечной балкой II, на которой смонтированы в проушинах 12 на горизонтальных осях 13 толкатели 14, выполненные в виде двуплечего рычага с BepxiusM 15 и нижним 16 плечами , при этом нюкнее плечо имеет изогнутый участок 17, напрап- ленньп в пpoтивoпoлo кнy J сторону
5
0
5
дв1М{ения агрегата. В вертикальной плоскости лонжеронов 10 расположены направляющие 18, которые образуют боковые стенки, а в сочетании с поперечной балкой 11 приемную камеру для прохода контейнера 9. На боковых стенках приемной камеры установлены на вертикальной оси 19 механизмы 20 управления толкателями 14, содержащие щуп 21 и рычаг 22. Механизмы 20 управления посредством тяг 23 и 24 через угловые поворотные двуплечие рычаги 25 соединены с защелками 26, которые установлены шар- нирно на поперечной балке 11. Щупы 21 и защелки 26 фиксируются в исходном положении пружинами 27. В нижней части приемной камеры расположен наклонный транспортер 4 для приема контейнера 9.
С целью устранения появления пене рекоса контейнера 9 в приемной камере толкатели 14, механизмы 20 управления и элементы их связи установлены в приемной камере на o6eiix ее боковых стенках с зеркальным расположением относительно оси симметрии камеры. Плодоуборочный комбайн работает следующим образом.
0 1
Самоходные секции комбайна (правая и левая) располагаются по обе стороны ряда плодовьк деревьев, операторы переводят улавливатели из
г транспортного положения в рабочее, Бключгшт встряхиватели 3 поточного действия и начинают движение вдоль ряда деревьев. Встряхнутые плоды попадают на улавливатель, с него постуд пан)т к затаривающему устройству 7, производящему укладку плодов в контейнер. Секции комбайна безостановочно продолжают движение по междурядью сада, г де с заданным интервалом и
г; расстоянием от оси ряда деревьев расставлень порожние контейнеры 9. При этом контейнер 9 попадает между направляющими 18 подбирающего устройства 8, которые ориентируют контейQ нер в случае перекоса относительно приемной камеры. Ориентированный контейнер 9 попадает в дриемную камеру, своей передней стенкой отклоняет толкатели 14 и удерживает их в откло ненном положении до тех пор, пока изогнутьй участок 17 нгокних плеч 16 толкателей скользит по верхней кромке передней сте1П и контейнера 9, после чего толкатели 14 под силой собственного веса возвращаются в исходное положение. При дальнейшем прохождении контейнера по приемной камере его боковые стенки взаимодействуют со щупами 21 механизмов 20 и от- клоняют их на некоторый угол. При этом рычаги 22 механизмов 20 также поворачиваются на тот же угол относительно оси 19 качения и через систему тяг 23 и 24 и поворотные двуплечие рычаги 25 переводят защелки 26 в положение жесткой фиксации толкателей 14. Дальнейшее движение комбайна происходит при зафиксированном положении толкателей 14, которые упираются с внутренней стороны в заднюю стенку контейнера, производят наклон его вперед по ходу движения комбайна на заданный угол. При этом наклонное над поверхностью почвы дно контейнера находится в заданном положении до тех пор, пока изогнутые участки 17 нижних плеч 16 толкателей 14 скользят по верхней кромке задней стенки контейнера. За это время под наклонное дно контейнера подойдет наклонный транспортер 4 приемного устройства и, как только центр Т5ткести контейнера находится над транспортером, задняя стенка контей- нера доходит до конца изогнутого участка 17 нижнего плеча 16 толкателя 14 и контейнер опускается на наклонный транспортер 4, с которого он поступает на продольный транспор- тер 5 и далее к затаривающему устройству 7. Пружины 27 возвратят щупы 21 и защелки 26 в исходное положение и устройство снова готово к приему очередного контейнера.
После заполнения контейнера плодами спускной транспортер 6 опускает его в междурядье сада, а на его место поступает следующий контейнер, и процесс повторяется.
Формула изобретени 1. Устройство для подбора контейнеров плодоуборочного комбайна, содержащее камеру с шарнирно установленными над входом в нее по крайней мере двумя толкателями, имеющими возможность поворота в продольно-вертикальной плоскости, отличающееся тем, что, с целью повьшш- ния производительности плодоуборочного комбайна путем повышения надежности вьтапнения технологического процесса подбора с земли контейнеров устройство снабжено механизмом управления каждым толкателем, смонтированным за ним на боковой стенке камеры по ходу движения комбайна, а каждый толкатель снабжен стопором, кинематически связанным с механизмом управления и выполнен в виде смонтированного на поперечной балке камеры двуплечего рычага, имеющего горизонтальную ось качения, причем нижнее плечо рычага расположено в верхней зоне входа в камеру и имеет изогнутый под прямым углом в сторону приемной камеры участок.
2.Устройство по п. 1, отличающееся тем, что каждый механизм управления толкателем выполнен в виде щупа с рычагом, связанных между собой посредством вертикальной оси качения, при этом щуп расположен внутри приемной камеры под углом по ходу движения комбайна, а рычаг - вне камеры, причем кинематическая связь стопора, вьтол- ненного в виде защелки, с механизмом управления толкателя выполнена
в виде тяг, связанных между собой поворотным двуплечим рычагом.
3.Устройство по пп. 1 и 2, отличающее ся тем, что, с целью фиксации защелки в разомкнутом положении, рычаг каждого механизма управления толкателем подпружинен.
Ю
27 fbAX/V
pec
X
/5
;/
X
./
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |
| Копирующее устройство для работы в междурядьях растений | 1989 |
|
SU1699363A2 |
| Комбайн для поточной уборки плодов | 1983 |
|
SU1183018A1 |
| Устройство для автоматического управления прицепной плодоуборочной машиной | 1988 |
|
SU1570668A1 |
| Комбайн для поточной уборки плодов | 1986 |
|
SU1405725A2 |
| Устройство для обработки почвы в рядах растений | 1981 |
|
SU988209A1 |
| Плодоуборочная машина | 1986 |
|
SU1419583A1 |
| Сельскохозяйственная тележка с донным транспортером для перевозки сеносоломистых материалов | 1982 |
|
SU1102518A1 |
| ЗАТАРИВАТЕЛЬ ПЛОДОВ | 1992 |
|
RU2093977C1 |
| Плодоуборочная машина | 1987 |
|
SU1604226A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к плодоуборочной технике для непрерывной уборки плодов. Целью изобретения является повьш1ение производительности плодоуборочного комбайна путем повышения надежности выполнения технологического процесса подбора с земли контейнеров. Самоходный плодоуборочный комбайн в передней части рамы 1 снабжен устройством 8 для автоматического подбора с земли предварительно расставленных с заданным интервалом порожних контейнеров 9. При подходе к контейнеру 9 комбайн толкателями 14 наклоняет его и удерживает в наклоненном положении до тех пор, пока транспортер 4 войдет под дно контейнера 9, после чего контейнер опускается на наклонный транспортер 4 и подается к затаривающему устройству 7. После заполнения площади контейнер 9 спускается транспортером 6 в междурядье сада. 2 3.п. ф-лы. 11 ил. S |СЛ 7777 W Wr//// //////////////// //// //// ///А//// fpuff. 1 74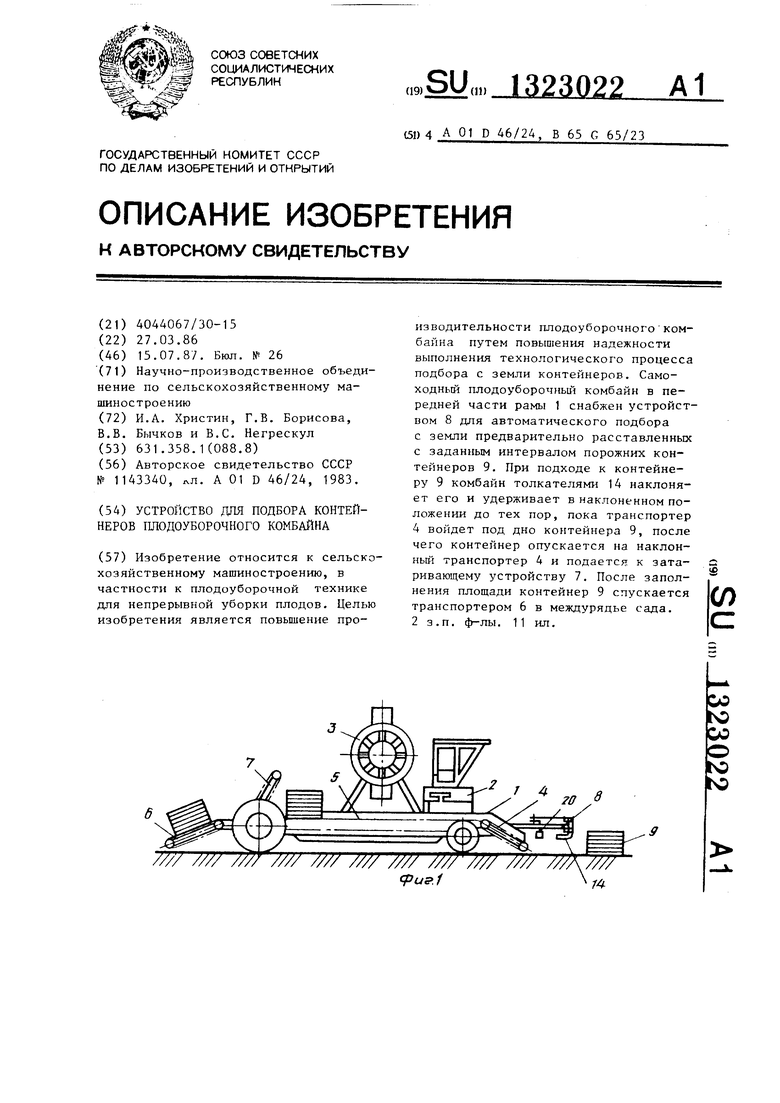
/// /// /// Ш /// /// /// /// ///
/// 7/.
UT&
CfJu8.3
/// ////// /// /// /// /// /// /// ////////////////// //////
(pueS
1323022
19
г4
15
/////////////////////////////////////////////
срие.6 уу
I 19 2
/ / /
Р15Й / /
.„и
//
cpus.7
//V -ftwWA
///////////////////////////
фиг. 8
ra
фиг.9
/// /// /// /// /Л ////// //7 /// //7 ///////// (ftuffff
Составитель А.Сидоров Редактор М.Недолуженко Техред А.Кравчук
Заказ 2887/2
Тираж 629Подписное
ВНИИГО1 Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиги
Корректор С.Черни
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
