(21) 4)59409/30-15 (2) 10,12.86 () 30.08.88. Бюл. № 32
(71)Саратовский институт механизации сельского хозяйства им,М.И.Калинина
(72)В.И.Дмитриенко, И.М.Федотов, В.Г.Бросалин и В.М.Стариков
(53) 631.358.1(088.8) (56) Патент ГДР № 146885, кл. А 01 D 46/00, 1981.
Авторское свидетельство СССР 11А3340, кл. А 01 D 46/24, 1985.
(54) ШЮДОУБОРОЧНАЯ МАШИНА (57) Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является повьппение производительности и упрощение конструкции, Плодоуборочная машина состоит из двух одинаковых секций правой и левой. Каждая секция имеет раму, которая установлена на ходовую часть. На раму монтируются кабина, пневматический стряхиватель плодов, улавливатель плодов, трансмиссия, система транспорте
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |
| Улавливатель плодоуборочной машины | 1982 |
|
SU1055399A1 |
| Плодоуборочная машина | 1979 |
|
SU990124A1 |
| Машина для сбора плодов | 1985 |
|
SU1335172A1 |
| Плодоуборочная машина | 1987 |
|
SU1468462A1 |
| Плодоуборочная машина | 1976 |
|
SU627779A1 |
| Приспособление для выгрузки заполненной тары на плодоуборочной машине | 1989 |
|
SU1713479A1 |
| Плодоуборочная машина | 1987 |
|
SU1604226A1 |
| Устройство для подбора контейнеров плодоуборочного комбайна | 1986 |
|
SU1323022A1 |
| Плодоуборочная машина | 1983 |
|
SU1123584A1 |
79
;з
(Л
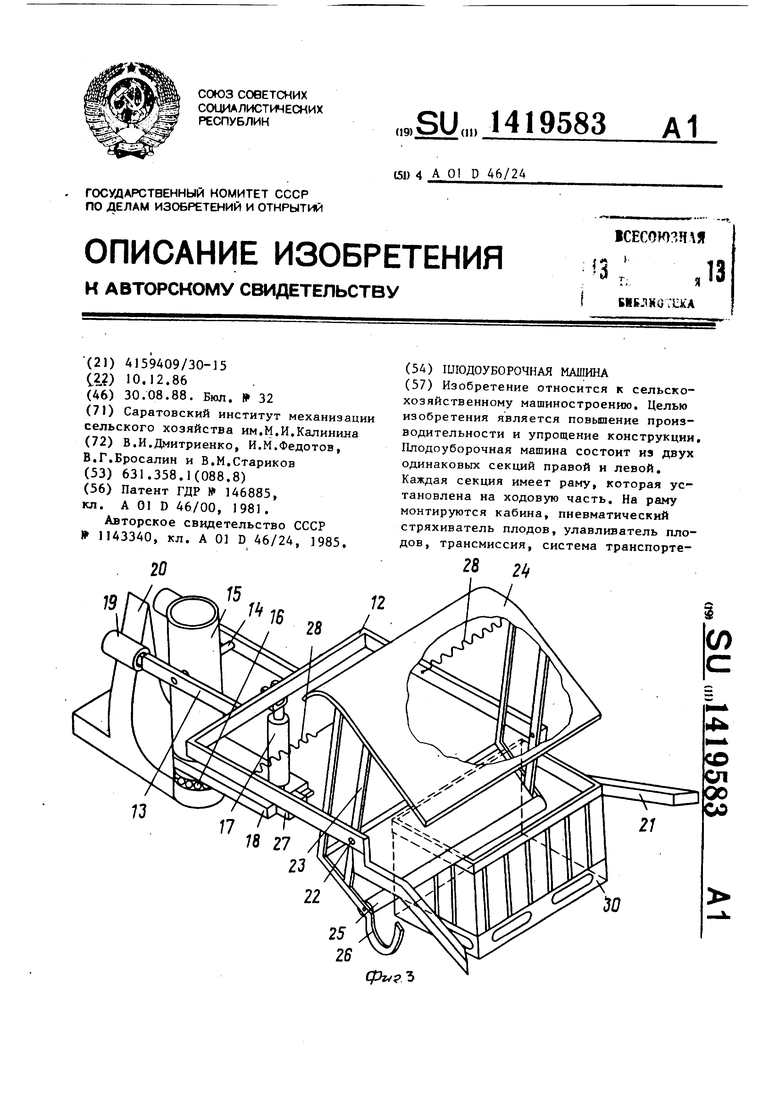
ров, устройство для забора и подъема порожних контейнеров, рольганг. Устройство для забора и подъема порожних контейнеров состоит из рамки 12 с рычагами 13 и может перемещаться в вертикальной плоскости. Рычаги 13 :- снабжены роликами 19, взаимодействующими при подъеме с клином 20. В передней части рамки 12 установлены ловители контейнеров 21 и имеется приспособление для захвата контейнеров, состоящее из L-образных рычагов 23, на верхних клетках которых консольно закреплен опорный щит 24, а на нижнем плече - толкающий ролик 25, Конец 26 нижнего плеча рычага 23 при его пово1
Изобретение относится к сельскохозяйственному мащиностроению, а имен- -но к машинам для поточной уборки плодов садовых культур.
Цель изобретения - повьшение про- изводительности и упрощение конструк ЦИИ.
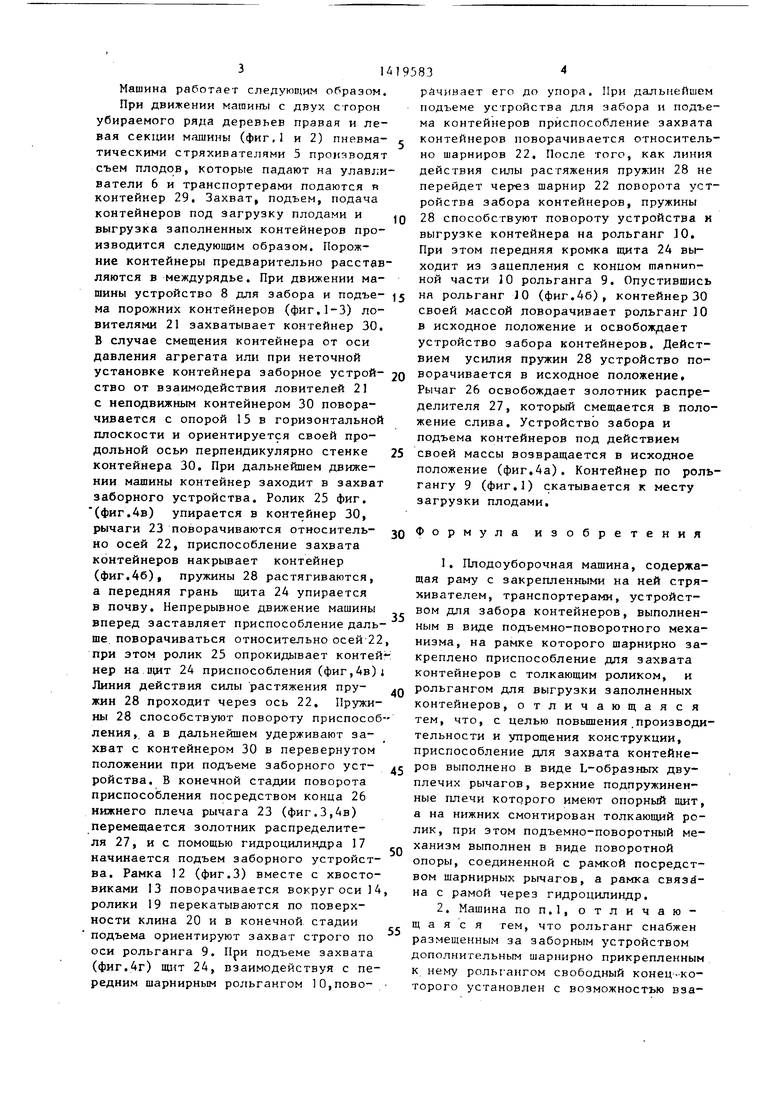
На фиг. изображена правая секция плодоуборочной мащины, вид сбоку; на фиг.2 - то же, ВИ|Д в плане; на фиг.З- приспособление для захвата контейнеров; на фиг.4 - процесс захвата, подъема и подачи контейнеров,
Плодоуборочная мащина состоит из двух одинаковых секций - правой и левой. Каждая секция смонтирована на . самоходном модуле и включает в себя раму 1 (фиг.1 и 2), на которой смонтирована силовая установка 2, Рама J установлена на ходовую часть 3. На раму J монтируются кабина 4, пневматический стряхиватель 5 плодов, улавливатель 6 плодов, трансмиссия, система транспортеров 7, устройство 8 для забора и подъема порожних контейнеров рольганг 9. К передней части основного рольганга 9 шарнирно крепится рольганг 0, имеющий ограниченное за счет упора (не показан) перемещение в вер- тикальной плоскости вокруг щарнира.
Устройство для забора и подъема порожних контейнеров (фиг,3) состоит ; из рамки 12 с рычагами J3, которыми
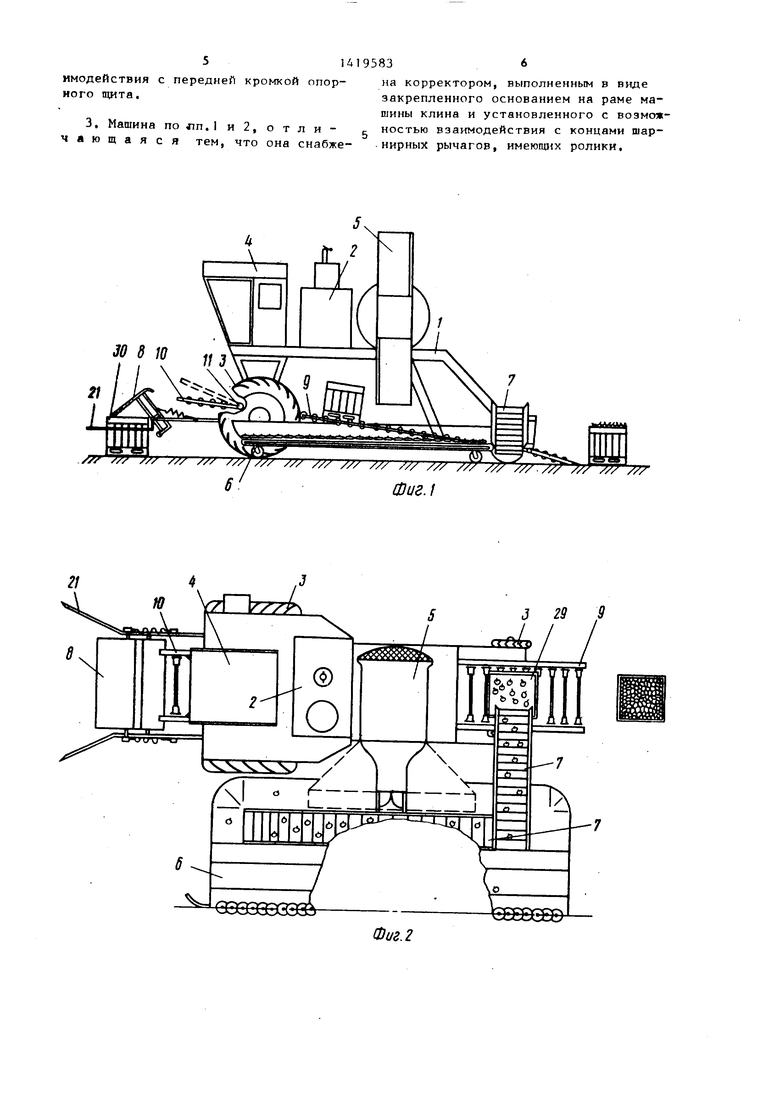
роте взаимодействует с золотником распределителя 27. Верхние плечи L- образных рычагов 23 связаны с рамкой 12 посредством пружины 28. При движении мащины ловители 21 захватывают контейнер 30, при этом ролик 25 упирается в контейнер, и рычаги 23 поворачиваются, и приспособление захвата контейнеров накрьшает контейнер. Непрерьшное движение мащины вперед заставляет приспособление дальще поворачиваться, и ролик 25 опрокидывает контейнер на щит 24. Начинается подъем заборного устройства. 2 з.п.ф-лы, А ил.
посредством оси 14 она закреплена на опоре J5, установленной на раме мащины посредством подщипника 16. Рам ка 12 имеет возможность перемещаться в вертикальной плоскости относительно оси 14 посредством гидроцилиндра 17, щарнирно закрепленного на крошптей- не 18 опоры 15, а в горизонтальной плоскости вместе с опорой 15 - относительно, рамы 1 мащины. Рычаги 13 рам- ки 12 снабжены роликами 19, взаимодействующими при подъеме рамки 12 с боковыми гранями закрепленного своим основанием на раме мащины
клина 20, который вместе с роликами 19 является корректором приспособления для захвата коитейнеров относительио рольгангов 9 (фиг.1). В передней части рамки 12 (фиг,3) установлены ловители 22 контейнеров 21. На рамке 12 устройства забора и п)дъема контейнеров посредством шарниров 22 установлено приспособление для захвата контейнеров, состоящее из L-образных рычагов 23, на верхних плечах которых консольно закреплен опорный щит 24, а на нижнем плече - толкающий ролик 25, Конец 26 нижнего плеча рычага 23 при его повороте взаимодействует с золотником распределителя 27 (фиг,4в). Верхние плечи L-образиых рычагов 23 связаны с рамой 12 посредством пружины 28.
Машина работает следуюп им образом. При движении машины с двух сторон убираемого ряда деревьев правая и левая сек1щи машины (фиг,1 и 2) пневматическими стряхивателями 5 производят съем плодов, которые падают на улавливатели 6 и транспортерами подаются я контейнер 29, Захват, подъем, подача контейнеров под загрузку плодами и выгрузка заполненных контейнеров производится следующим образом. Порожние контейнеры предварительно расставляются в междурядье. При движении машины устройство 8 для забора и подъема порожних контейнеров (фиг.1-3) ловителями 21 захватывает контейнер 30. В случае смещения контейнера от оси давления агрегата или при неточной установке контейнера заборное устройство от взаимодействия ловителей 21 с неподвижным контейнером 30 поворачивается с опорой 15 в горизонтальной плоскости и ориентируется своей продольной осью перпендикулярно стенке контейнера 30. При дальнейшем движении машины контейнер заходит в захват заборного устройства. Ролик 25 фиг. (фиг.4в) упирается в контейнер 30, рычаги 23 поворачиваются относительно осей 22, приспособление захвата контейнеров накрьшает контейнер (фиг.4б), пружины 28 растягиваются, а передняя грань щита 24 упирается в почву. Непрерывное движение машины вперед заставляет приспособление дальше, поворачиваться относительно осей 22 при этом ролик 25 опрокидывает контей иер на В1ит 24 приспособления (фиг,4в)1 Линия действия силы растяжения пружин 28 проходит через ось 22. Пружины 28 способствуют повороту приспособления, а в дальнейшем удерживают захват с контейнером 30 в перевернутом положении при подъеме заборного устройства. В конечной стадии поворота приспособления посредством конца 26 нижнего плеча рычага 23 (фиг.3,4в) перемещается золотник распределителя 27, и с помощью гидроцилиндра 17 начинается подъем заборного устройства. Рамка 12 (фиг.З) вместе с хвостовиками 13 поворачивается вокруг оси 14 ролики 19 перекатываются по поверхности клина 20 и в конечной стадии подъема ориентируют захват строго по оси рольганга 9. При подъеме захвата (фиг.4г) щит 24, взаимодействуя с передним шарнирным рольгангом 10,пово0
5
0
5
рйчивает его до упора. При дальнейшем подъеме устройства для забора и подъема контейнеров приспособление захвата контейнеров поворачивается относительно шарниров 22. После того, как линия действия силы растяжения пружин 28 не перейдет чер«з шарнир 22 поворота устройства забора контейнеров, пружины 28 способствуют повороту устройства и выгрузке контейнера на рольганг JO. При этом передняя кромка щита 24 выходит из зацепления с концом тяпнип- ной части 10 рольганга 9. Опустившись на рольганг JO (фиг.4б), контейнер 30 своей массой поворачивает рольганг 10 в исходное положение и ocвoбoж aeт устройство забора контейнеров. Действием усилия пружин 28 устройство поворачивается в исходное положение. Рычаг 26 освобождает золотник распределителя 27, который смещается в положение слива. Устройство забора и подъема контейнеров под действием своей массы возвращается в исходное положение (фиг.4а). Контейнер по рольгангу 9 (фиг.1) скатывается к месту загрузки плодами.
30 Формула изобретения
0
5
0
5
514195836
имодействия с передней кромкой опор- на корректором, выполненным в виде ного щита.закрепленного основанием на раме машины клина и установленного с воэмож3, Машина по лп.1 и2, отли- с ностью взаимодействия с концами шар- чающаяся тем, что она снабже- нирныХ рычагов, имеющих ролики.
21
J 29 9
Фиг.2
M
55s
5 S
c
