Изобретение относится к пвсоз& в товительным машинам и может быть использовано в лесной промышленности.
Целью изобретения является улучшение эксплуатационных характеристик путем снижения динамических нагрузок при погрузке.
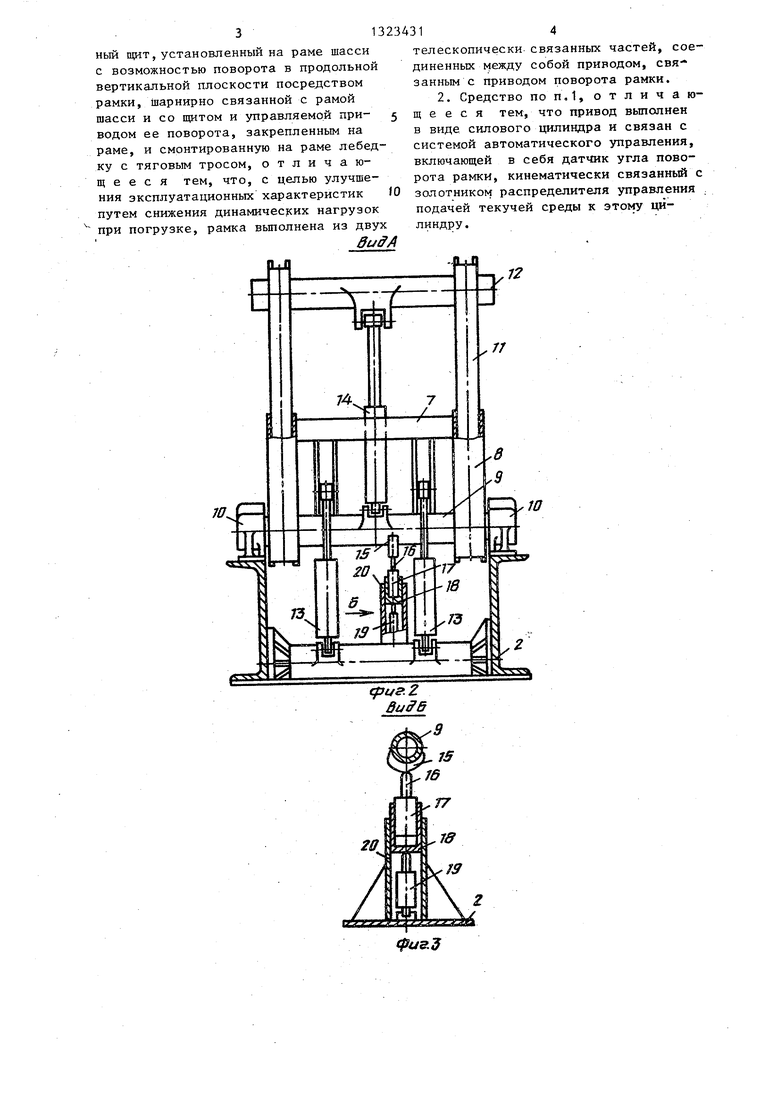
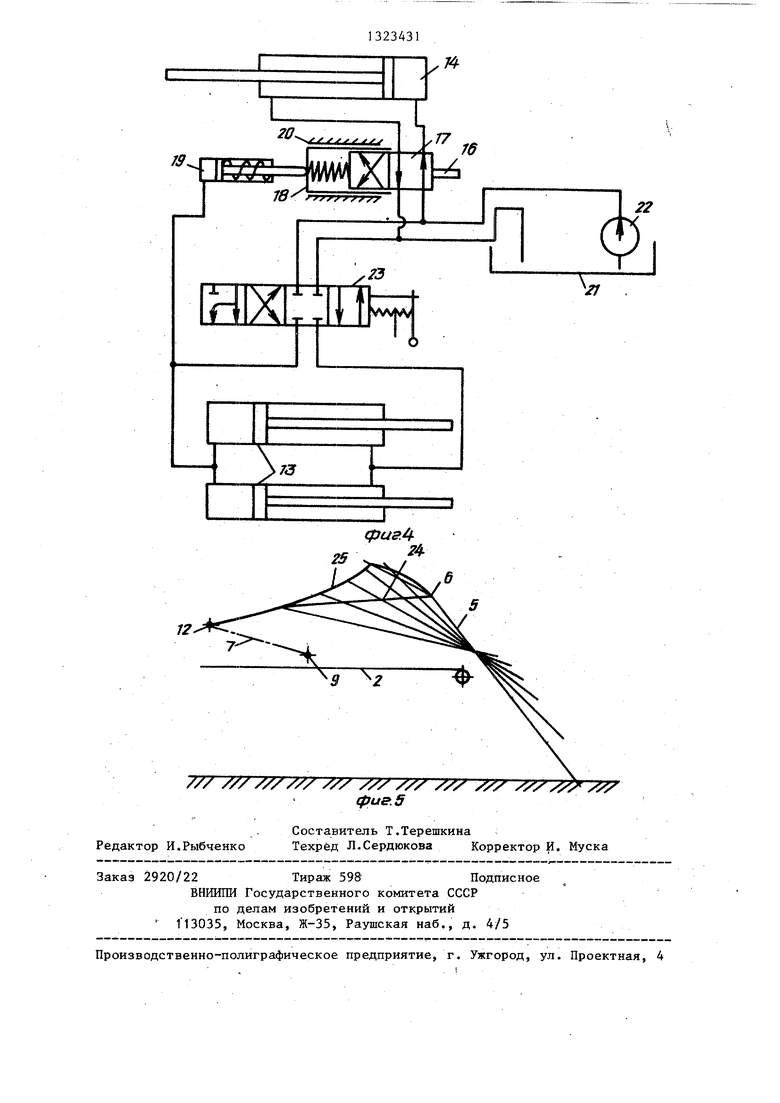
На фиг.1 представлено транспортное средство для трелевки леса, вид сбоку; на фиг.2 - вид А на фиг.1; на фиг.З - вид Б на фиг.2; на - схема гидропривода цилиндра изменени длины раздвижной поворотной рамки; н фиг.З - кинематическая схема перемещения поворотной рамки и щита.
Транспортное средство включает самоходное шасси 1, раму 2, лебедку 3 с тяговым тросом 4, погрузочный 5 с коником 6, установленный на раме 2 через раздвижную поворотную рамку 7. Последняя состоит из нижней части 8, которая через ось 9 связана с кронштейнами 10, закрепленными на раме 2, и верхней части 11, которая связана осью 12 с погрузочным щитом 5. Привод раздвижной поворотной рамки 7 осуществлен гидродилиндрами 13, установленными на раме 2. Верхняя часть 11 и нижняя часть 8 разд-. вижной поворотной рамки 7 входят одна в другую и связаны между собой гидроцилиндром 14 изменения длины раздвижной поворотной рамки 7. Для управления гидроцилиндром 14 на оси раздвижной поворотной рамки 7 закреплен датчик 15 угла ее поворота. Датчик 15 представляет собой двойной эксцентрик, кинематически связанный с золотником 16 гидрораспределитбитя 17 управления гидроцилиндром 14. Гидрораспределитель 17 установлен в стакане 18, последний с помощью гидроцилиндра 19 может перемещаться по направляющим 20, закрепленным на раме 2. Гидрораспределитель 17 В1спю- чен в схему управления гидроцилиндрами 13, имеющую бак 21, насос 22 и
гидрораспределитель 23. 1
Транспортное средство работает
следуюш 1м образом.
Транспортное средство подъезжает к пачке деревьев или отдельно поваленным деревьям. Оператор, управляя гидрораспределителем 23, приводит в действие гидроциливдры 13, которые поворачивая раздвижную поворотную ра ку 7 вокруг оси 9, при растормож ен- ной лебедке 3 опускают погрузочный
5
0
5
0
5
0
5
0
5
щит 5 с коником 6 до его упора в грунт. При этом гидроцилиндром 19 ; принудительно через стакан 18 золотник 16 гидрораспределителя 17 прижимается к двойному эксцентрику (датчику) 15, удерживая таким образом через гидрораспределитель 17 шток гидроцилиндра 14 в вьщвинутом положении и раздвюкную поворотную рамку 7 в раздвинутом положении. Затем зацепляют пачку деревьев тросами-чоке- рами и при помощи Лебедки 3 и грузового троса 4 затаскивают ее на коник
6погрузочного щита 5. После погрузки пачки на коник 6 оператор гидрораспределителем 23 переводит гидроцилиндры 13 в плавающее положение. Пачку деревьев с погрузочным щитом
5 затаскивают тяговым тросом 4 лебедки 3 на раму 2 машины„ Оператор переводит в плавающее положение и гидроцилиндр 19. Гидрораспределитель 17 со стаканом 18 несколько перемещаются ,в направляющих 20,так что золотник 16 остается в контакте с датчиком 15 и переключенным на втягивание штока гидроцилиндром 14„ При дальнейшем затаскивании пачки деревьев с погрузочным ш;итом 5 поворачивается раздвижная поворотная рамка
7с датчиком 1-5 и золотник 16 гидрораспределителя 17 переключает- гидроцилиндр 14 на выталкивание штока, так как с золотником 16 начинает контактировать эксцентрик большего диаметра датчика 15. За счет автоматического переключения гидроцилиндра 14 с положения втягивания штока на выталкивание штока с помощью датчика 15 коник 6 погрузочного щита 5 движется по траектории (см. фиг.З), близкой к траектории 24, а ось 12 раздвижной поворотной рамки 7 -.по траектории, близкой к .траектории 25. На месте разгрузки растормаживается тяговый трос 4 лебедки 3, транспортное средство отъезжает вперед, и пачка деревьев под собственным весом и за счет сил сопротивления волочению ее по земле опускается на земпю. После отцеплення пачки деревьев тяговый трос 4 затягивается лебедкой 3 на погрузочный щит 5 и цикл трелевки повторяется.
Формула изобретения
1. Транспортное средство для трелевки деревьев, содержащее погрузоч3132343
ный щит, установленный на раме шасси с возможностью поворота в продольной вертикальной плоскости посредством рамки, шарнирно связанной с рамой шасси и со щитом и управляемой приводом ее поворота, закрепленным на
раме, и смонтированную на раме лебедку с тяговым тросом, отличающееся тем, что, с целью улучшения эксплуатационных характеристик W путем снижения динамических нагрузок при погрузке, рамка вьтолнена из двух
телескопически связанных частей, соединенных собой приводом, связанным с приводом поворота рамки.
2. Средство по п,1, отличающееся тем, что привод вьтолнен в виде: силового цилиндра и связан с системой автоматического управления, включающей в себя датчик угла поворота рамки, кинематически связанный с зoлoтникo f распределителя управления подачей текучей среды к этому цилиндру.
72
ept/ff.2 BiiffB
15
(pus.3
6
77/ //////Л / /У/ /У/
(ffue.5
Редактор И.Рыбченко
Составитель Т.Терешкина
Техред Л.Сердюкова Корректор И. Муска
Заказ 2920/22Тираж 598Подписное
ВНИИ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4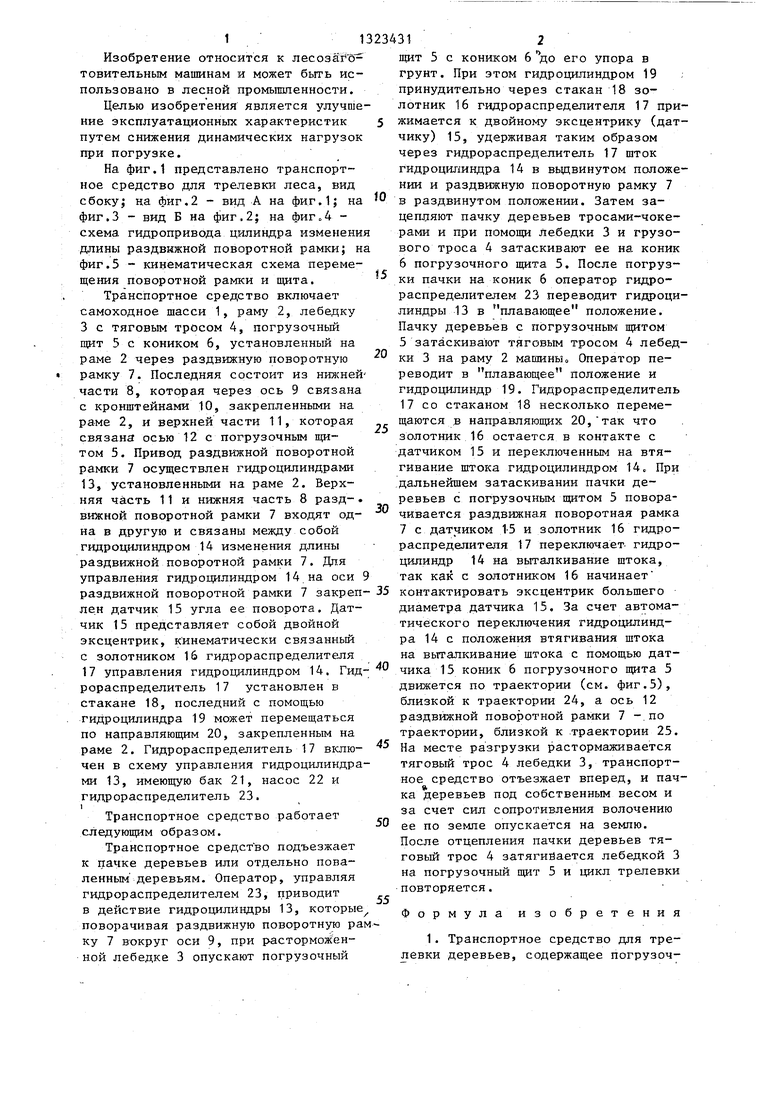
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНОЕ УСТРОЙСТВО ТРЕЛЕВОЧНОГО ТРАКТОРА | 1992 |
|
RU2061603C1 |
| Погрузочный щит трелевочного трактора | 1985 |
|
SU1258728A1 |
| Устройство для бесчокерной трелевки деревьев | 1987 |
|
SU1428624A1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ, ПОГРУЗКИ И ТРАНСПОРТИРОВКИ ДЕРЕВЬЕВ | 1965 |
|
SU175343A1 |
| ПОГРУЗОЧНОЕ УСТРОЙСТВО ТРЕЛЕВОЧНОЙ МАШИНЫ | 1991 |
|
RU2021923C1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| Транспортное средство для перевозки лесоматериалов | 1984 |
|
SU1164104A1 |
| Лесозаготовительная машина | 1982 |
|
SU1074448A1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2007 |
|
RU2357407C2 |
| Треловочный трактор | 1990 |
|
SU1782811A1 |
Изобретение относится к лесоза- -готовительным транспортным средствам. Цель изобретения улучшение эксплуатационных характеристик путем снижения динамических нагрузок при погрузке. Транспортное средство для трелевки деревьев содержит погрузочный щит 5, установленный на раме 2 шасси 1 с возможностью поворота в продольной вертикальной плоскости посредством рамки 7. Последняя шар- нирно связана с рамой 2 шасси 1 и со щитом 5. Привод рамки 7 осуществляется гидроцилиндрами 13, установленными на раме 2. Рамка 7 вьшолнена из двух телескопически связанных частей 8 и 11, соединенных между собой приводом. Последний связан с приводом 13 поворота рамки. Гидроцилиндр привода связан с датчиком угла поворота рамки 7 и кинематически - с золотником гидрораспределителя управления подачи текучей среды. 1 з.п. ф-лы , 5 ил. е (Л 7ff ff.
| Самозаполняющийся ковш | 1961 |
|
SU149866A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Навесное оборудование для бесчокерной трелевки | 1972 |
|
SU439422A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Переносной станок для нарезания резьбы | 1981 |
|
SU1039659A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
