Изобретение относится к грузозах- ватньм устройствам, преимущественно для перегрузки пакетов груза, содержащихся в штабелях.
Цель изобретения - повышение производительности путем улучшения эксплуатационных качеств захвата.
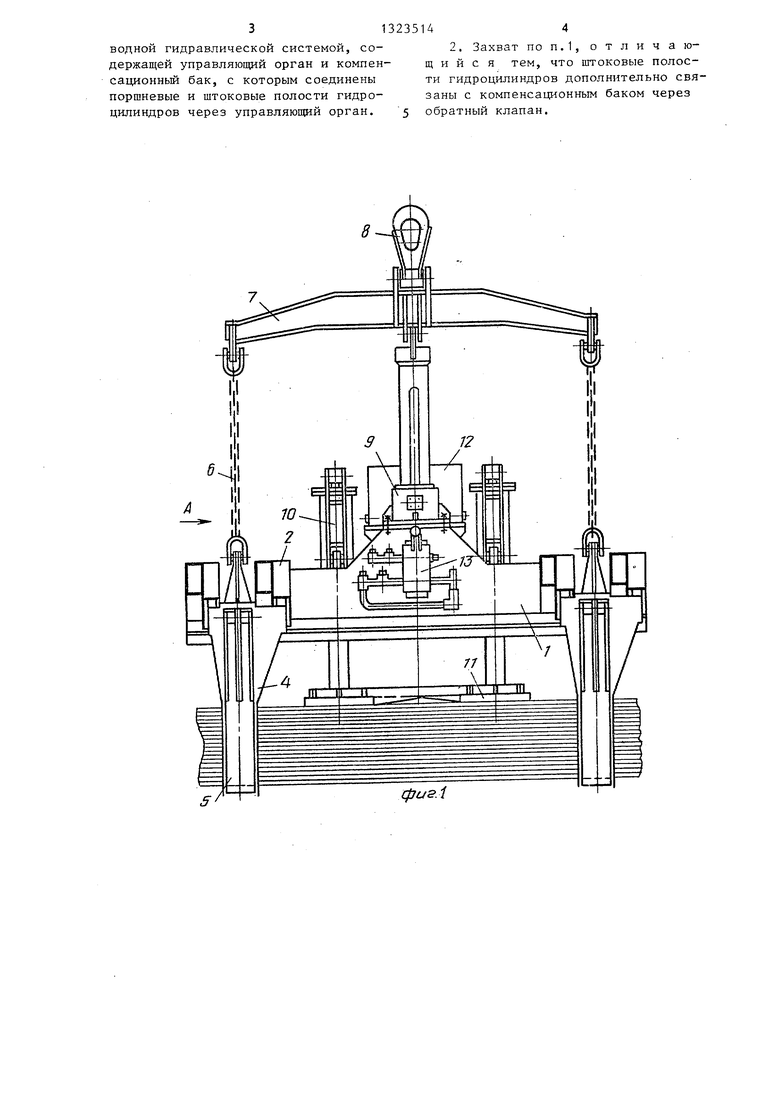
На фип. 1 представлен захват, общий В1Щ; на фиг. 2 - вид А на фиг. 1, на фиг.З - схема бесприводной гидросистемы с упорами в виде гидроцилиндров.
Автоматинеский захват для пакетов груза содержит рану 1 с направляющими 25 в которых перемещаются каретки 3, а в полых стойках 4 размещены под хватные .лапы 5 , выполненные в виде двуплечих рычагов. Цепью 6 подхватны лампы 5 соединены с траверсой 7, имеющей петлю 8 для навешивания на крюк грузоподъемного механизма. Траверса с рамой 1 связаны посредством механима 9 управления. Упоры 10 выполнены в .виде гидроцилиндров, штоки которых имеют опорные башмаки 11, Бесприводная гидросистема содержит компенсационный бак 12, панель управления с управляющим органом (золотником) 13 и обратным клапаном 14.
Автоматический захват для пакетов груза работает следуЕощим образом.
Захват опускают на пакет груза до контакта опорнь1х башмаков 11 упоров 10 с верхним пакетом. Подхватные лапы 5 располагаются выше зазора между пакетами. Настройку захвата на высоту данного пакета производят путем нажатия рычага управляющего органа 13,, при этом обе полости гидроцилиндров соединяются с компенсационным баком 12 и рама 1 захвата подхватными лапами 5 плавно опускается под действием собственного веса до необходимого уровня. Плавность обеспечивается тем, что масло гидросистемы вы жимается из верхних полостей гидроцилиндров и засасывается в нижнее, преодолевая внутреннее сопротивление
трубопроводов и аппаратуры. I
После перекрытия управляющего органа 13 захват останавливается - настройка на высоту пакета закончена
При последующем подъеме траверсы 7, цепи 6 поворачивают подхватные лапы 5 в рабочее положение, каретки перемещаются до соприкосновения стое 4 с боковыми поверхностями пакета. Подхватные лапы размещаются в зазоре
е
.
3 к
Ш
15
20
2.5
30
35
40
45
50
55
под пакетом. Дапьйейший подъем захвата осуществляют вместе с пакетом груза.
Перенастройка упоров 10 для работы с меньшими по высоте пакетами груза производится без опирания опорных башмаков 11 на пакет. Опускаемый захват останавливают, когда подхватные лапы 5 находятся на уровне зазора между пакетами. Нс1жимают рычаг управляющего органа 13, соединяя обе полости гидроцилиндров с компенсационным баком 12. Под действием массы опорных башмаков 11 они опускаются до контакта с пакетом груза. Управляющий орган 13 перекрывают и производят взятие пакета.
При каждом взаимодействии опорных башмаков 11 с пакетом груза масса захвата воспринимается упорами 10, в штоковых полостях гидроцилиндров образуется некоторое разрежение. Под его влиянием в штоковые полости гидроцилиндров через обратный клапан 14 по прямому каналу (в обход управляющего органа 13) перетекает масло из компенсационного бака 12, что предот вращает подсасывание воздуха через уплотнения штоков и улучшает заполнение гидросистем) маслом в процессе наладки.
После укладки пакета груза в железнодорожный вагон или в машину траверсу 7 захвата опускают. Как только цепи 6 ослабнут, подхватные лапы 5 повернутся относительно своих осей и займут место в полой стойке 4 каретки 3, т.е. захват освободится от груза.
При дальнейшем опускании траверсы 7, когда она достигнет своего край него нижнего положения, сработает механизм 9 управления и соединит траверсу 7 с рамой 1. При последующем подъеме траверса 7 будет подниматься с рамой 1, захват вернется в исходное положение. Формула изобретения
1. Автоматический захват для пакетов груза, содержащий раму, на которой смонтированы подхватные лапы, связанньш с траверсой механизм управления и регулируемые по высоте упоры с опорными башмаками, о т л и- чающийся тем, что, с целью повышения производительности путем улучшения эксплуатационных качеств захвата, упоры выполнены в виде гидропилиндров, связанных с беспри31323514
водной гидравлической системой, содержащей управляющий орган и компенсационньй бак, с которым соединены ти гидроцилиндров дополнительно свя поршневые и штоковые полости гидро- заны с компенсационным баком через цилиндров через управляющий орган. 5 обратный клапан.
2. Захват поп.1, отличающийся тем, что штоковые полости гидроцилиндров дополнительно свя заны с компенсационным баком через обратный клапан.
2. Захват поп.1, отличающийся тем, что штоковые полос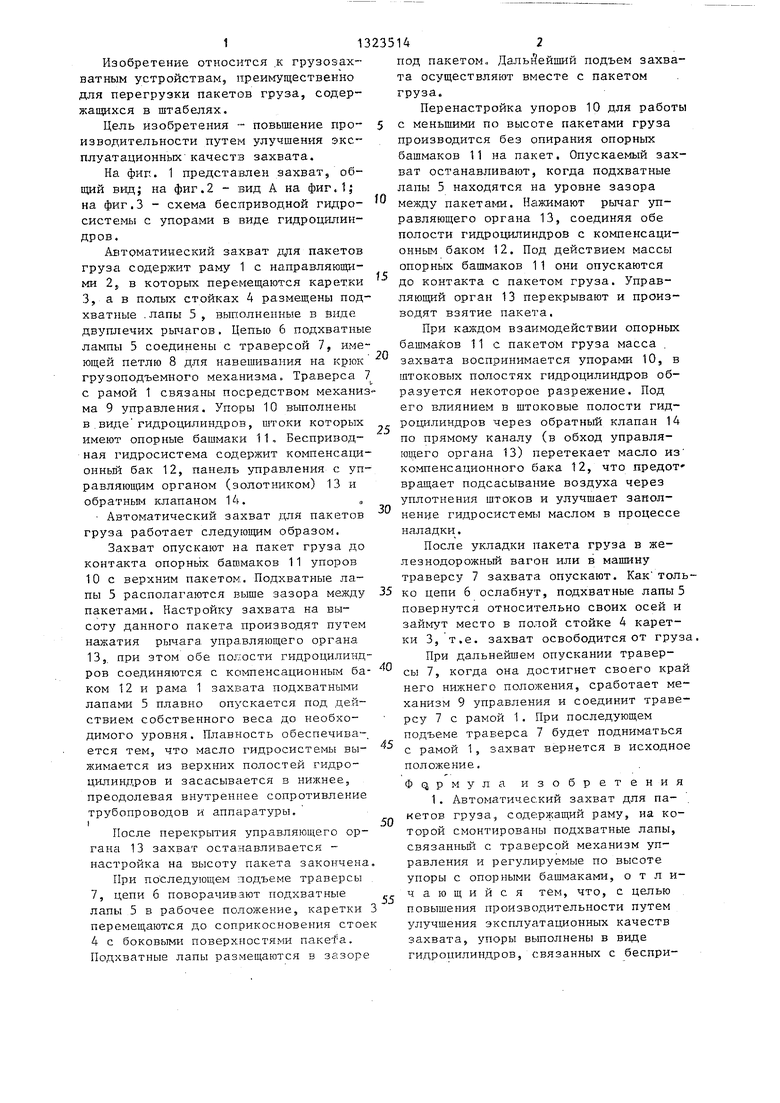
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная траверса | 1987 |
|
SU1470644A1 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| ПРЕСС СРАЩИВАНИЯ ДРЕВЕСИНЫ ПО ДЛИНЕ | 2001 |
|
RU2181662C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
Изобретение относится к грузозахватным устройствам для перегрузки пакетов груза, содержащихся в штабелях. Изобретение позволяет повысить производительность путем улучшения эксплуатационных качеств захвата. Захват содержит подхватные лампы, смонтированные на каретках, раму. Связанную механизмом управления с траверсой, и упоры, выполненные в виде гидроцилиндров, штоки которых снабжены опорными башмаками. Поршневые и штоковые полости гидроцилиндров через управляющий орган соединены с компенсационным баком, кроме того, штоковые полости гидроцилиндров в обход управляющего органа через обратный клапан соединены с компенсационным баком, что улучшает заполнение бесприводной гидросистемы маслом в процессе настройки. Путем нажатия рьгаага управляющего органа после контакта опорных башмаков с пакетом груза производят настройку захвата на определенную высоту пакета. Перенастройка упоров может быть осуществлена и без контакта опорньк башмаков с пакетом. 1 з.п. ф-лы, 3 ил. СЛ
- L J
я
JT
. Составитель Г.Вронская Редактор Ю.Середа Техред И.Попович Корректор В.Бутяга
Заказ 2927/27 Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 0 |
|
SU347279A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
