(54) ЗАХВАТ-КАНТОВАТБЛЬ ТЯЖЕЛОВЕСНЫХ ИЗДЕЛИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1980 |
|
SU992388A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Захват-кантователь | 1986 |
|
SU1310325A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| Захват-кантователь | 1982 |
|
SU1025645A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| Кантователь для загрузки и разгрузки автооператора автоматической линии | 1980 |
|
SU865747A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ ШЛАНГОВ ИЛИ ТРУБОК С ИХ КОНЦЕВОЙ АРМАТУРОЙ | 1991 |
|
RU2022755C1 |
Изобретение относится к области грузозахватных устройств.
Известен захват-кантователь, содержащий траверсу с установленными на ней приводными барабанами, каждый из которых охватывается бесконечной лентой (1. Однако такой кантователь не обладает достаточной надежностью, так как изделие свободно висит на лентах.
Известен захеат-каитователь, содержащий корпус и кантующий механизм с зажимными захватными органами 2. Этот захват также недостаточно надежен в работе и его использование может привести к повреждению изделия.
Известен захват-кантователь, содержащий птраверсу с подвесками, на которых установлен кантующий механизм с захватными органами и поворотным приводом 3.
Известный захват-кантователь не обладает достаточной надежностью и предназначен для одного типа изделий..
Целью изобретения является повышение надежности работы захвата-кантователя при расщиреиии диапазона размеров захватываемых изделий.
Для этого в предлагаемом захвате-кантователе кантующий механизм содержит корпус Oj
центральным отверстием, по периметру которого установлены ловители в виде трехгранных призм, а в плоскости корпуса, перпендикулярно оси изделия, жестко смонтированы цапфы, взаимодействующие с подвесками траверсы, при этом одна из цапф снабжена зубчатым венцом, кинематически связанным с поворотным приводом, а захватные органы выполнены в виде установленных на основании корпуса с возможностью возвратно-поступательного движения от двух независимых приводов ползунов, кинематически связанных посредством параллелограммных рычажных систем с зажимными поворотными лапами, причем на корпусе смонтирован механизм для центрироваиия его относительно оси изделия и приспособление для ориентации корпуса относительно центра тяжести изделия.
Кроме того, механизм для центрирования корпуса относительно оси изделия выполнен в виде двух П-образных призм, размещенных, в корпусе и снабженных приводом с эксцентриковым валом, а приспособление для ориентации корпуса относительно центра груза содержит щтанги с отверстиями, смонтированные с возможностью осевого перемещения на краях корпуса, причем на корпусе установлены электромагниты с фиксаторами. взаимОдействующими с отверстиями штанг.
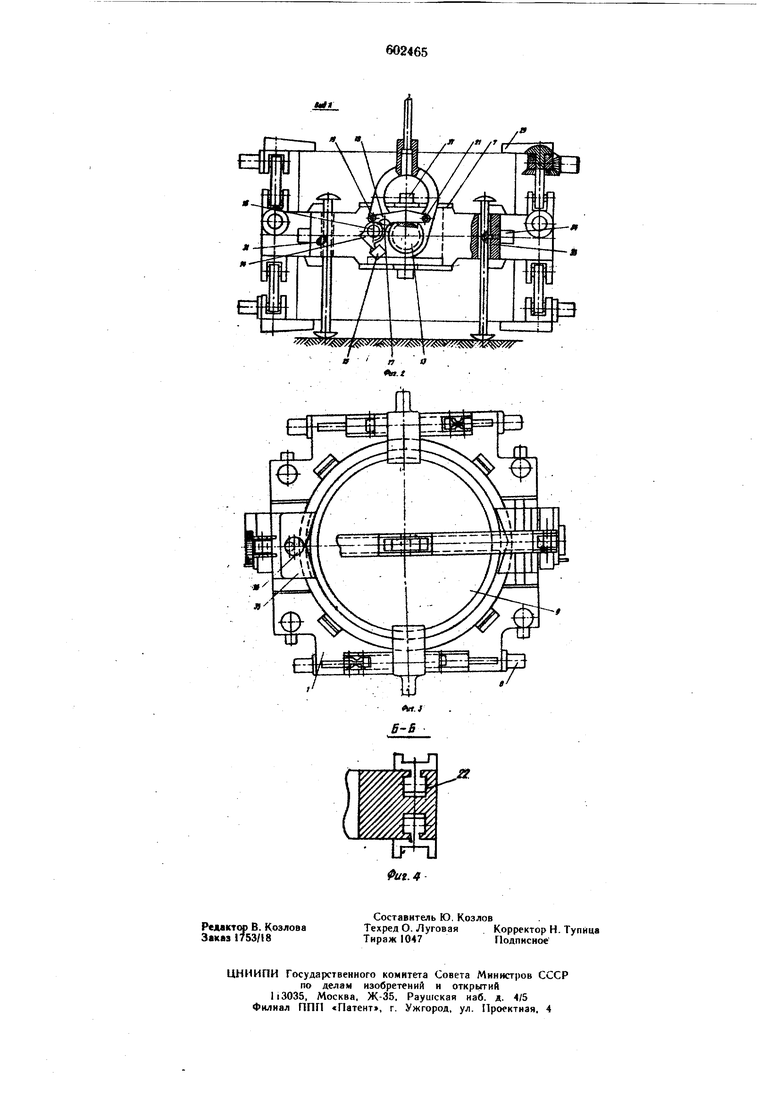
На фиг. 1 .изображен захват-кантователь тяжеловесных изделий, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - захват-кантователь, вид сверху; на фиг. 4 - сечение по Б-Б на фиг. 1.
Захват-кантователь содержит траверсу I, иа подвески 2 которой подвешен кантователь 3, имеющий механизм 4 его поворота, захватный механизм 5, приспособление 6 для ориентации кантователя относительно центра тяжести изделия, механизм 7, центрирующий кантователь относительно оси изделия.
Кантователь содержит корпус 8, представляющий собой четырехугольную плиту с центральным отверстием 9, имеющим цилиндрическую форму.
По периметру отверстия на верхнем и нижнем основаниях корпуса предусмотрены ловители 10, выполненные в виде трехгранных призм. На диаметрально противоположных боковых гранях корпуса предусмотрены цапфы 11 и 12 для навески кантователя на подвески траверсы. Одна из цапф 11 снабжена зубчатым венцом 3, входящим в зацепление с зубчатым колесом 14 механизма 4 поворота кантователя. Механизм 4 поворота содержит шаговый двигатель 15, червячный редуктор, на выходном валу которого установлено цилиндрическое зубчатое колесо 16, входящее в зацепление с упомянутым венцом цапфы 1|осредством паразитной шестерни 17, закрепленной на рычага 18, установленном с возможностью поворота на оси 19, жестко закрепленной на подвеске 2. На второй подвеске смонтирован аналогичный рычаг 20 без паразитной шестерни. Оба рычага фиксируются щтырямн 21, обеспечивающими одновременно зацепление колеса 16 редуктора с зубчатым венцом 13 цапфы II и удержание подвесок 2 в цапфах 11 и 12 кантователя.
На основаниях корпуса выполнены Т-образные пазы 22, в которых установлены с возможностью продольного перемещения ползуны 23 и 24 захватного механизма 5, один из которых имеет правую нарезку, а второй - левую. Ползуны насажены на ходовой винт 25, установленный с возможностью вращения в корпусе кантователя от щагового двигателя 26. Ползуны 23
и 24 щарнирно связаны с башмаком 27 посредством рычагов 28, два из которых образуют параллелограмм, обеспечивающий параллельность перемещения лап относительно друг друга. На башмаке 27 смонтированы с возможностью поворота лапы 29 для захвата изделия с торца.
Приспособление для ориентации кантователя- относительно центра тяжести изделия содержит установочные щтанги 30, пропущенные в отверстиях 31 корпуса кантователя с возможностью осевого перемещения на всю длину -хода штанг. По длине штанги выполнены отверстия 32, взаимодействующие с фиксаторами 33 электромагнитов 34, установленных на корпусе кантователя.
Механизм 7, центрирующий кантователь относительно оси изделия, состоит из двух П-образных центрирующих призм 35, каждая из которых установлена в соответствующем пазу корпуса и соединена с эксцентриковым валом 36, приводимым во вращение шаговым электродвигателем 37.
Захват-кантователь работает следующим образом.
Траверсу 1 с подвескам 2, подвешенную, например, на крюк мостового крана (на чертеже не показан), подают к месту хранения кантователя. При этом рычаги 18 откинуты. После заводки подвесок 2 на цапфы И и 12 рычаги 18 поворачивают вокруг осей 19 и фиксируют щтырями 21. При этом происходит зацепление шестерни 16 привода механизма 4 поворота с зубчатым венцом 13 цапфы П кантователя. Далее включением электромагнитов 34 выводят фиксаторы 33 из йтверртий 32 установочных штанг 30 и производят подъем кантователя на величину, соответствующую расстоянию от торца очередного изделия до его центра тяжести. В этом положении фиксируют установочные щтанги фиксаторами 33. После этого краном подают кантователь к обечайке и начинают заводку кантователя на изделие. В процессе заводки ловители 10 ориентируют корпус кантователя отверстием относительно изделия. Производят опускание кантователя с таким расчетом, чтобы установочные штанги не коснулись пола цеха. В таком положении производят включение шагового электродвигателя 37 механизма 7. При этом призмы 35, перемещаясь в пазах корпуса от эксцентриковых валов 36, центрируют кантователь относительно оси изделия. После чего производят окончательный спуск кантователя до упора установочных штанг в пол. При этом происходит окончательное совмещение оси цапф 11 и 12 кантователя с центром тяжести изделия. Затем производят включение шаговых двигателей 26 захватного механизма 5, ходовые винты которого перемещают ползуны 23 и 24 навстречу друг другу. Посредством рычагов 28 происходит подъем лап 29 на величину чуть большую габаритов изделия. Лапы с помощью параллелограммного механизма в рычажной системе перемещается одна параллельно другой на всем пути перемещения их вдоль оси изделия и при зажатии изделия. После этого включением привода поворота лап производят поворот лап, а включением шаговых двигателей 26 захватного механизма 5 - зажатие изделия лапами 29. Изделие подготовлено к кантовке. Краном поднимают его на необходимую высоту и произ водят кантовку изделия включением механизма 4 поворота кантователя.
По окончании процесса кантовки освобождают установочные штанги, которые, опускаясь под собственным весом, занимают крайнее нижнее положение. Затем начинают спуск кантователя с обечайкой.
Первыми на пол цеха опускаются установочные штанги, а корпус с обечайкой продолжает опускаться до тех пор, пока обечайка не ляжет на технологические прокладки, при этом привод главной лебедки крана (не чертеже не указан) выключается. После этого проводят расфиксацню и поворот лап захватного механизма, отвод центрирующих призм 35 от изделия. Кантователь поднимается и транспортируется к месту хранения. . PatJoTofl кантователя и его механизмами управляют либо автоматически с пульта, установленного в кабине крана, либо с выносного ручного пульта управления. Формула изобретения . Захват-кантователь тяжеловесных изделий, содержащий траверсу с подвесками, на которых установлен кантующнй механизм с захватными органами и поворотным приводом, отличающийся тем, что, с целью повы1:ения надежности его работы при расшнренни диа. пазона размеров захватываемых изделий, кантующий механизм содержит корпус с центральным отверстием, по периметру которого установлены ловители в виде трехгранных призм, а в плоскости корпуса, перпендикулярно продольной оси изделия, жестко смонтированы цапфы, взаимодействующие с подвесками траверсы, при этом одна из цапф снабжена зубчатым венцом, кинематически связанным с поворотным приводом, а захватные органы выполнены в установленных на основании корпуса с возможностью возвратно-поступа 4 ;тельного движения от двух независимых приводов ползунов, кинематически связанных посредством параллелограммных рычажных систем с зажимными поворотными лапами, причем на корпусе смонтирован механизм для центрирования его относительно оси изделия и приспособление для ориентации корпуса относительно центра тяжести изделия. 2.Захват-кантователь по п. 1, отличающийся тем, что механизм для центрирования корпуса относительно оси изделия выполнен в виде двух П-образных призм, размещенных в корпусе н снабженных приводом с эксцентриковым валом. 3.Захват-кантователь по п. 2, отличающийся тем, что приспособление для ориентации корпуса относительно центра тяжести груза содержит штанги с отверстиями, смонтированные с возможностью осевого перемещения на краях корпуса, причем на корпусе установлены электромагниты с фиксаторами, взаимодействующими с отверстиями шганг. Источники информации, принятые во внимание при экспертизе: 1.Патент Франции № 2150373, кл. В 23 q 7/00, В 66 С 1/00, 1973. 2.Патент США № 2999716, кл. 294-86, 1969. 3.Авторское свидетельство СССР № 240143, кл. В 23 к 37/04,1969.
