Изобретение относится к машииострое- нию и может быть использовано в импульсных вариаторах, металлорежущих станках и т.д.
Целью изобретения является iioBbiuienHc нагрузочной способности.
На фиг. 1 схематически изображен храповой механизм; на фиг. 2 - то же, вари- ант.
Храиовой механизм свободного хода состоит из концентрично расположенных храпового колеса Ч и обоймы 2 с клиновыми выступами 3 на ее внутренней поверхности, наклонные боковые поверхности 4 которых расположены под углом к радиусу, проходящему через его верщину 5. На наклон- ных боковых поверхностях 4 равномерно но окружности расположены с возможностью перемещения по ним подвижн ;1е опоры 6. На двух соседних боковых поверхностях 7 и 8 опор 6 расположены оси 9 собачек 10, подпружиненных к зубьям храпо- вого колеса. Оси 9 собачек прижаты к опо- ра.м 6 упруги.ми элементами 1 1, расположенными между осями 9 и обой.мой 2.
Равнодействующие реакции связи без учета сил трения со стороны подвижных опор на обойму должны иметь относительно оси вращения обоймы. Это может быть достигнуто различными варианта.ми выполнения боковых поверхностей выступов и опор. Равнодействующ.че R реакций связи со стороны подвижных опор па обойму без учета сил трения направлены по нормали к соответствующи.м боковьгм поверхностя.м, имеют плечо относительно оси вращения обоймы (фиг. 1). .
Согласно фиг. 2 каждая подвижная опора 6 установлена на двух боковых новерх- ностях выступа, которые могут быть криволинейными или прямолинейными (фиг. 2) под углом друг к другу. Равнодействующие R реакций связи со стороны подвижных опор на обой.му без учета сил трения также имеют плечо относительно оси вращения обоймы.
Храповой механизм свободного хода работает следующим образом.
При вращении храпового колеса 1 по часовой стрелке одна из собачек 10 первой вступает в контакт с зубом храпового колеса. Ее ось 9 под действием силы со стороны храпового колеса раздвигает две соответствующие подвижные опоры 6. Эти подвижные оноры 6, перемещаясь в разные стороны, вызывают движение остальных собачек 10 до контакта их с зубьями храпового колеса 1. После того, как все собачки 10 войдут в зацепление с зубья.ми храпово
0
0
5 о
5 Q
5
0
го ко.леса 1. движение их относительно обоймы прекращается и происходит передача крутящего момента с храпового колеса 1 на обойму 2. В работе участвуют все собачки, так как равьгодействующие реакций связи со стороны подвижных опор на обойму имеют плечо относительно оси вращения обоймы, крутящий момент на обойму передается каждой подвижной опорой. При вращении храпового колеса I против часовой стрел ки происходит свободный ход, во время которого упругие элементы 11 возвращают оси 9 собачек 10 и подвижные опоры 6 в исходное положение.
Согласно фиг. 2 подвижные опоры со- верщают относительно обоймы плоской а- раллельное движение. При высоких скоростях заклинивания подвижные опоры перемещаются относительно обоймы с ускорением. Возникающие при это.м силы инерции оказывают значительное влияние на распределение нагрузки .между собачка.ми. И с этой точки зрения плоскопараллельное движение опор относительно обоймы .может оказаться предпочтительнее.
В предложенной конструкции храпового .механизма свободного хода крутящий момент на обойму передается каждой подвиж- пой опорой. Поэто.му нагрузка равно.мерно распределяется на все подвижные опоры, собачки и оси собачек. В результате повы- щаются нагрузочная способность, надежность и долговечность механизма.
Формула изобретения
Храповой .механизм свободного хода, содержащий концентрично расноложенные храповое колесо и обойму с клиповы.м выступом на внутренней поверхности, размещенные в ней равномерно по окружности подвижные опоры, на наклонных соседних боковых новерхностях которых расположены оси подпружиненных собачек, взаимодействующих с храповым колесом, и упругие элементы, связывающие оси собачек с обоймой, при этом боковые поверхности клинового выступа обой.мы расположены под уг- ло.м к радиусу, прохо..му через его верщину, отличающийся тем, что, с целью по- выщения нагрузочной снособности путе.м передачи крутящего момента на обойму каждой подвижной опорой, на внутренней поверхности обоймы выполнены дополнительные аналог ичные клиновые выступы, расположенные равномерно по окружности, а каждая подвижная опора размещена как ми- ниму.м на одной из наклонных боковых поверхностей клинового выступа.
Л.
R
5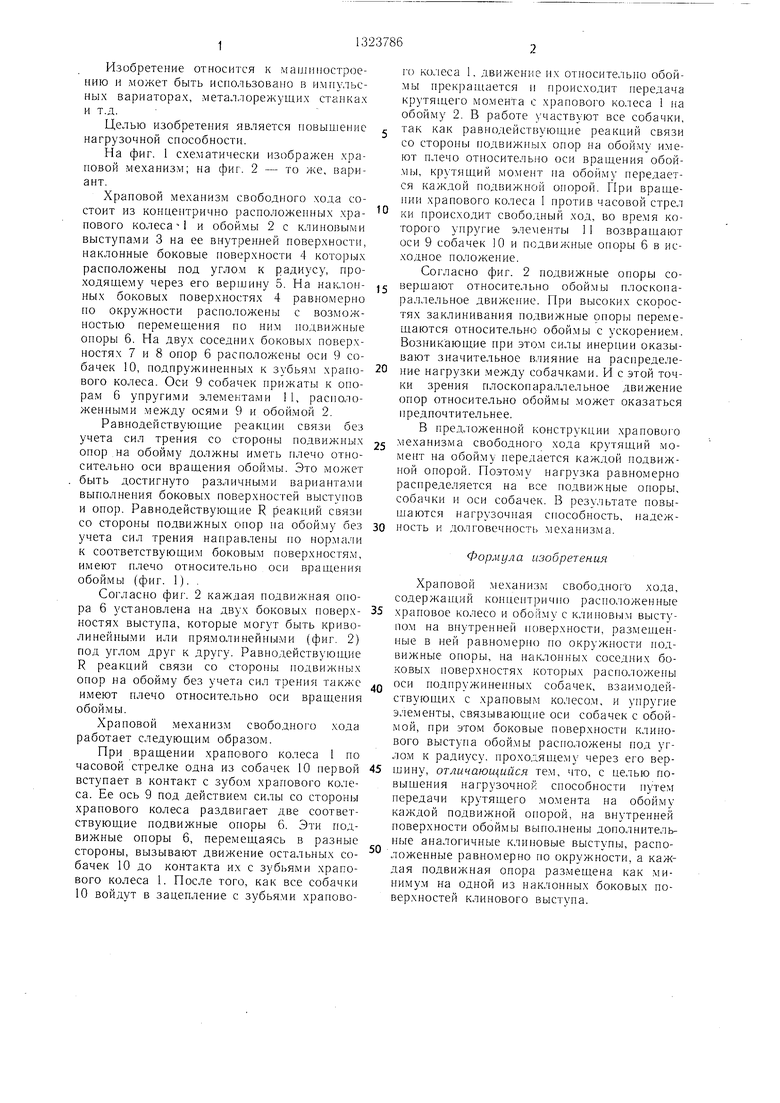
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповой механизм свободного хода | 1984 |
|
SU1214955A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Храповой механизм свободного хода | 1981 |
|
SU1027448A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2009 |
|
RU2398144C1 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| Храповой механизм свободного хода | 1983 |
|
SU1200028A1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2119601C1 |
Изобретение относится к области машиностроения. Целью изобретения является новьинение нагрузочной енособности. Хра- иовой механизм состоит из расположенных 2 ff концснтрично хранового колеса 1 и обоймы 2с выступами 3 на внутренней повер.хпости. Наклонные боковые поверхности 4 выступов 3расноложены под углом к радиусу, проходящему через его вершину 5, и на них подвижно установлены опоры 6. К двум соседним боковым повер.хностям 7 и 8 опор 6 прижаты осп 9 собачек 11. подпружиненных к храповому колесу. При враидении храпового колеса I его зубья взаимодействуют с собачками 11. которые самоустанавливаются под действием приложенных к ним усилпй и обеспечивают иередачу вра- на обойму 2. При этом каждая собачка 11 и опора 6 нагружены равномерно. 2 ил. 6 10 9 (Л 11 со ts3 оо 00 05
| Храповой механизм свободного хода | 1984 |
|
SU1214955A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
