Изобретение относится к устройствам для бесконтактного определения степени загрузки движун;егося автомобиля и может быть использо вано для определения объема или массы груза в кузове карьерного самосвала.
Целью изобретения является повышение точности работы устройства.
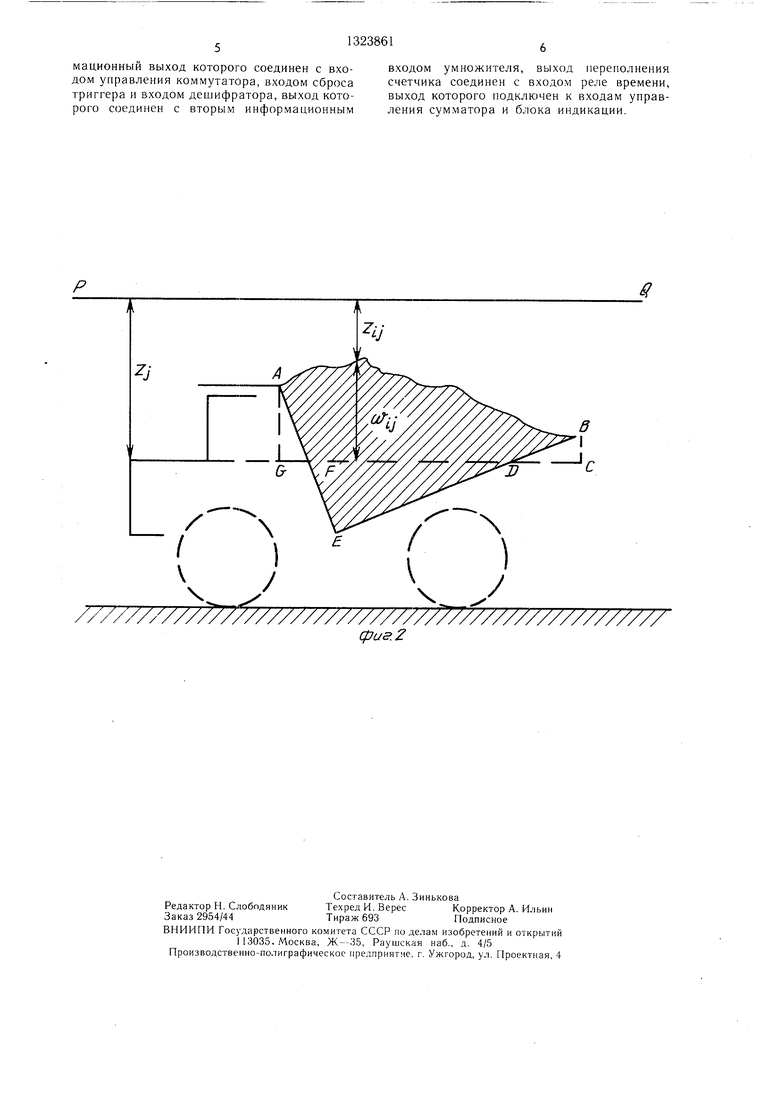
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - принцип определения объема груза с помощью устройства.
Устройство содержит дальномеры 1 продольного ряда, дальномеры 2 поперечного ряда, дешифратор 3, коммутатор. 4, пороговый элемент 5, триггер 6, счетчик 7, аналого-цифровой преобразователь 8, генератор 9 импульсов, элемент И 10, умножитель 11, сумматор 12, реле 13 времени, блок 14 индикации.
Объем груза в кузове автомобиля (фиг. 2 определяется из следующего выражения: V гр VABCG -}- VFDE - VAFG - VBCD,
где VABCG - объем пространства, ограни- ниченного поверхностью груза, плоскостью капота GC и и плоскостями, проведенными через линии контура кузова в в плане, проведенными перпендикулярно плоскости капота;
VFDE, VAFG,
VBCD - объемы, соответствующие на фиг. 2 контурам FDE, AFG и BCD.
Для каждого типа самосвала значение выражения VFDE - VAFG - VBCD является известной величиной, определяемой геометрией кузова и его положением относительно плоскости капота, и определение Vrp может быть сЕ едено к определению VABCG.
Объем VABCG может быть вычислен по формуле
- пи 41-f
VABCG T-hl 2 S (w/, + w. + -|+ WM,,+i),
где w,,-
;i)
расстояние от плоскости капота до j-ro дальномера 1 продольного ря40 двумя соседними дальномерами 1 за время достаточное для обработки показаний дальномеров 2 поперечного ряда, а их число п должно обеспечивать длину ряда, равную длине кузова автомобиля. Коммутатор 4 является аналоговым с цифровым управленида, расположенного в горизонталь- ем, причем i-й дальномер 2 поперечного ряZ,
h m
n -
ной плоскости, показано на фиг. 2 прямой PQ;
расстояние от поверхности груза до i-ro дальномера 2 поперечного ряда в J-M цикле измерений дально.меров поперечного ряда; шаг установки дальномеров поперечного ряда;
шаг установки дальномеров про дольного ряда;
число дальномеров поперечного ряда;
число дальномеров продольного ряда.
да -коммутируется при наличии на его управляющем входе кода равного К (т + 1) -4- + 1, где К О, 1,..., п - 1, а j-й дальномер 1 продольного ряда - при значеqg НИИ (J - 1) (т -|- 1). Пороговый элемент 5 настраивается таким образом, чтобы на его выходе появлялся сигнал при нахождении в зоне действия скоммутирован- ного дальномера элемента корпуса вала. Триггер 6 RS-типа с комбинационной
55 схемой на входе сброса, реагирующей на комбинации, соответствующие числам О, (п1 4- 1 ),.-, (п - 1) (т + 1). Дешифратор 3 представляет собой, например, матрицФормулак виду
) может быть преобразована
гп
hi
Zl
fhlU o- y f hl I-T/
Z,T
+ 1
-)
Ы
+ 1Г(-Ь1)г,-/ +
l-г
+J(m nlz;+ (-f)z,;-f
() г™ .) +
Zn +
()
2.1 п +
Е
(-V)
+
15 +
f hlv ,
I-f}
5
где Ш -число дальномеров поперечного ряда, укладывающихся на щирине . кузова.
0
Коэффициенты, стоящие в формуле (2)
перед ZjC 1, 2,...,п) и Z,-; (i 1, 2,..., j 1, 2,...n) являются константами и записаны в дешифратор 3.
Поперечный ряд дальномеров 2 располагается перпендикулярно к направлению движения автомобиля в горизонтальной- плоскости над полотном дороги. Шаг h установки определяется требуемой точностью определения объема груза, а их число m - шириной автомобиля с учетом его возможных
поперечных смещений. Расстояние от центра дальномеров 2 поперечного ряда до ближайшего к ним дальномера 1 продольного ряда выбирается таким, чтобы в момент попадания капота автомобиля в зону его действия дальномеры 2 поперечного ряда располагались над передней частью кузова самосвала (фиг. 2). Шаг между дальномерами 2 выбирается таким образом, чтобы при максимальной скорости движения автомобиля его передний край проходил между
0 двумя соседними дальномерами 1 за время достаточное для обработки показаний дальномеров 2 поперечного ряда, а их число п должно обеспечивать длину ряда, равную длине кузова автомобиля. Коммутатор 4 является аналоговым с цифровым управлени5
ем, причем i-й дальномер 2 поперечного ряда -коммутируется при наличии на его управляющем входе кода равного К (т + 1) -4- + 1, где К О, 1,..., п - 1, а j-й дальномер 1 продольного ряда - при значеqg НИИ (J - 1) (т -|- 1). Пороговый элемент 5 настраивается таким образом, чтобы на его выходе появлялся сигнал при нахождении в зоне действия скоммутирован- ного дальномера элемента корпуса вала. Триггер 6 RS-типа с комбинационной
55 схемой на входе сброса, реагирующей на комбинации, соответствующие числам О, (п1 4- 1 ),.-, (п - 1) (т + 1). Дешифратор 3 представляет собой, например, матрицное постоянное запоминающее устройство, ставящее в соответствие каждому двоичному значению на входе постоянное число на выходе.
Устройство работает следующим образом.
В исходном состоянии счетчик 7 сброшен в нулевое состояние и к выходам аналого-цифрового преобразователя 8 (АЦП) и порогового элемента 5 подключен первый дальномер 1 продольного ряда. В момент
ный в дешифраторе 3 с последующим прибавлением к содержимому сумматора 12. Элемент И 10 запрешает обработку значений от дальномеров, в зоне действия которых нет корпуса автомобиля. На п (ni -{- 1)-м такте, соответствующем переполнению счетчика 7, осуществляется его сброс в исходное состояние и запуск импульсом переполнения с выхода счетчика 7 реле 13 времени, которое на заданное время включает
попадания капота самосвала в зону деист- Ю работу блока 14 индикации. Задним фронтом импульса реле 13 времени выключается индикация, обнуляется сумматор 12, после чего схема готова к новому циклу определения объема груза.
ВИЯ этого дальномера срабатывает пороговый элемент 5, триггер 6 устанавливается в единичное состояние, разрешая работу генератора 9 импульсов. Передний фронт первого импульса генератора проходит через эле мент И 10 и запускает АЦП 8, а его задний фронт добавляет единицу к содержимому счетчика 7 и разрешает работу умножителя 11, перемножающего цифровое значение измеренного дальномером 1 рас15
Набор коэффициентов, реализуемых дешифратором, может определить один из методов численного интегрирования (например, метод трапеций). Во время работы устройства показания дальномеров 1 продольного
стояния на коэффициент, задаваемый дешиф- 20 ряда используются для уточнения положения ратором 3. Новое, состояние счетчика 7 определяет коммутацию первого поперечного дальномера, информация с которого обрабатывается по очередному импульсу гекорпуса самосвала на каждом цикле считывания значений поперечного ряда, чем снижается влияние вертикальных перемещений самосвала. Подключение дальномеров 2 понератора 9 аналогично описанному. Таким 25 перечного ряда после моментов попадания образом, поочередно коммутируется весь поперечный ряд дальномеров. На (т + 1)-м такте происходит коммутация второго дальномера.
Таким образом, после первого срабатывания счетчика 7 в накапливающем сумма- 30 торе 12 оказывается записано число, равное
.l
, соответствующее первому элементу
переднего края капота самосвала в зону очередного дальномера 1 обеспечивает независимость шага измерения от скорости и ускорений движения самосвалов.
Формула изобретения
Устройство для определения объема груза в кузове движущегося автомобиля, содержащее дальномеры поперечного ряда, коммутатор, дешифратор и блок индикации, отУстройство для определения объема груза в кузове движущегося автомобиля, содержащее дальномеры поперечного ряда, ком мутатор, дешифратор и блок индикации, отвыражения (2).
Новое состояние счетчика 7 определяет коммутацию первого дальномера 2 попереч- 35 личающееся тем, что, с целью повышения ного ряда. Величина zn (фиг. 2), получае- точности работы устройства, в него введе- мая на его выходе по очередному импульсу генератора 9, обрабатывается в устройстве аналогично описанному выше. Затем коммутируется второй дальномер 2 попереч- д,, ного ряда и т.д. до дальномера поперечного ряда. При этом в накапливающем сумматоре окажется записано число, соответствующее первой строке выражения (2).
ны дальномеры продольного ряда, пороговый элемент, триггер, генератор импульсов, счетчик, реле времени, элемент И, аналого-цифровой преобразователь, умножитель и сумматор, выходы дальномеров поперечного ряда соединены с первой группой информационных входов коммутатора, выходы дальномеров продольного ряда подключены к второй
группе информационных входов коммутато- Коммутация второго дальномера 1 про- д ра, выход которого соединен с входом подольного ряда и сброс триггера 6 осуществляется (т + 1)-м импульсом генератора 9. Работа устройства прекращается до появления в зоне действия второго дальномера 1 продольного ряда капота автомобиля, после чего повторится весь цикл считывания расстояний Z/2, измеренных дальномерами 2 поперечного ряда. Таким образом, в процессе прохождения капота автомобиля вдоль дальномеров 1 продольного ряда периодически происходит поочередное
рогового элемента и информационным входом аналого-цифрового преобразователя, выход которого подключен к первому информационному входу умножителя, выход которого соединен с информационным входом сум- 50 матора, выход которого подключен к информационному входу блока индикации, выход порогового элемента соединен с входом установки единицы триггера и первым входом элемента И, выход которого подключен к входам управления аналого-цифрового пресчитывание показаний с дальномеров 2 по-55 образователя и умножителя, выход триггера
перечного ряда, каждое значение умножает-соединен с входом генератора импульсов,
ся на соответствующий текущему такту (им-выход которого подключен к второму входу
пульсу генератора 9) коэффициент, записан-элемента И и к входу счетчика, инфорный в дешифраторе 3 с последующим прибавлением к содержимому сумматора 12. Элемент И 10 запрешает обработку значений от дальномеров, в зоне действия которых нет корпуса автомобиля. На п (ni -{- 1)-м такте, соответствующем переполнению счетчика 7, осуществляется его сброс в исходное состояние и запуск импульсом переполнения с выхода счетчика 7 реле 13 времени, которое на заданное время включает
работу блока 14 индикации. Задним фронтом импульса реле 13 времени выключается индикация, обнуляется сумматор 12, после чего схема готова к новому циклу определения объема груза.
15
Набор коэффициентов, реализуемых дешифратором, может определить один из методов численного интегрирования (например, метод трапеций). Во время работы устройства показания дальномеров 1 продольного
20 ряда используются для уточнения положения
ряда используются для уточнения положения
корпуса самосвала на каждом цикле считывания значений поперечного ряда, чем снижается влияние вертикальных перемещений самосвала. Подключение дальномеров 2 по перечного ряда после моментов попадания
перечного ряда после моментов попадания
переднего края капота самосвала в зону очередного дальномера 1 обеспечивает независимость шага измерения от скорости и ускорений движения самосвалов.
Формула изобретения
Устройство для определения объема груза в кузове движущегося автомобиля, содержащее дальномеры поперечного ряда, коммутатор, дешифратор и блок индикации, отличающееся тем, что, с целью повышения точности работы устройства, в него введе-
личающееся тем, что, с целью повышения точности работы устройства, в него введе-
ны дальномеры продольного ряда, пороговый элемент, триггер, генератор импульсов, счетчик, реле времени, элемент И, аналого-цифровой преобразователь, умножитель и сумматор, выходы дальномеров поперечного ряда соединены с первой группой информационных входов коммутатора, выходы дальномеров продольного ряда подключены к второй
группе информационных входов коммутато- ра, выход которого соединен с входом погруппе информационных входов коммутато- ра, выход которого соединен с входом порогового элемента и информационным входом аналого-цифрового преобразователя, выход которого подключен к первому информационному входу умножителя, выход которого соединен с информационным входом сум- матора, выход которого подключен к информационному входу блока индикации, выход порогового элемента соединен с входом установки единицы триггера и первым входом элемента И, выход которого подключен к входам управления аналого-цифрового преобразователя и умножителя, выход триггера
мационныи выход которого соединен с входом управления коммутатора, входом сброса триггера и входом дешифратора, выход которого соединен с вторым информационным
входом умножителя, выход переполнения счетчика соединен с входом реле времени, выход которого подключен к входам управления сумматора и блока индикации.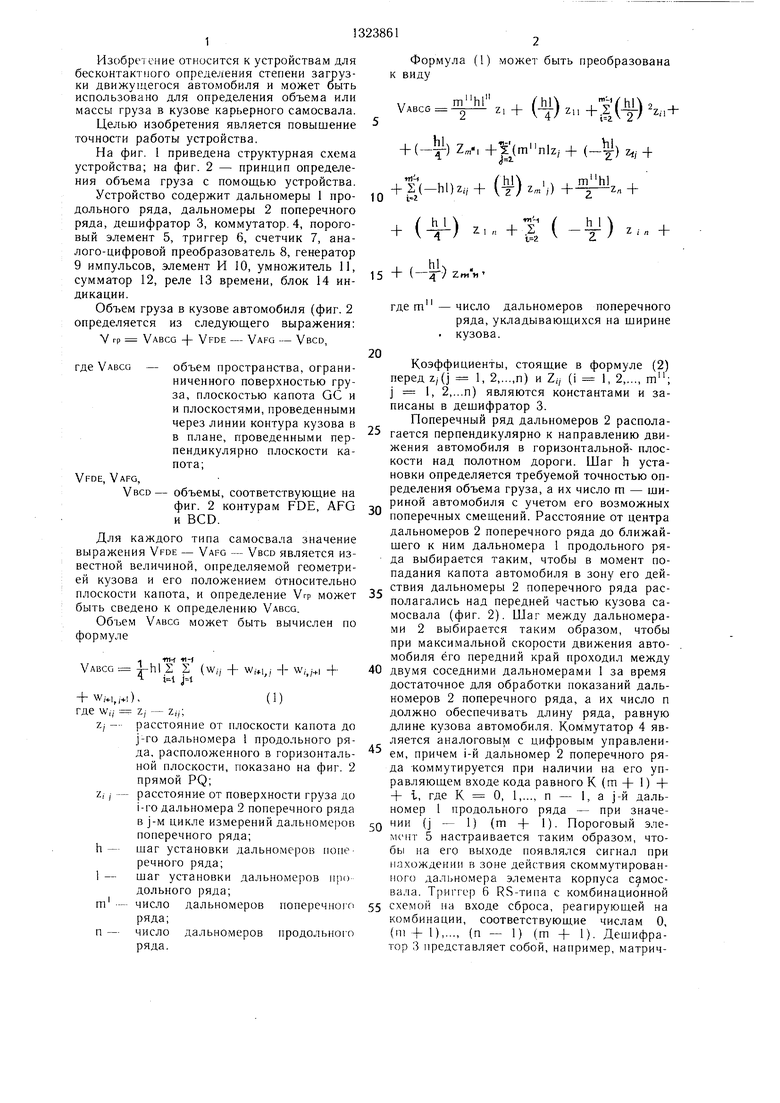
| название | год | авторы | номер документа |
|---|---|---|---|
| Телеметрическая система со сжатием информации | 1989 |
|
SU1672502A1 |
| Цифровой вольтметр среднеквадратического значения переменного напряжения | 1988 |
|
SU1652933A1 |
| Анализатор содержания кремния в жидком чугуне | 1990 |
|
SU1742691A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| Устройство для обработки данных при формировании диаграммы направленности антенной решетки | 1987 |
|
SU1462351A1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
| Устройство для диагностики неисправностей технических объектов | 1988 |
|
SU1536357A1 |
| Устройство для измерения расстояния между центрами двух изображений точечного объекта | 1990 |
|
SU1788597A1 |
| Двухотсчетный преобразователь синусно-косинусно-модулированных сигналов переменного тока в код | 1985 |
|
SU1283969A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
Изобретение относится к устройствам для бесконтактного определения степени загрузки движущегося автомобиля и может быть применено для определения объема или массы груза в кузове карьерного самосвала. Целью изобретения является повышение точности работы устройства. Определение объема груза происходит методом численного интегрирования расстояний от фиксированной плоскости до поверхности груза с помощью дальномеров 2 поперечного ряда. При попадании капота автомобиля в область действия очередного дальномера 1 продольного ряда через коммутатор 4 последовательно опрашиваются дальномеры 2. Измеренные расстояния преобразуются в преобразователе 8, умножаются в перемножителе 11 на весовые коэффициенты, поступающие с выхода дешифратора 3, и накапливаются в сумматоре 12. После окончания определения объема груза включается блок 14 индикации. 2 ил. (Л со ю со 00 О) дзс/s .l
V///////////////////777/7///7//////7//7//777
фиг. 2
| Рязанцев Г | |||
| К., Кремер О | |||
| Г., Хайда- ров К | |||
| А | |||
| Автоматизация контроля работы нерельсового рудничного транспорта | |||
| Алма-Ата: Наука, 1982, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Там же, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
