132
ностью контролировать и регулировать их движение в плоскости пласта в условиях постоянно меняющегося взаимного положения секций базы комплекса. Дпя этого вдоль траектории движения комбайна формируют электромагнитное поле. С заданной дискретностью определяют и фиксируют местоположение комбайна. Для каждого фиксированного положения комбайна измеряют величину напряженности в трех точках, расположенных на одной прямой, с шагом, равным половине корпуса комбайна.Величину напряженности в средней точке сравнивают с величинами напряженности в двух крайних точках. По результатам сравнения определяют смещение секции базы, соответствующей средней точке. Величины смещений сек1
Изобретение относится к автоматизации .очистных комплексов, а именно к способам и устройствам автоматического контроля и регулирования их движением в плоскости пласта.
Цель изобретения - повьппение точности и надежности контроля и регулирования в условиях постоянно меняющегося взаимного положения секций базы горнодобывающего комплекса.
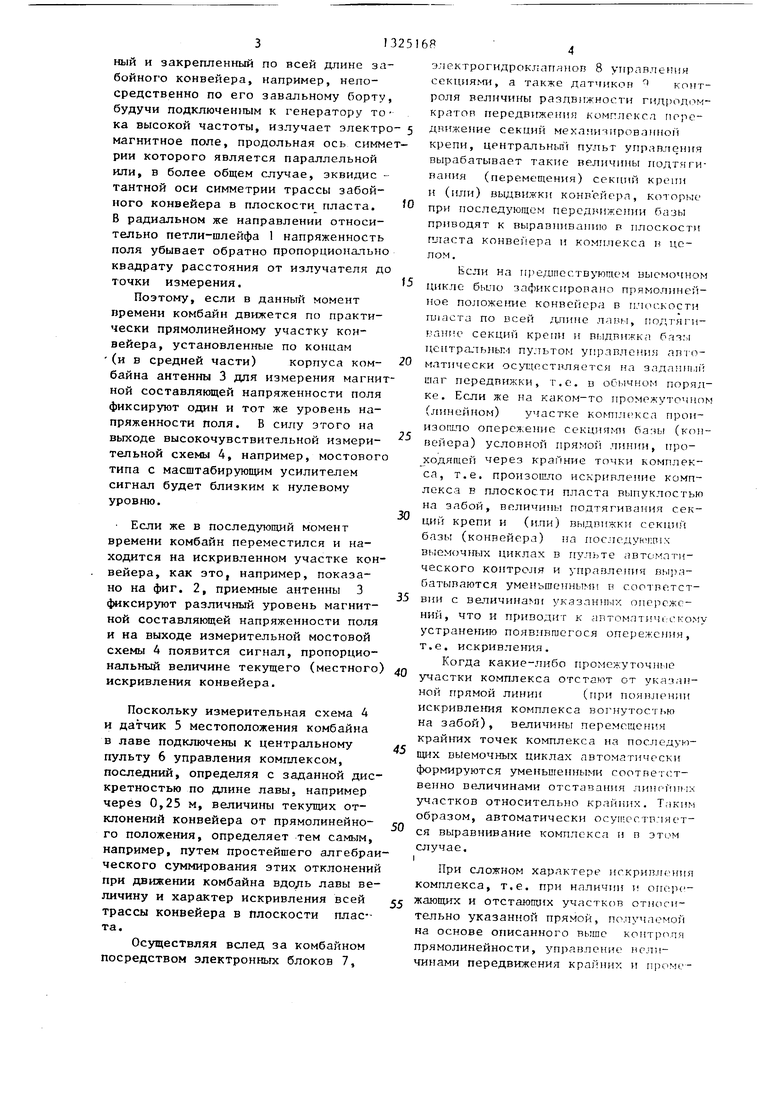
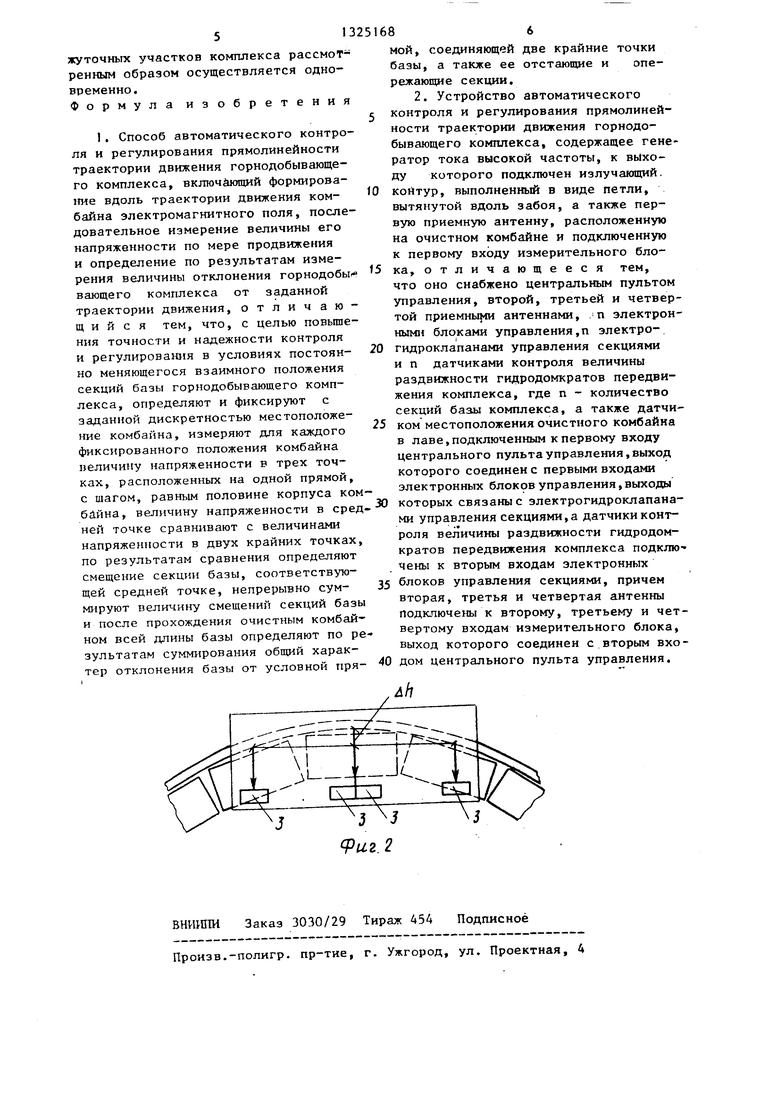
На фиг. 1 показан механизированный очистной комплекс с устагювлен ным на нем устройством автоматичес-, кого контроля и управления в плоскости пласта, вид в плане; на фиг. 2 - схематическое изображение взаимного смещения секций базы (рештаков конч вейера) в плоскости пласта и величина текущего (местного) возможного искривления комплекса 3 h в плоскости пласта, контролируемого в данный момент движущимся вдоль лавы комбайном.
Устройство для автоматического контроля и управления очистным механизированным комплексом в плоскости пласта включает излучающий контур 1, выполненный в виде петли-шлейфа, закрепленной неподвижно по всей длине комплекса, например, вдоль
8
НИИ базы непрерывно суммируют. После прохождения комбайном всей длины f базы определяют по результатам суммирования общий характер отклонения базы от условной прямой, соединяющей две крайние точки базы, а также ее Отстающие и опережающие секции.Уст- во для осуществления способа включает излучающий контур 1, подключенный к генератору 2 тока высокой частоты, три антенны 3, подключенные- к измерительному блоку 4, датчик 5 местоположения комбайна и пульт 6 управления. На секциях крепи .установлены электронные блоки 7 управления, электро- гидроклапаны 8 управления и датчики 9 контроля величины раздвижности гидродомкратов передвижки комплекса. 2 с.п. ф-лы, 2 ил.
fO
завального борта конвейера, и подключенный к генератору 2 тока высокой частоты. На концах и в средней части корпуса комбайна установлены
5 антенны 3 для измерения магнитной составляющей напряженности поля, которые подключены к высокочувствительной измерительной схеме 4, например, мостового типа с масштабирующим усилителем, выход которой подключен вместе с датчиком 5 местоположения комбайна в лаве к центральному пульту 6 управления комплексом.
На секциях крепи установлены электронные блоки 7 управления, электрогидроклапаны 8 управления секциями и датчики 9 контроля величины раздвижности гидродомкратов передвижения комплекса, соединенные между собой и с центральным управления соответствуюпЙ1Ми кабельными линиями связи.
- Способ автоматического контроля и управления очистным механизированным комплексом в плоскости пласта ос ществляется предлагаемым устройством следующим образом.
Замкнутый в виде петли-шлейфа изл
t5
20
30
чающий контур 1, неподвижно уложен.-
ный и закрепленный по всей длине забойного конвейера, например, непосредственно по его завальному борту, будучи подключенным к генератору тока высокой частоты, излучает электро магнитное поле, продольная ось симмерии которого является параллельной или, в более общем случае, эквидис - тантной оси симметрии трассы забойного конвейера в плоскости пласта. В радиальном же направлении относительно петли-шлейфа 1 напряженность поля убывает обратно пропорционально квадрату расстояния от излучателя до точки измерения.
Поэтому, если в данньш момент времени комбайн движется по практически прямолинейному участку конвейера, установленные по концам (и в средней части) корпуса ком- байна антенны 3 для измерения магнитной составляющей напряженности поля фиксируют один и тот же уровень напряженности поля. В силу этого на выходе высокочувствительной измерительной схемы 4, например, мостового типа с масштабирующим усилителем сигнал будет близким к нулевому
уровню.
Если же в последующий момент времени комбайн переместился и находится на искривленном участке конвейера, как это, например, показано на фиг. 2, приемные антенны 3 фиксируют различный уровень магнитной составляющей напряженности поля и на выходе измерительной мостовой схемы 4 появится сигнал, пропорциональный величине текущего (местного) искривления конвейера.
Поскольку измерительная схема 4 и датчик 5 местоположения комбайна в лаве подключены к центральному пульту 6 управления комплексом, последний, определяя с заданной дискретностью по длине лавы, например через 0,25 м, величины текущих отклонений конвейера от прямолинейно- го положения, определяет тем самым, например, путем простейшего алгебраического суммирования этих отклонений при движении комбайна вдоль лавы величину и характер искривления всей трассы конвейера в плоскости плас-- та.
Осуществляя вслед за комбайном посредством электронных блоков 7,
25
- 5 т О -5
20
30
Q
г Q
электрогидроклапанов 8 угтрлвления секциями, а также датчикон контроля величины раздвижносг гидродом- кратор передвижения комплекса пере- днижение секций мехаяичироваиноГт крепи, центральньп г пульт управления вырабатывает такие величины подтягивания (перемещения) секций крепи и (или) выдвижки конвейера, которые при последующем переднижс1П1И базы приводят к выравниванию в плоскости пласта KOHBefiepa и комплекса в целом.
Если на предшествующем выемочном цикле бьию зафиксировано прямолинейное положе1ше конвейера в плоскости ruiacra по всей длине лавм, 1 од7-яги- F. anne секций крепи и выдвижка баты центра- тьным пу:тьтом управления автоматически осутдеетвляетси на шаг передвижки, т.е. в обычном порядке. Если же на каком-то iipoMeAyTOMHoh (линейном) участке комплекса прои- иэогало опережение секцияг-п) базы (конвейера) условной прямой линии, проходящей через крайние точки комплекса, т.е. произотпло искривление комплекса в плоскости пласта выпуклостью на забой, величины подтягивания секций крепи и (или) выдвижки секций базы (конвейера) на последун ;п1Х выемочт 1х циклах в пульте автомпти- ческого контроля и управления вы),ч- батываются уменьшенными в соответствии с вeличинa п указанных опережений, что и приводит к автоматическому устранению появившегося опережения, т.е. искривления.
Когда какие-. промежуточные участки комплекса отстают от укапанной прямой линии (при поя} лен1П1 искривления комплекса вогнутост 1Ю на забой), величины перемещения крайних точек комплекса на последую- 1ЦИХ выемочных циклах автоматически формируются умег ьшепными соответственно величинами отставания линейных участков относительно крайних. Таким образом, автоматически осутествляет- ся выравнивание комплекса и в этом
случае. I
При сложном характере искривления
комплекса, т.е. при наличии и опережающих и отстающих участков относительно указанной прямой, получаемой на основе описанного выше контроля прямолинейности, управление величинами передвижения крайних и ггромежуточных участков комплекса рассмотренным образом осуществляется одновременно. Формула изобретения
1. Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса, включйилдий формирование вдоль траектории движения комбайна электромагнитного поля, последовательное измерение величины его напряженности по мере продвижения и определение по результатам измерения величины отклонения горнодобы вамщего комплекса от заданной траектории движения, отличающийся тем, что, с целью повыше
ния точности и надежности контроля и регулирования в условиях постоянно меняющегося взаимного положения секций базы горнодобывающего комплекса, определяют и фиксируют с заданной дискретностью местоположение комбайна, измеряют для каждого фиксированного положения комбайна величину напряженности в трех точках, расположенных на одной прямой, с шагом, равным половине корпуса комбайна, величину напряженности в средней точке сравнивают с величинами напряженности в двух крайних точках, по результатам сравнения определяют смещение секции базы, соответствующей средней точке, непрерывно суммируют величину смещений секций базы и после прохождения очистным комбайном всей длины базы определяют по ре2. Устройство автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса, содержащее генератор тока высокой частоты, к выходу которого подключен излучающий, койтур, выполненный в виде петли, вытянутой вдоль забоя, а также первую приемную антенну, расположенную на очистном комбайне и подключенную к первому входу измерительного блока, отличающееся тем, что оно снабжено центральным пультом управления, второй, третьей и четвертой приемны|4и антеннами, п электронными блоками управления,п электро- гидроклапанами управления секциями и п датчиками контроля величины раздвижности гидродомкратов передвижения комплекса, где п - количество секций базы комплекса, а также датчиком местоположения очистного комбайна в лаве,подключенным к первому входу центрального пульта управления, выход которого соединен с первыми входами электронных блоков управления, выходы которых связаны с электрогидроклапана- ми управления секциями, а датчики контроля величины раздвижности гидродомкратов передвижения комплекса подклю- . Чены к вторым входам электронных 35 блоков управления секциями, причем вторая, третья и четвертая антенны подключены к второму, третьему и четвертому входам измерительного блока.
20
25
30
зультатам суммирования общий харак- выход которого соединен с.вторым вхо- тер отклонения базы от условной пря- 40 дом центрального пульта управления.
10
251686
мой, соединяющей две крайние точки базы, а также ее отстающие и опережающие секции,
2. Устройство автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса, содержащее генератор тока высокой частоты, к выходу которого подключен излучающий, койтур, выполненный в виде петли, вытянутой вдоль забоя, а также первую приемную антенну, расположенную на очистном комбайне и подключенную к первому входу измерительного блока, отличающееся тем, что оно снабжено центральным пультом управления, второй, третьей и четвертой приемны|4и антеннами, п электронными блоками управления,п электро- гидроклапанами управления секциями и п датчиками контроля величины раздвижности гидродомкратов передвижения комплекса, где п - количество секций базы комплекса, а также датчиком местоположения очистного комбайна в лаве,подключенным к первому входу центрального пульта управления, выход которого соединен с первыми входами электронных блоков управления, выходы которых связаны с электрогидроклапана- ми управления секциями, а датчики контроля величины раздвижности гидродомкратов передвижения комплекса подклю- . Чены к вторым входам электронных 35 блоков управления секциями, причем вторая, третья и четвертая антенны подключены к второму, третьему и четвертому входам измерительного блока.
20
25
30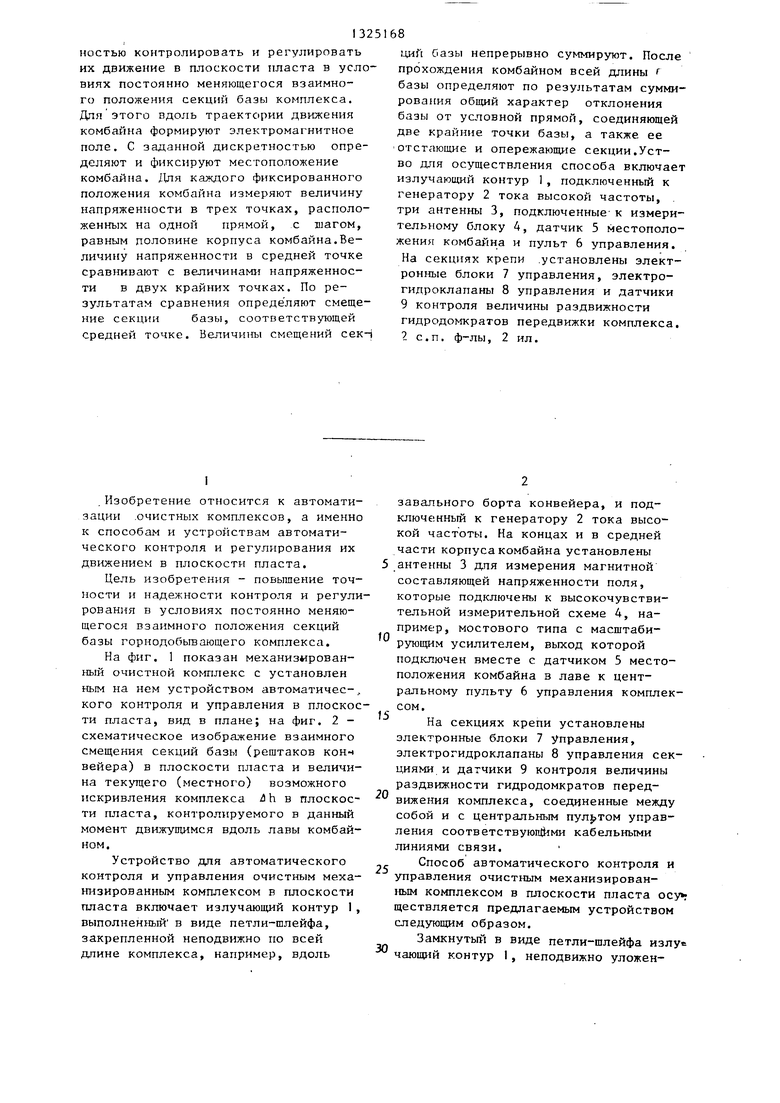
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ НИШ В ДЛИННЫХ КОМПЛЕКСНО-МЕХАНИЗИРОВАННЫХ ОЧИСТНЫХ ЗАБОЯХ | 2011 |
|
RU2472937C1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Очистной комплекс совмещенной выемки | 1988 |
|
SU1656135A1 |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Очистной механизированный комплекс | 1989 |
|
SU1696723A1 |
Изобретение относится к автоматизации горнодобывающих комплексов и позволяет с высокой точностью и надеж СО ГС СП а оо СЗ Фиг1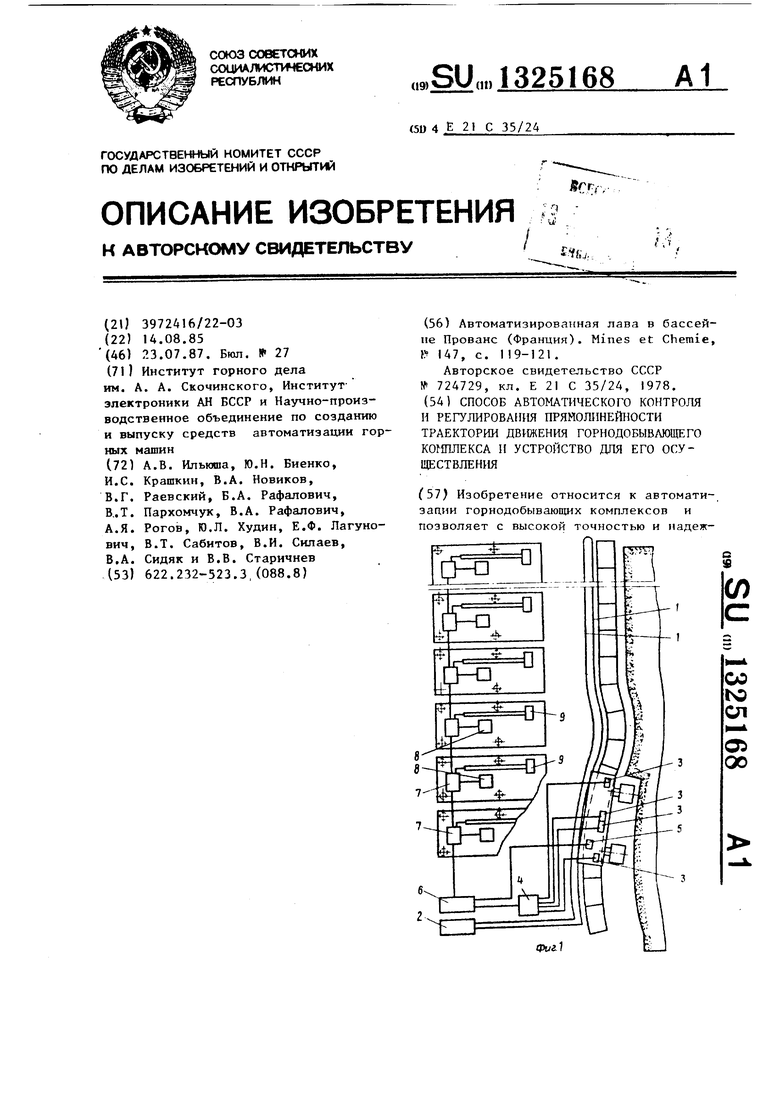
Г
ВНИИПИ Заказ 3030/29 Тнраж 454 Подписное Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| Автоматизированная лава в бассейне Прованс (Франция) | |||
| Mines et Chemie, Р 147, с | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Устройство для автоматического управления движением горной самоходной машины | 1978 |
|
SU724729A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
