Изобретение относится к радиоастрономии и может быть использовано, при управлении радиотелескопами.
Цель изобретения - повышение точности привода.
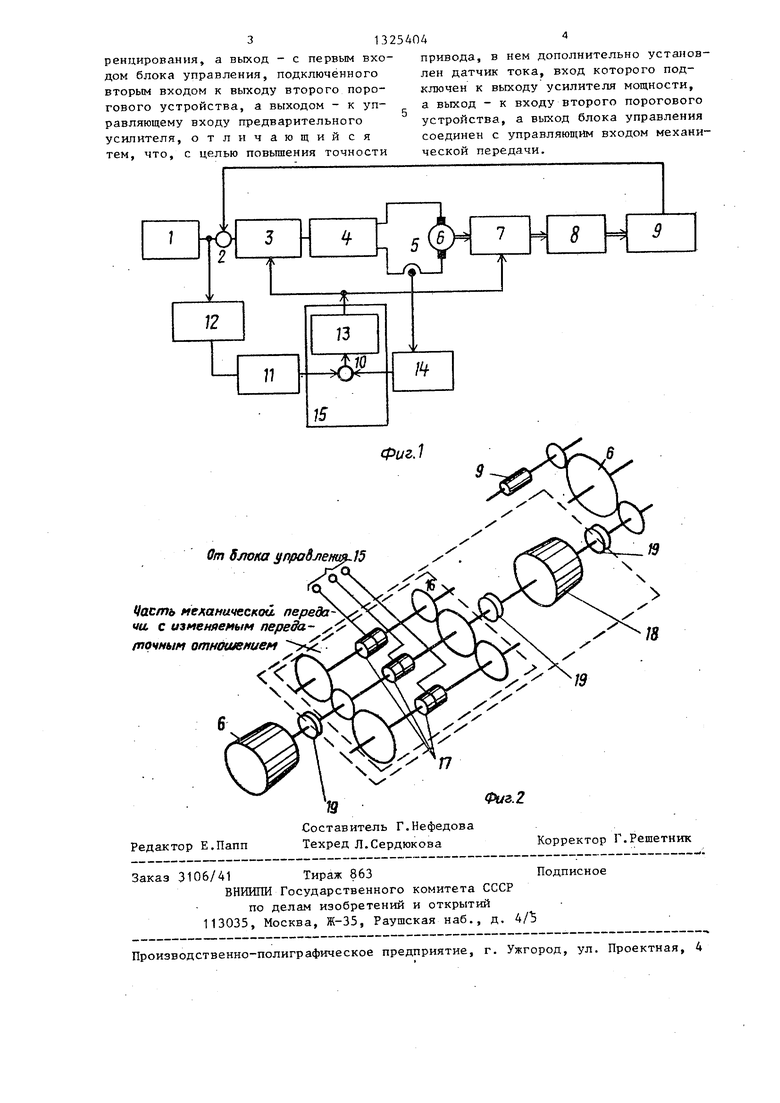
На фиг.1 Приведена функциональная схема привода; на фиг., 2 - кинематическая Схема механической передачи.
Следящий привод содержит задатчик 1, измеритель 2 рассогласования, предварительный усилитель 3, усилитель 4 мощности, датчик 5 тока, исполнительный двигатель 6, механическую передачу 7, объект 8 регулирования, датчик 9 регулируемой координа- ты сумматор 10, первое пороговое устройство 11, блок 12 дифференцирования, трехпозиционное реле 13 второе пороговое устройство 14, блок 15 управления, часть 16 механической передачи с измененньсм передаточным отношением, управляемую соединительную муфту 17, часть 18 механической передачи с постоянным передаточным отношением, неуправляемую соединительную муфту 19.
Привод работает следующим образом.
Широкий диапазон регулирования требует применения механической передачи 7 с большим передаточным отноше- ниеМу что отрицательно сказывается на плавности двшкения объекта 8 регулирования на малых скоростях вследствие влияния нелинейностей типа зоны нечувствительности, сухого трения, эффекта прерывистых токов., влияния зубцов механической передачи 7 и др. Вместе с тем малые скорости регулирования являются основным режимом работы радиотелескопов, предназначенных для связи с удаленными искусственными и наблюдения за естественньп-1и космическими объектами.
При отработке малых заданий по скорости и при малых ветровых воздействиях на выходах первого и второго пороговых устройств 11 и 14 сигналы отсутствуют. При нулевом сигнале на входе трехпозиционное реле 13 включает ту управляемую соединенительную муфту 17, которая соединяет кинематическую цепь части 16 механической передачи с измененным (наименьш1 Гм) передаточным отношением. При этом исполнительный двигатель 6, являющийся исполнительным элементом следящей , должен вращаться с увеличен- ой скоростью. Благодаря этому у ень0
5
0
5
0
шается влияние прерывистых токов, движения зубцов механической передачи 7 и таким образом решается поставленная цель - повышение точности следящего привода.
Если на выходе одного из пороговых устройств 11 (или 14) появляется ненулевой сигнал, это повлечет за собой срабатьшание трехпоэиционного реле 13 и включение второй управляемой соединительной муфты 17, соединяющей кинематическую цепь части 16 механической передачи с увеличенным передаточным отношением. Если на выходе обоих пороговых устройств 11 и 14 появляются ненулевые сигналы, что соответствует условиям работы при существенном ветровом воздействии и с отработкой значительной скорости задания, происходит включение третьей управляемой соединительной муфты 17 соединяющей кинематическую цепь части 16 механической передачи с максимальным передаточным отношением.
Привод работает в обратном порядке при уменьшении ветрового воздействия и (или) задания на отработку скорости. При любых переключениях передаточного отношения механической передачи 7 синхронно перенастраивается коэффициент передачи предварительного усилителя 3, благодаря чему настройка следящего пршюда остается неизменной. С помощью соответствующих корректирующих звеньев в предварительном усилителе могут быть реализованы любые коэффициенты передачи, необходимые для воспроизведения выбранных за- jKOHoB регулирования.
Формула изобретения
Следящий привод, содержащий задат- чик, соединенный выходом с входом
блока дисэференцирования и первым входом измерителя рассогласования, под- ключенног о вторым входом к выходу датчика регулируемой координаты, а выходом - к информационному входу предварительного усТ Шителя, соединенного выходом через усилитель мощности с исполнительным двигателем, вал ко- тораго через меканш-шскую передачу связан с входом объекта регулирования j выход которого связан с входом датчика регулируемой координаты, первое пороговое устройство, вход которого соединен с выходом блока диффе
ренцирования, а выход - с первым входом блока управления, подключенного вторым входом к выходу второго порогового устройства, а выходом - к управляющему входу предварительного усилителя, отличающийся тем, что, с целью повышения точности
5404-
привода, в нем дополнительно установлен датчик тока, вход которого подключен к выходу усилителя мощности, а выход - к входу второго порогового устройства, а выход блока управления соединен с управляющим входом механической передачи.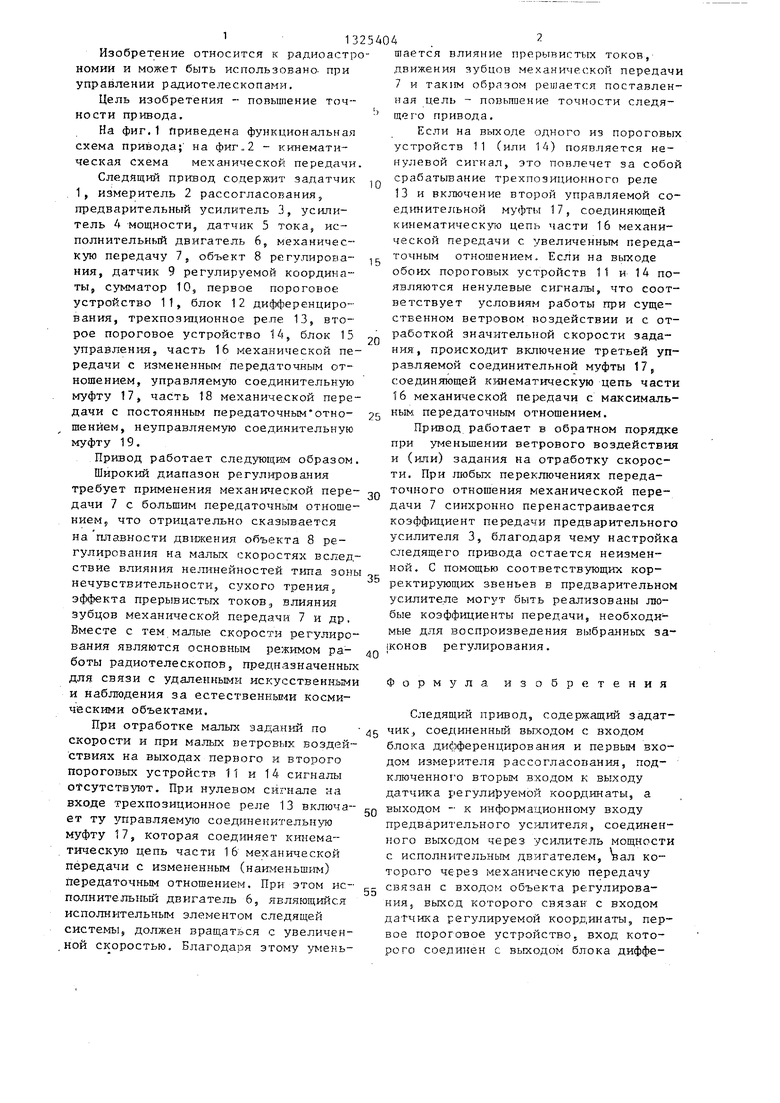
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1986 |
|
SU1312522A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Устройство для компенсации люфта | 1979 |
|
SU847309A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| Стенд для испытания механических передач | 1983 |
|
SU1153251A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2072545C1 |
Изобретение относится к радиоастрономии и может быть использовано при управлении радиотелескопами.Целью; изобретения является повышение точности привода. Она достигается за счет использования механической передачи с изменяемым передаточным отношением, которое меняется,в зависимости от скорости изменения задакяце- , го воздействия и от величины возмущающего воздействия. Возмущающее воздействие определяется косвенным путем- путем измерения тока исполнительного электродвигателя. Одновременно с изг менением передаточного отношения механической передачи изменяется коэф фициент передачи предварительного усилителя следящего привода. 2 ил.
От блока апро8легш 15
Часть механической, переда чи, с изменяемым переда- точным отношением
X,
Фиг.1
/5
Ю
П
Фиг.2
Редактор Е.Папп
Составитель Г.Нефедова Техред Л.Сердюкова
Заказ 3106/41 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4Л
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Г.Решетник
| Авторское сввдетельство СССР № 758068, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий привод | 1980 |
|
SU881667A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
