Изобретение относится к адаптинным системам управления и мелеет быть р-с- пользовано при создании систем управления станков.
Цель изобретения -- расширение функциональных возможностей.
На чертеже представлена функциональная схема устройства.
Устройство имеет регулятор 1 подач, блок 2 коммутации, первьш задат- чик 3 скорости подач, первый привод 4 подач,, систему СПИД 5, второй задат- чик 6 скорости подач, второй привод 7 подач, датчик 8 колебанМ, блок 9 ограничения вибрал ий, первый 10 и второй 11 элементы сравнения, усилитель 12 с переменным коэффициентом усиления, датчик- 13 мощности резаргия, усилитель 1А, третий элемент 15 сран- нения,.датчик 16 дисперсии случайной помехи, блок 17 адаптац.ш, задатчик
18мощности резания, датчик 19 ско-- рости изменения входного воздействия.
Устройство работает следующим образом.
При изменении заданной мощности резания (входное воздействие) сигнал эадатчика 18 мощности реэааия сравнивается во втором элементе 11 сравнения с сигналом усилителя 14 сигнала датчика 13 мощности резания. Сигнал ошибки поступает на второй вход третьего элемента 15 сравнення, на пер- вьй вход которого поступает сигнал с выхода первого элемента 10 сравнения. На первый вход первого элемента 10 сравнения поступает .сигнал от датчика 8 колебаний непосредственно, а на второй вход - через блок 9 огра- ничения вибраций. Если уровень колебаний больше допустимого, то с выхода первого элемента 10 сравнен;ия пает сигнал, огра.н1тчи15ающий сигнал шибки и тем самьп- ограничшзающий скорости подач.
Параллельно сигнал от здцатчика 18 ощности резания поступает на датчик:
19скорости изменения )зходного возействия, а сигнал с выхода второго лемента 11 сравнения - на датчик 16
исперсии случайной помехи. Сигналь: атчиков 16 и 19 поступают на блок 17 адаптации, в. котором вырабатываетя сигнал управления, устанавливаю- 1Ш в усилителе 12 оптимальный коэфициент усиления,
Сигнал ошибки с выхода третьего лемента 15 сравнения усиливается
5
0
5
0
5
0
Ej
5
усилите.чем 12 и поступает в регулятор 1 подачJ, который через блок 2 коммутации управляет приводами 4 и 7, используя сигналы задатчиков 3 и 6 скорост и подач. Приводы 4 и 7 подач воздействуют на систему СПИД 5, Состояние cHcret-a } СПИД конт-ролируется датчика1 1 и 8 и 13, замыкающими обратные связи системы стабилизации мощности резан и я.
Технико-экономическая эффективность изобретения заключается в рас- ши:рении функдионапьньгх возможностей устройства и стабилизации качества ди чамическш : и статических показателей в расширенном диапазоне изменения параметров случайной помехи и входного воздействия.
Формула изобретения
Устройство для адаптивного управ- .пения двухкоординатным станком, содержащее регулятор подач,, выход ко- торого с;оедичен с входом блока коммутации, подключенного первьм и вторым выходами и первым входам соответственно первого и второго приводов подач, вторые входы которых соединены с выходами соответственно первого и второго задатчиков скорости подач, а выходы - соответственно с первым и вторым входами системы СТМЛ, подключенной первым и вт(5рым выходами к входам соответственно датчика колеба- нж и датчика моп;ности резания, выход датчика колебаний соединен соответственно с первым входом первого элемента сравнения и через блок ограничения вибрации с вторым его входом, о т л и ч а ю щ е Е с я тем, что, с целью расшир-ения функциональных возможностейз введе.ны задатчик мощности резания, второй и третий элементы cpaBHeHi M, датчик дисперсии случайной помехи, датчик скорости изменения вход,ого воздействия, усилитель с переменным коэффициентом усиления, блок адаптг ции и усилитель, подключенньц входом к выходу датчика мощности резания, г, выходом - к первому входу второго элемента J;paBHe- ния, второй вход которого соединен с выходом задатчика мощности резания и через датчик ::корости изменения входного воздействия с первым входом блоке, адаптации,, а выход через датчик дисперсии случайной помехи - с вторым
31325406
входом блока адаптации, выход которо-му входу третьего элемента,сравнего подключен к управляющему входуния, второй вход которого подсоединен
усилителя с переменным коэффициентомj выходу второго элемента сравнения,
усиления, соединенного выходом с вхо-а выход - к информационному входу
дом регулятора подач, выход первогоусилителя с переменным коэффициентом
элемента сравнения подключен к перво-усиления.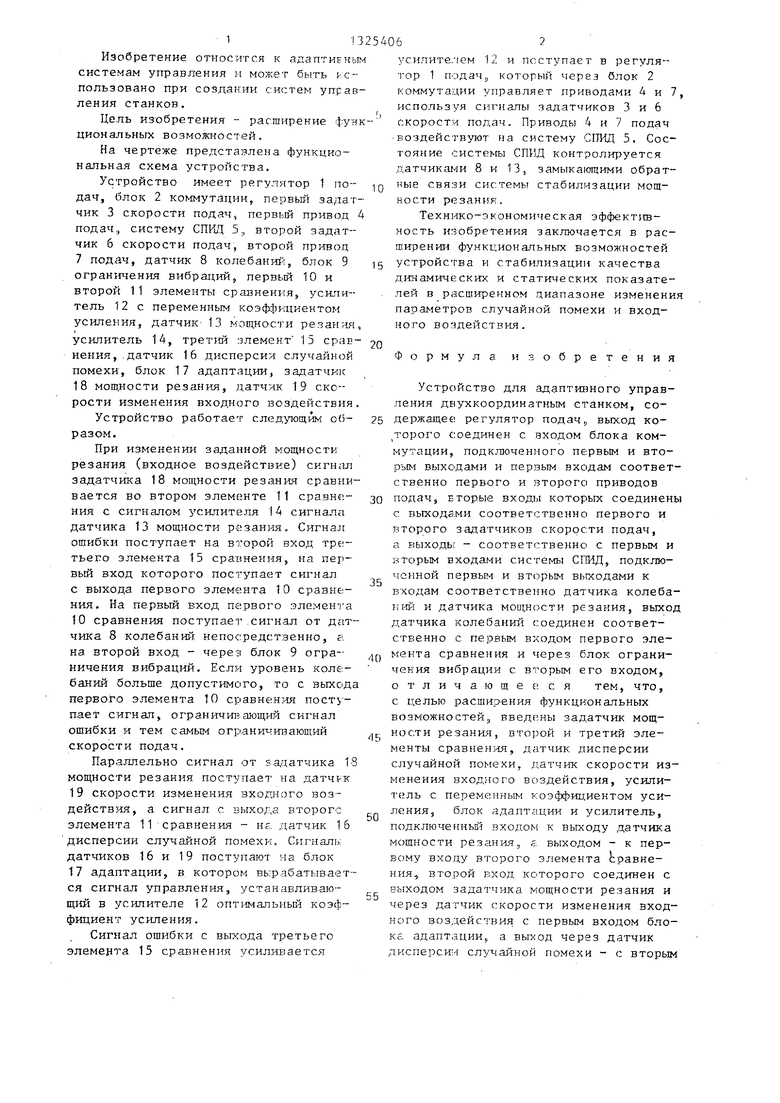
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного управления двухкоординатным станком | 1989 |
|
SU1649503A2 |
| Устройство для адаптивного управления двухкоординатным станком | 1982 |
|
SU1065824A1 |
| Устройство программного управления металлорежущими станками | 1984 |
|
SU1165671A1 |
| Устройство для адаптивного управления | 1985 |
|
SU1343390A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНОЙ ПОДАЧЕЙ ТОКАРНОГО СТАНКА | 1971 |
|
SU419847A1 |
Изобретение относится к адаптивным системам управления и может быть использовано при создании систем управления станками. Цель изобретения - расширение функциональных возможностей. Устройство для адаптивного управления двухкоординатным станком содержит регулятор 1 подач, блок 2 коммутации, первый задатчик 3 с-корости гз подачи, первьй привод 4 подач, систему СПИД 5, второй задатчик 6 скорости подач, второй привод 7 подач, датчик 8 колебаний, блок 9 ограничения вибраций, первый 10 и второй 11 элементы сравнения, усилитель 12 с переменным коэффициентом усиления, датчик 13 мощности резания, усилитель 14, третий элемент сравнения 15, датчик 16 дисперсии случайной помехи, блок 17 адаптации, задатчик 18 мощности резания и датчик 19 скорости изменения входного воздействия. Цель изобретения достигается за счет введения элементов 11, 15, усилителей 12, 14, датчиков 16, 19, блока 17 и задатчи- ка 18, что позволяет устанавливать оптимальный при данной скорости изменения входного воздействия и дисперсии случайной помехи коэффициент усиления разомкнутой системы. 1 ил. Q S Ю 11 1 17 J JZ со ISD ел 4 О О) J5
| Устройство для адаптивного управления двухкоординатным станком | 1982 |
|
SU1065824A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
