Изобретение относится к автоматическому управлению и регулированию, в частности к адаптивному управлению металлорежущими станками.
Известны устройства для стабилизации мощности резания с ограничением вибраций несущей системы станка l .
Недостатком известного устройства является то, что обработка с системой адаптивного управления по разМетке при помощи одновременного движения от двух приводов подачи возможна лишь только под углом 45°, что снижает функциональные возможности устройства.. Кроме того, отсутствует автоподстройка общего коэффициента усиления. При резании коэффициент передачи процесса резания изменяется в широких пределах, вследствие чего изменяются показатели динамического .статического качества системы регули рования.
Наиболее близким к предлагаемому являезгся устройство для адаптивного управления станками, содержащее регу1лятор1даодач, блок коммутации, последоват зпьно соединенные датчик колебаний, й-лок ограничения вибраций, задатчик(МОЩНОСТИ резания, первый элемент ойавнения, подключенный вторым входом- к- второму выходу блока ограничения вибраций, последовательно соединенные,,датчик мощности резания, ycилитeль,и второй элемент сравнения подключенный вторым входом к выходу первого элемента сравнения и к второму входу блока ограничения вибраций, последовательно соединенные первый 3адатчик скорости подач и первый привод подач, ц последовательно, соединенные второй..задатчик скорости :) подач И второй привод подач, подключанный выходом к рервому входу системы СПИД, соединенной вторым входом с выходом первого привода подач, первьсм выходом .-. с входом датч:ика МОЩНОСТИ резания, а вторым выходом с выходом датчика колебаний 2J ,
Недостатками указанного устройства являются отсутствие автоподстройки общего коэффициента усиления, неточное преобразование сигнала вибрации, снижение функциональных возможностей устройства.
Цель изобретения - повышение точ(Ности работы устройства и расширение области его применения.
Указанная цель достигается тем, что устройство для адаптивного управления двухкоординатным станком: содержит Ключ, первый квгщратор i последовательно соединенные второй квадратор, сумматор, блок извлечения квадратного корня и блок умножения, подключенный вторым входом к выходу второго элемента сравнения и входу ключа,подключенного управ.ляющим входом к выходу второго элемента сравнения и входу ключа, соединенного управляющим входом с выходом усилителя, а выходом - с выходом блока умножения и с входом регулятора подач, подключенного первым и вторым выходами соответственно к первому и второму входам блока коммутации, подключенного первым выходом к входу первого задатчика скорости подач, а вторым выходом - к входу второго квадратора, выход первого задатчика скорости подач под ключен через первый квадратор к второму входу сумматора.
На чертеже приведена функциональная схема предлагаемого устройства.
Устройство содержит регулятор 1 подачи, блок 2 коммутации, датчик 3 колебаний, блок 4 ограничения вибраций, задатчик 5 мощности, первыйэлемент 6 сравнения, датчик 7 мощности резания, усилитель 8, второй элемент 9 сравнения, задатчики 10 и 11 скоростей подачи и приводы 12 и 13 подачи, система Х:ПИД 14, ключ 15 квадраторы 16 и 17, сумматор 18, блок 19 извлечения квадратного корня, блок 20 умножения.
Па чертеже приняты обозначения: Оо - опорное напряжение контура стабилизации мощности;U t - сигнал обратной связи, задающие напряжения приводов подач; 5, минутные подачи, hf - мощность резания/ А - амплитуда вибраций, К, К 7, К(о, KI , К, - коэффициенты перед; чи соответствующих блоков, номера которых совпадают с соответствующими индексами.
Устройство работает следующим образом.
При включении устройства сигнал задания опорного напряжения UQ , задатчика Б мощности через ключ 15 открывает регулятор 1, подачи до насыщения. При включенном через блок 2-когдмутации каком-либо приводе подачи (или двух одновременно) напряжение подается на задатчик 10 или 12 скорости подачи, с выхода которого на соответствующий квадратор 16 или 17, сумматор 18, блок 19 извлечения квадратного корня и блок 20 умножения, в котором устанавливается коэффициент, пропорциональный положению движка соответствующего задатчика скорости подачи (или среднему геометрическому от положений движков пр включении двух приводов одновременно) ...
При врезании появляется сигнал обратной связи Ь , выключается ключ 15 и в работу вступает блок 20 умножения. Регулятор 1 уменьшает свое йапряжение, при этом уменьшается соответствующее за,цающее напряжение Us и подача S соответствукяцего привода подачи, при одновременной работе двух приводов уменьшается величина результирунидего вектора подачи, равного . Мощность резания стабилизируется на уровне, заданном задатчиком 5. Общий коаффициент передачи системы при этом определяется выражением (ТУ ТУ При равенстве коэффициентов передачи приводов К и вследствие того, что ,tU|., , а K,,,45f H/ oiU ll|2, общий коэффициент пелКо+КЧ4редачи .равен У.К., так как при резании К,, и К/ не из меняетсд, а значение ста.билизирь ющей мощности М примерно постоянно f соответствует заданию UQ , то гораздо меньше в этом случае вариации общего коэффициента усиления системы, что улучшает ее динс1мическое качество и статическую точность. При одновременной работе двух приводов вследствие независимой установки напряжений Ug возможна (Обработка детали под любым углом. Технико-экономическая эффективность предлагаемого изобретения заключается в расширении функциональных возможностей устройства и в стабилизации качества динамических и статических показателей.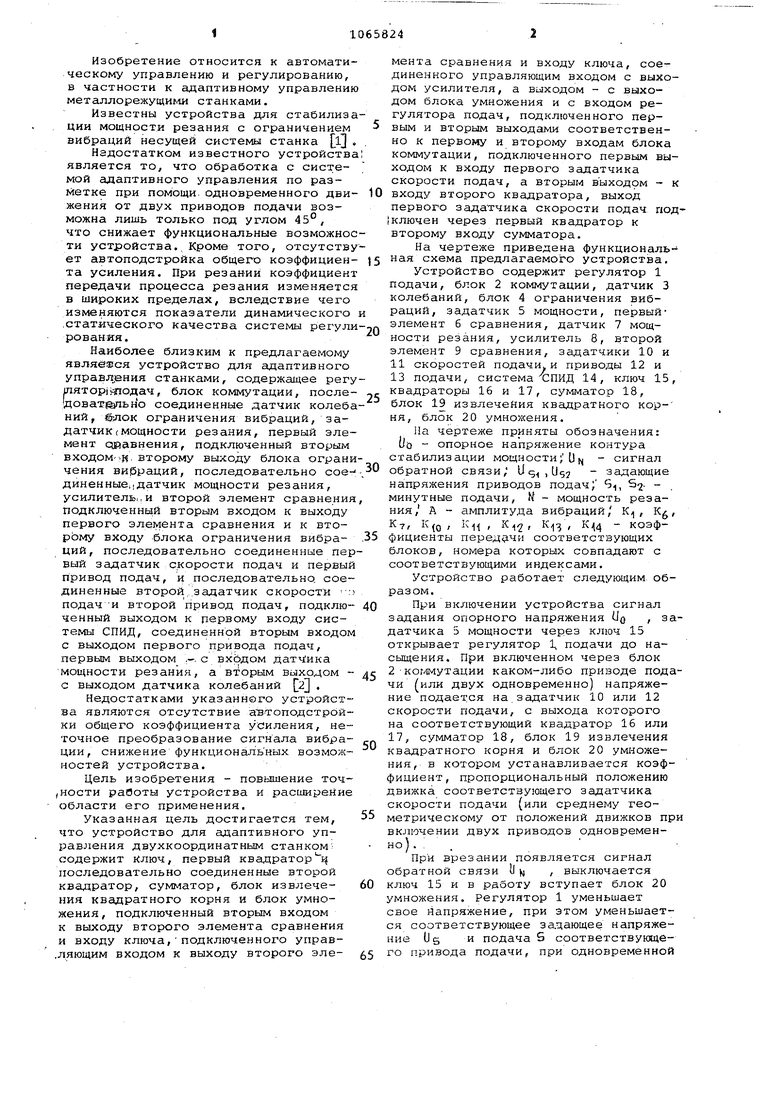
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
| Устройство для адаптивного управления двухкоординатным станком | 1989 |
|
SU1649503A2 |
| Устройство для адаптивного управления двухкоординатным станком | 1985 |
|
SU1325406A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Устройство для адаптивного управления | 1985 |
|
SU1343390A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
УСТРОЙСТВО ДЛЯ АДАПТИВНОГО УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ СТАНКОМ, содержащее регулятор подач, блок коммутации, последовательно соедит ненные датчик колебаний, блок ограничения вибраций, задат.чик мощности резания, первый элемент сравнения, подключенный вторым, входом ко второму выходу блока ограничения вибраций, последовательно соединенные датчик i MCJaiHOCTH резаниа, усилитель и второй элемент сравнения, подключенный вторым входом к.выходу первого элемента сравнения и ко второму входу блока ограничения вибраций, последовательно соединенные первый задатчик скорости подач и первый привод подач и последовательно соединенные второй задатчик скорости подач и второй привод подач, подключенный выходом к первому входу системы СПИД, соединенной вторым входом с выходом первого привода подач, первым выходом с входом датчика мощности резания, а вторым выходом - с выходом датчика колебаний, отличающееся тем, что, с целью повьшения точности и расширения его функциональных возможностей, оно содержит ключ, первый квадратор и последовательно соединенные второй квадратор, сумматор, блок извлечения квадратного корня и блок умножения, подключенный вторым входом к выходу второго элемента сравнения ивходу ключа, подключенного (Л управляющим входом к выходу второго элемента сравнения и входу ключа, соединенного управляющим входом с выходом усилителя, а выходом - с выходом блока умножения и с входом регулятора подач, подключенного первым и вторым выходами соответственно к первому и второму входам блока коммутации, подключенного первыг-t выходом к входу первого задатчика скоо рости подач, а вторым выходом - к входу второго квадратора, выход перел вого задатчика скорости подач подклюоо |С чен через первый квадратор к второму входу сумматора. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коваль М.И.Коробко А.В.Анализ эффективности адаптивных систем предельного регулирования | |||
| Станки и инструменты, 1981, № 6 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для адаптивного управления станком | 1977 |
|
SU684513A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
