Изобретение относится к автоматике, является дополнительным к авт.св. № 1325046 и может быть использовано при создании систем управления станком.
Цель изобретения - расширение функциональной возможности за счет установки времени переходного процесса, оптимального в смысле достижения суммарной ошиб- ки при данной скорости изменения входного воздействия и данной дисперсии случайной помехи.
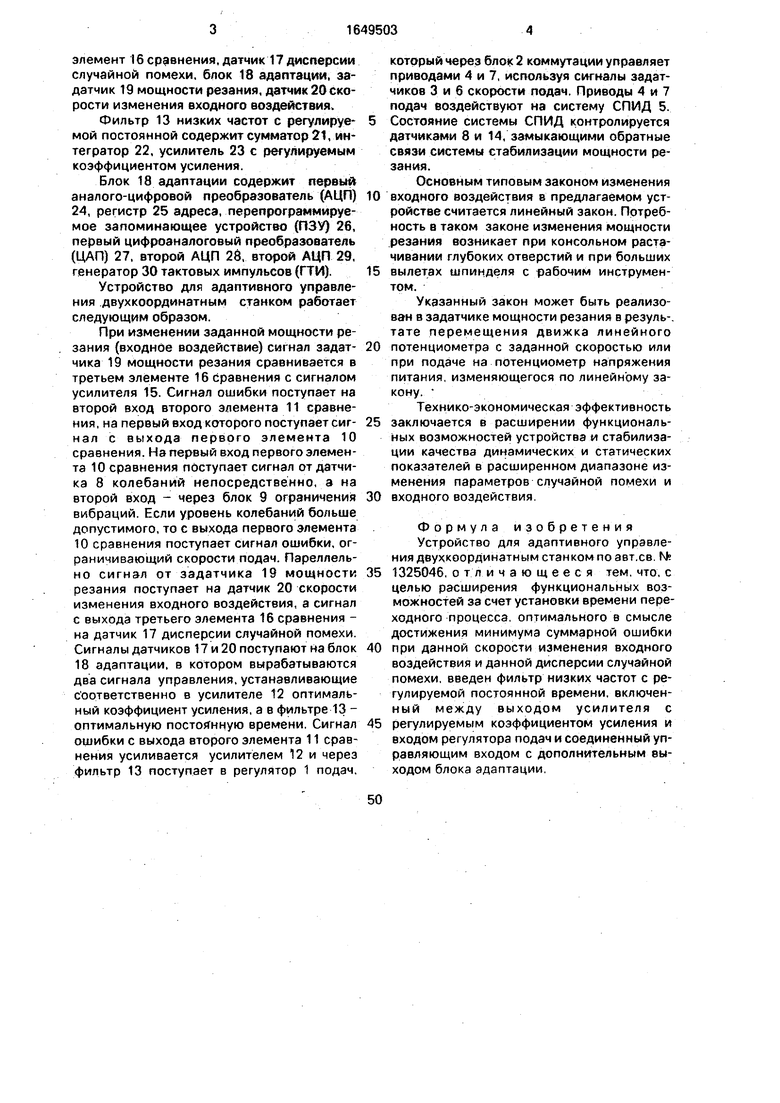
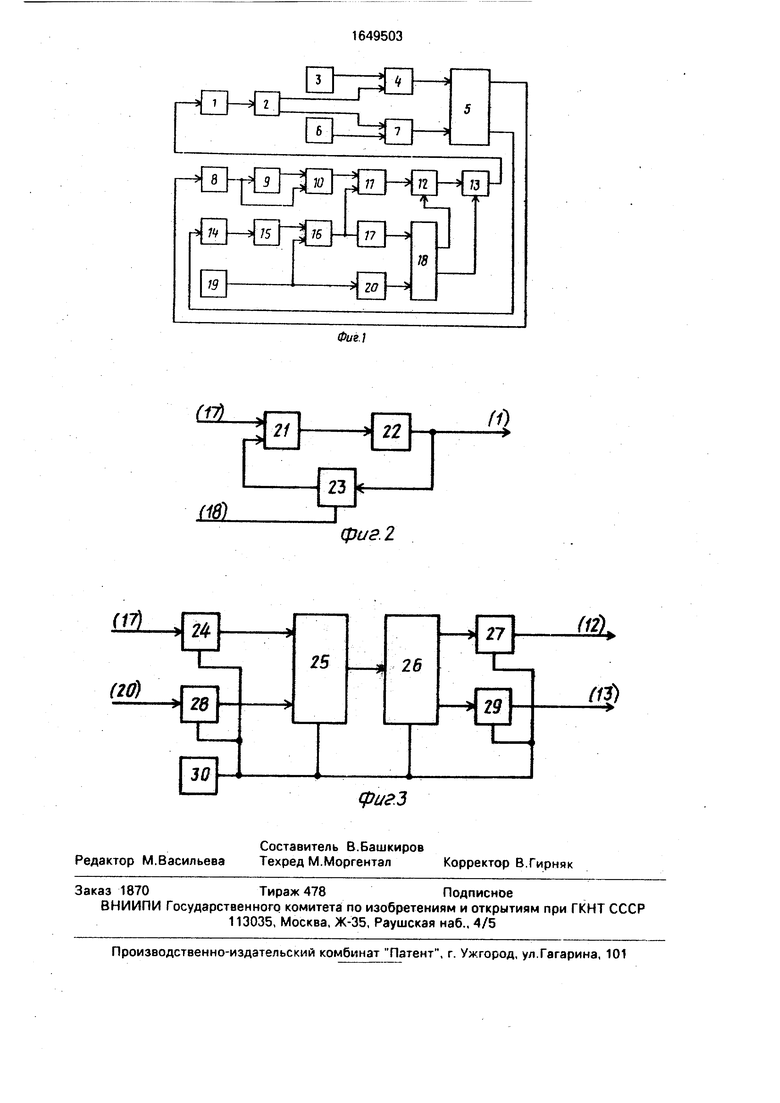
На фиг. 1 представлена функциональная схема устройства для адаптивного управления двухкоординатным станком; на фиг,2 - то же, фильтра низких частот с регулируемой постоянной времени, на фиг. 3 - то же. блока адаптации.
Устройство для адаптивного управления двухкоординатным станком содержит регулятор 1 подач, блок 2 коммутации, первый задатчик 3 скорости подач, первый привод 4 подач, систему 5 станок-приспособление-инструмент-деталь (СПИД), второй задатчик 6 скорости подач, второй привод 7 подач, датчик 8 колебаний, блок 9 ограничения вибраций, первый элемент 10 сравнения, второй элемент 11 сравнения, усилитель 12 с регулируемым коэффициентом усиления, фильтр 13 низких частот с регулируемой постоянной времени, датчик 14 мощности резания, усилитель 15, третий
0 U
о ся
0
;со
to
элемент I б сравнения, датчик 17 дисперсии случайной помехи, блок 18 адаптации, за- датчик 19 мощности резания, датчик 20 скорости изменения входного воздействия.
Фильтр 13 низких частот с регулируемой постоянной содержит сумматор 21, интегратор 22, усилитель 23 с регулируемым коэффициентом усиления.
Блок 18 адаптации содержит первый аналого-цифровой преобразователь (АЦП) 24, регистр 25 адреса, перепрограммируемое запоминающее устройство (ПЗУ) 26, первый цифроаналоговый преобразователь (ЦАП) 27, второй АЦП 28, второй АЦП 29, генератор 30 тактовых импульсов (ГТИ).
Устройство для адаптивного управления двухкоординатным станком работает следующим образом.
При изменении заданной мощности резания (входное воздействие) сигнал задат- чика 19 мощности резания сравнивается в третьем элементе 16 сравнения с сигналом усилителя 15. Сигнал ошибки поступает на второй вход второго элемента 11 сравнения, на первый вход которого поступает сиг- нал с выхода первого элемента 10 сравнения. На первый вход первого элемента 10 сравнения поступает сигнал от датчика 8 колебаний непосредственно, а на второй вход - через блок 9 ограничения вибраций. Если уровень колебаний больше допустимого, то с выхода первого элемента 10 сравнения поступает сигнал ошибки, ограничивающий скорости подач. Пареллель- но сигнал от задатчика 19 мощности резания поступает на датчик 20 скорости изменения входного воздействия, а сигнал с выхода третьего элемента 16 сравнения - на датчик 17 дисперсии случайной помехи. Сигналы датчиков 17 и 20 поступают на блок 18 адаптации, в котором вырабатываются два сигнала управления, устанавливающие Соответственно в усилителе 12 оптимальный коэффициент усиления, а в фильтре 13 - оптимальную постоянную времени. Сигнал ошибки с выхода второго элемента 11 сравнения усиливается усилителем 12 и через фильтр 13 поступает в регулятор 1 подач,
который через блок 2 коммутации управляет приводами 4 и 7, используя сигналы задат- чиков 3 и 6 скорости подач. Приводы 4 и 7 подач воздействуют на систему СПИД 5.
Состояние системы СПИД контролируется датчиками 8 и 14, замыкающими обратные связи системы стабилизации мощности резания.
Основным типовым законом изменения
входного воздействия в предлагаемом устройстве считается линейный закон. Потребность в таком законе изменения мощности резания возникает при консольном растачивании глубоких отверстий и при больших
вылетах шпинделя с рабочим инструментом.
Указанный закон может быть реализован в задатчике мощности резания в резуяь-. тате перемещения движка линейного
потенциометра с заданной скоростью или при подаче на потенциометр напряжения питания, изменяющегося по линейному закону.
Технико-экономическая эффективность
заключается в расширении функциональных возможностей устройства и стабилизации качества динамических и статических показателей в расширенном диапазоне изменения параметров случайной помехи и
входного воздействия
Формула изобретения Устройство для адаптивного управления двухкоординатным станком по авт.ев №.
1325046, отличающееся тем, что, с целью расширения функциональных возможностей за счет установки времени переходного процесса, оптимального в смысле достижения минимума суммарной ошибки
при данной скорости изменения входного воздействия и данной дисперсии случайной помехи, введен фильтр низких частот с регулируемой постоянной времени, включенный между выходом усилителя с
регулируемым коэффициентом усиления и входом регулятора подач и соединенный управляющим входом с дополнительным выходом блока адаптации.
фиг. 2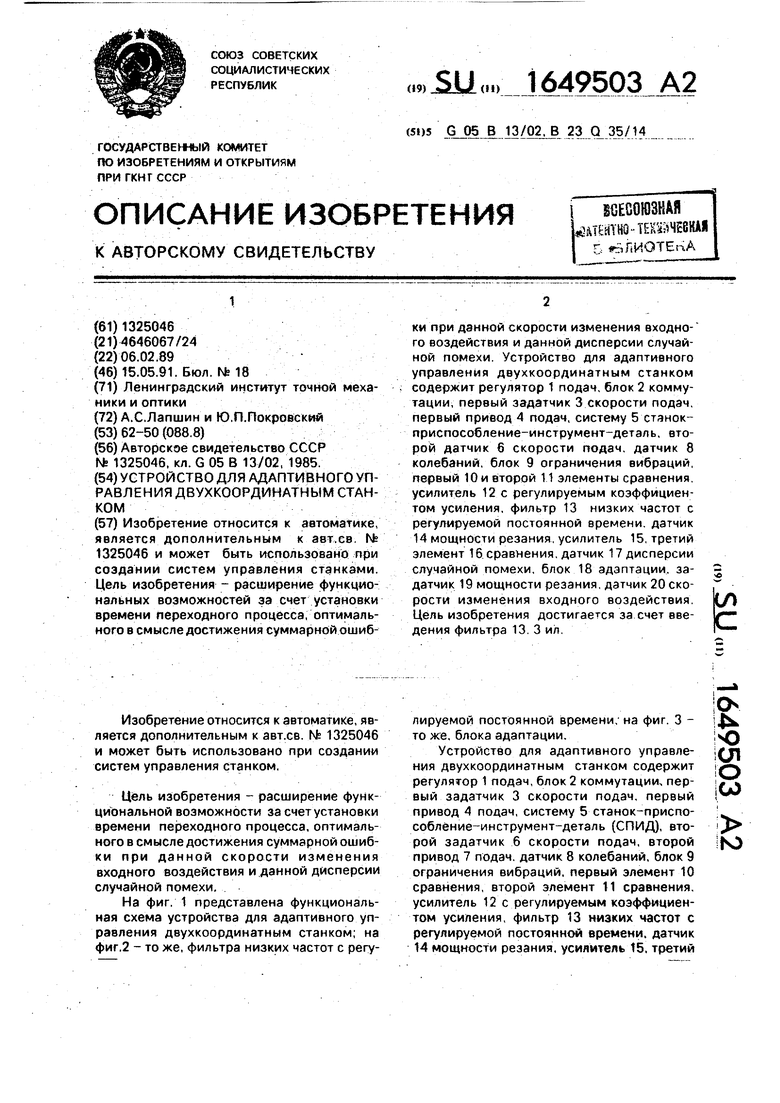
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного управления двухкоординатным станком | 1985 |
|
SU1325406A1 |
| Устройство для адаптивного управления двухкоординатным станком | 1982 |
|
SU1065824A1 |
| Устройство для адаптивного управления | 1985 |
|
SU1343390A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Адаптивное устройство для программногоупРАВлЕНия CTAHKOM | 1979 |
|
SU830313A1 |
| Устройство адаптивного управления станком | 1976 |
|
SU611179A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Устройство для управления станком с выдвижным шпинделем | 1982 |
|
SU1108393A1 |
| Система адаптивного управления | 1983 |
|
SU1133583A1 |
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
Изобретение относится к автоматике, является дополнительным к авт.ев № 1325046 и может быть использовано при создании систем управления станками. Цель изобретения - расширение функциональных возможностей за счет установки времени переходного процесса, оптимального в смысле достижения суммарной ошибки при данной скорости изменения входно- го воздействия и данной дисперсии случайной помехи Устройство для адаптивного управления двухкоординатным станком содержит регулятор 1 подач, блок 2 коммутации, первый задатчик 3 скорости подач, первый привод 4 подач, систему 5 станок- приспособление-инструмент-деталь, второй датчик 6 скорости подач, датчик 8 колебаний, блок 9 ограничения вибраций, первый 10 и второй 11 элементы сравнения усилитель 12 с регулируемым коэффициентом усиления, фильтр 13 низких частот с регулируемой постоянной времени датчик 14 мощности резания усилитель 15, третий элемент 16 сравнения, датчик 17 дисперсии случайной помехи, блок 18 адаптации, задатчик 19 мощности резания датчик 20 скорости изменения входного воздействия Цель изобретения достигаемся за счет введения фильтра 13 3 ил И
м
24
25
(20)
26
27
(12).
26
29
($
| Способ выделения изохинолина из технической изохинолиновой фракции каменноугольной смолы | 1985 |
|
SU1325046A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
