113
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управ- Ленин координатно-сверлильными станками и станками для обработки печат- ньк книг.
Цель изобретения - распмрение функциональных возможностей за счет автоматического позиционирования точек, расположенных по окружности.
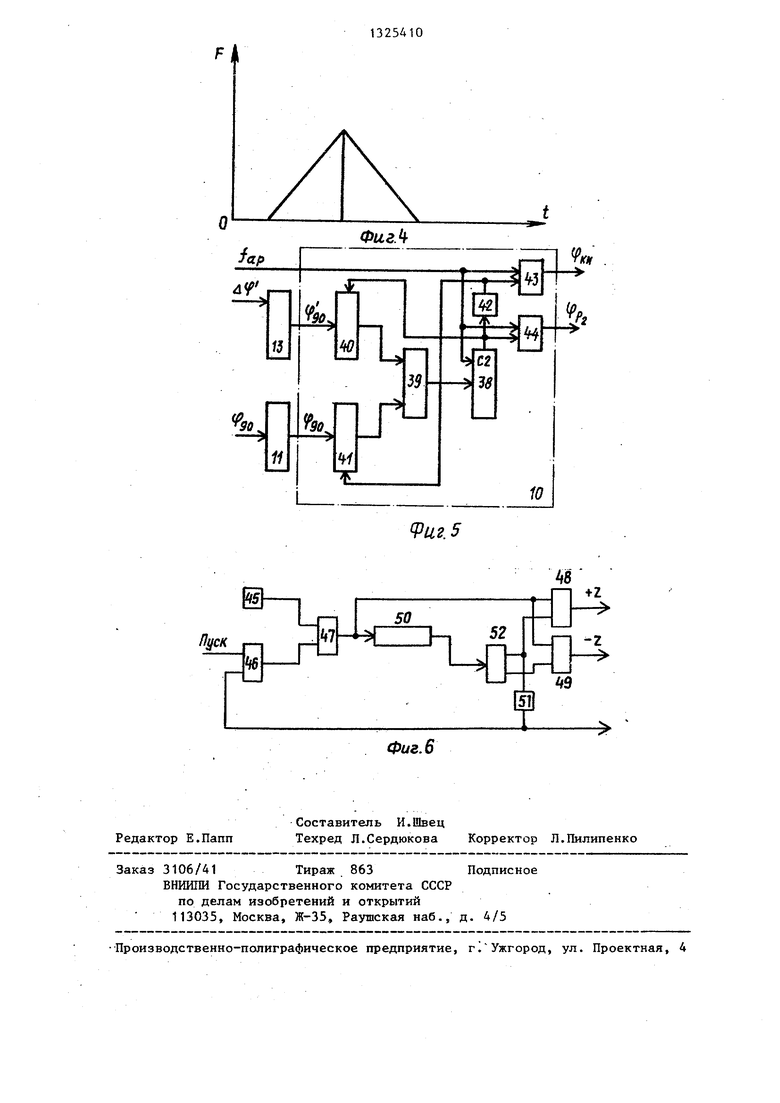
На фиг. 1 представлена общая блок- схема устройства; на фиг. 2-4 - графики, поясняющие работу устройства; на фиг, 5 - пример конкретного реше- НИН линейного интерполятора по принципу оценочной функции; на фиг. 6 - пример выполнения блока управления циклом.
Устройство для программного уп- . равления (фиг. 1) состоит из кругового интерполятора 1, построенного на цифровых дифференциальных анализаторах (ЦЦА), блок 2 задания знака координатных . перемещений,блоков 3-5 управления приводами, приводов 6 - 8, блока 9 задания скорости,линейного интерполятора 10, регистров 11 и 12, счетчиков 13 - 15 импульсов генератора 16 импульсов, триггеров 17-22, элементов ИЛИ 23 .-27 (умножения на два), блока удвоения частоты 28, блока 29 управления циклом сверления, элементов И 30-37.
Линейный интерполятор 10 не имеет особенностей, вьтолнен по известной схеме, например по оценочной функции и состоит из накапливающего сумматора 38, блока 39 элементов ШШ, блоков 40 и 41 элементов И, элемента НЕ 42, элементов И 43 и 44. Работает интерполятор 10 (фиг. 5) как все интерполяторы оценочной функции с поочередной выдачей приращений, распределяя по выходам входные импульсы в зависимости от знака оценочной функции, т.е. от соотношения V ао В линейном интерполяторе исходные величины заносятся в регистры, но в данном случае в качестве одного из регистров используется счетчик 13 импульса, который предварительно определяет величину f . Так как использование счетчика вместо регистра
нехарактерно для линейного интерполятора и определяется всей совокупностью блоков устройства, регистр 11 и счетчик 13 вынесены из линейного интерполятора 1U. Блок 29 управ
g
0 5 о
о g Q
5
10
ления циклом сверления содержит генератор 45 импульсов, триггер 46, элементы И 47-49, счетчик 50 импульсов, формирователь 51 и счетный триггер 52.
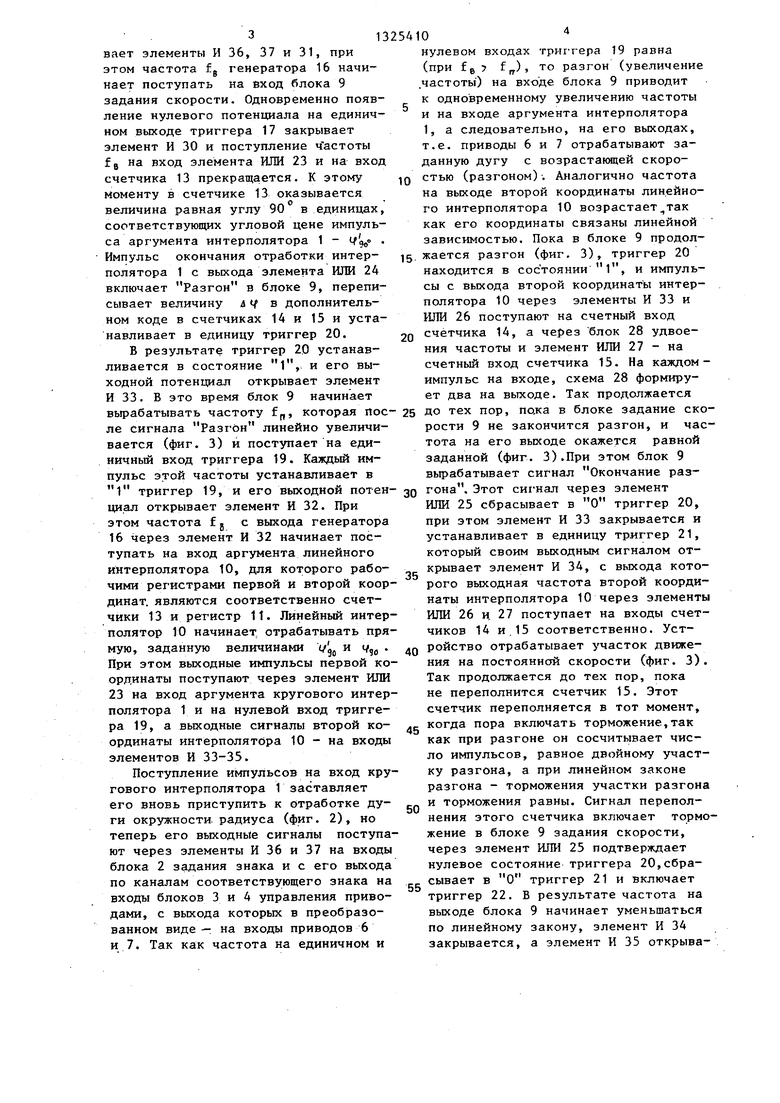
Перед началом работы информация распределяется по блокам устройства следующим образом. Величины Х„. 1 R, Y I О, ДХ R, dY R (фиг. 2), А также команда G03 (или G02) интерполяции против (по) часовой стрелки заносится в круговой интерполятор 1, величина F максимально допустимой скорости подачи в блок 9, знаки Х, aY. в блок 2,величина ifje т.е. эквивалент угла 90° - заносится в регистр 11, причем в зависимости от выбранной единицы угловых измерений это может быть 5400 или 3240005 или какое-либо другое число в зависимости от выбранной величины для измерения угла: в регистр 12 заносится величина углового рас- стояния между отверстиями 4v в тех же единицах, что и величина (зо но в дополнительном коде;все триггера и счетчики устройства сигналом предварительной установки (на фиг. 1 не показан) сброшены в О. По сигналу Пуск 1 триггеры 17 и 18 устанавливаются в состояние 1,при этом разрешающий потенциал с выхода триггера 18 поступает на вход элемента И 31, но запрещающий потенциал с нулевого выхода, триггера .17 запирает элемент И 31 по второму, входу так же, как и элементы И 36 и 37. Разрешающий потенциал с единичного выхода триггера 17 открывает элемент И 30, в результате выходная частота fj генератора 16 начинает поступать через элемент И 30 на вход счетчика 13 импульсов и элемента ИЛИ 23, с выхода которого она поступает на вход аргумента кругового интерполятора 1. В результате интерполятор 1 начинает отрабатывать окружность радиуса R (фиг. 2), при этом осуществляется поворот радиуса вектора ОА против часовой стрелки до совпадения с осью Y. Как только вектор ОА совпа- дает с осью Y, интерполятор 1 вырабатывает сигн ал Оконча;ние отработки, который поступает на вход элемента ИЛИ 24 и нулевой вход триггера 17. Триггер 17 переключается в состояние нуля, причем единичный потенциал с его нулевого выхода откры31325410
ВЕхет элементы Н 36, 37 и 31, принулевом входах тригтера 19 равна
этом частота fg генератора 16 нами-(при f гу) о разгон (увеличение
нает поступать на вход блока 9.частоты ) на входе блока 9 приводит
задания скорости. Одновременно появ-к одновременному увеличению частоты
ление нулевого потенциала на единич-и на входе аргумента интерполятора
ном выходе триггера 17 закрывает1,3 следовательно, на его выходах,
элемент И 30 и поступление ч астотыт.е. приводы 6 и 7 отрабатывают эаf в на вход элемента ИЛИ 23 и на входданную дугу с возрастающей скоросчетчика 13 прекращается. К этому IQстью (разгоном); Аналогично частота
Моменту в счетчике 13 оказываетсяна выходе второй координаты линейновеличина равная углу 90 в единицах,го интерполятора 10 возрастает так
соответствующих угловой цене импуль-как его координаты связаны линейной
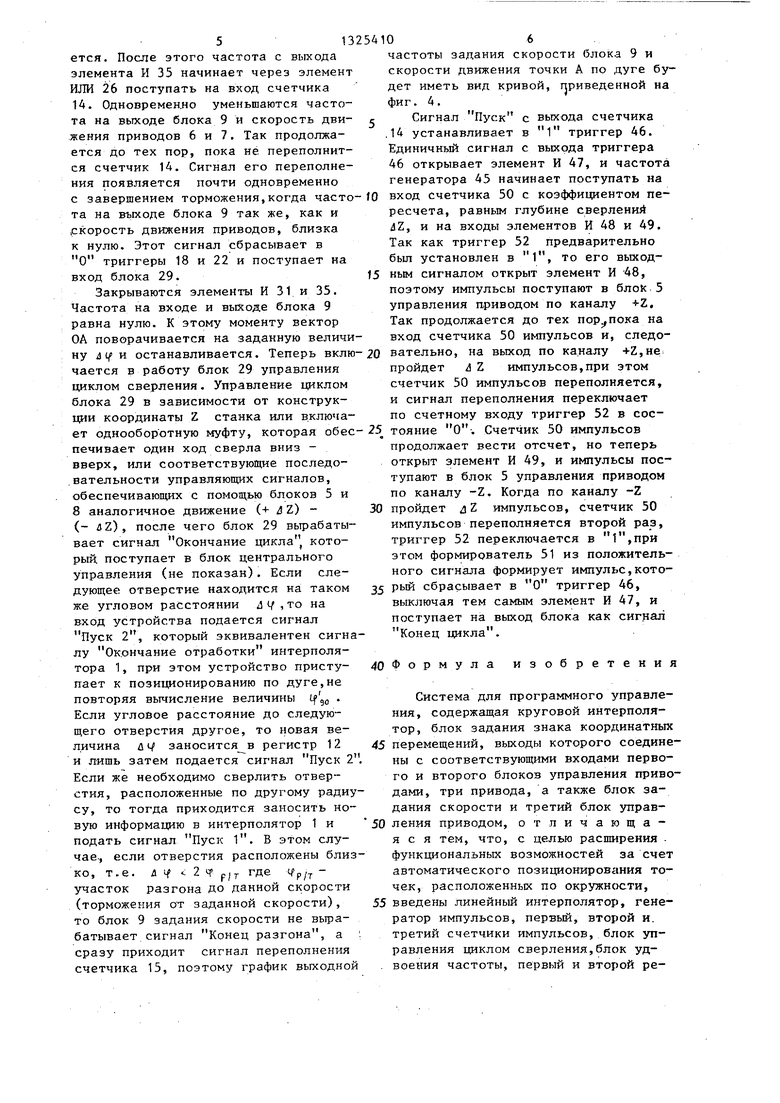
са аргумента интерполятора 1 - .зависимостью. Пока в блоке 9 продол Импульс окончания отработки интер- 15жается разгон (фиг. 3), триггер 20
полятора 1 с выхода элемента ИЛИ 24находится в сос тоянии 1, и импульвключает Разгон в блоке 9, перепи-сы с выхода второй координаты интерсывает величину & в дополнитель-полятора 10 через элементы И 33 и
ном коде в счетчиках 14 и 15 и уста-ИЛИ 26 поступают на счетный вход
навливает в единицу триггер 20. 20счетчика 14, а через блок 28 удвоеВ результате триггер 20 устанав-ния частоты и элемент ИЛИ 27 - на ливается в состояние 1, и его вы-счетный вход счетчика 15. На каждом- ходной потенциал открывает элементимпульс на входе, схема 28 формиру- И 33. В это время блок 9 начинаетет два на выходе. Так продолжается вьфабатывать частоту f, которая пос- 25До тех пор, пака в блоке задание сколе Сигнала Разгон линейно увеличи-рости 9 не закончится разгон, и час- вается (фиг. 3) и поступает на еди-тота на его выходе окажется равной ничный вход триггера 19. Каждый им-заданной (фиг. 3).При этом блок 9 пульс этой частоты устанавливает ввырабатывает сигнал Окончание раз- 1 триггер 19, и его выходной потен- зогона. Этот сигнал через элемент циал открывает элемент И 32. ПриИЛИ 25 сбрасывает в О триггер 20, этом частота fg с выхода генераторапри этом элемент И 33 закрывается и 16 через элемент И 32 начинает пос-устанавливает в единицу триггер 21, тупать на вход аргумента линейногокоторый своим выходным сигналом от- интерполятора 10, для которого рабо-крывает элемент И 34, с выхода кото- чими регистрами первой и второй коор-рого выходная частота второй коорди- динат. являются соответственно счет-наты интерполятора 10 через элементы чики 13 и регистр It. Линейный иитер-ИЛИ 26 и, 27 поступает на входы счет- полятор 10 начинает, отрабатывать пря-чиков 14 и. 15 соответственно. Устную, заданную величинами t/L и 40Ройство отрабатывает участок движе- При этом выходные импульсы первой ко-ния на постоянной скорости (фиг. 3). ординаты поступают через элемент ИЛИТак продолжается до тех пор, пока 23 на вход аргумента кругового интер-не переполнится счетчик 15. Этот полятора 1 и на нулевой вход тригге-счетчик переполняется в тот момент, ра 19, а выходные сигналы второй ко- скогда пора включать торможение,так ординаты интерполятора 10 - на входыкак при разгоне он сосчитывает чис- элементов И 33-35.ло импульсов, равное двойному участПоступление импульсов на вход кру-ку разгона, а при линейном законе гового интерполятора 1 заставляетразгона - торможения участки разгона его вновь приступить к отработке ду- Qи торможения равны. Сигнал переполги окружности радиуса (фиг. 2), нонения этого счетчика включает тормо- теперь его выходные сигналы поступа-жение в блоке 9 задания скорости, ют через элементы И 36 и 37 на входычерез элемент ИЛИ 25 подтверждает блока 2 задания знака и с его выходанулевое состояние триггера 20,сбра- по каналам соответствующего знака насывает в О триггер 21 и включает входы блоков 3 и 4 управления приво-триггер 22. В результате частота на дами, с вькода которых в преобразо-выходе блока 9 начинает уменьшаться ванном виде- на входы приводов 6по линейному закону, элемент И 34 и 7. Так как частота на единичном изакрывается, а элемент И 35 открывается. После этого частота с выхода элемента И 35 начинает через элемент ИЛИ 26 поступать на вход счетчика 14. Одновременно уменьшаются частота на выходе блока 9 и скорость движения приводов 6 и 7. Так продолжается до тех пор, пока не переполнится счетчик 14. Сигнал его переполнения появляется почти одновременно
с завершением торможения,когда часто-fO вход счетчика 50 с коэффициентом пета на въгходе блока 9 так же, как и .скорость движения приводов, близка к нулю. Этот сигнал сбрасывает в О триггеры 18 и 22 и поступает на вход блока 29.
Закрываются элементы И 31 и 35. Частота на входе и выходе блока 9 равна нулю. К этому моменту вектор
ресчета, равным глубине сверлений 4Z, и на входы элементов И 48 и 49. Так как триггер 52 предварительно был установлен в 1, то его выход- 15 ным сигналом открыт элемент И 48, поэтому импульсы поступают в блок 5 управления приводом по каналу +Z, Так продолжается до тех пор.,пока на вход счетчика 50 импульсов и, следоОА поворачивается на заданную величину /з t/ и останавливается. Теперь вклю-20 вательно, на выход по каналу +Z,He чается в работу блок 29 управления пройдет Л Z импульсов,при этом циклом сверления. Управление циклом блока 29 в зависимости от конструкции координаты Z станка или включасчетчик 50 импульсов переполняется, и сигнал переполнения переключает по счетному входу триггер 52 в сосет однооборотную муфту, которая обес- 25 тояние О. Счетчик 50 импульсов
печивает один ход сверла вниз - вверх, или соответствующие последо- .вательности управляющих сигналов, обеспечивающих с помощью блоков 5 и 8 аналогичное движение (+ 2) - (- лZ), после чего блок 29 вырабатывает сигнал Окончание цикла который, поступает в блок центрального управления (не показан). Если следующее отверстие находится на таком же угловом расстоянии Л -f ,то на вход устройства подается сигнал Пуск 2, который эквивалентен сигналу Окончание отработки интерполятора 1, при этом устройство приступает к позиционированию по дуге,не повторяя вычисление величины ( . Если угловое расстояние до следующего отверстия другое, то новая величина й заносится в регистр 12 и лишь затем подается сигнал Пуск 2 Если же необходимо сверлить отверстия, расположенные по другому радиусу, то тогда приходится заносить новую информацию в интерполятор 1 и подать сигнал Пуск 1. В этом случае., если отверстия расположены близко, т.е. лч с2ч р 7. где Vp/. - участок разгона до данной скорости (торможения от заданной скорости), то блок 9 задания скорости не вьфа- батывает сигнал Конец разгона, а ; сразу приходит сигнал переполнения счетчика 15, поэтому график выходной
частоты задания скорости блока 9 и скорости движения точки А по дуге будет иметь вид кривой, приведенной на фиг. 4.
Сигнал Пуск с выхода счетчика .14 устанавливает в 1 триггер 46. Единичный сигнал с выхода триггера 46 открывает элемент И 47, и частота генератора 45 начинает поступать на
ресчета, равным глубине сверлений 4Z, и на входы элементов И 48 и 49. Так как триггер 52 предварительно был установлен в 1, то его выход- ным сигналом открыт элемент И 48, поэтому импульсы поступают в блок 5 управления приводом по каналу +Z, Так продолжается до тех пор.,пока на вход счетчика 50 импульсов и, следовательно, на выход по каналу +Z,He пройдет Л Z импульсов,при этом
вательно, на выход по каналу +Z,He пройдет Л Z импульсов,при этом
счетчик 50 импульсов переполняется, и сигнал переполнения переключает по счетному входу триггер 52 в соспродолжает вести отсчет, но теперь открыт элемент И 49, и импульсы поступают в блок 5 управления приводом по каналу -Z. Когда по каналу -Z
30 пройдет а Z импульсов, счетчик 50 импульсов переполняется второй раз, триггер 52 переключается в 1,при этом формирователь 51 из положительного сигнала формирует импульс,кото35 рый сбрасывает в О триггер 46, выключая тем самым элемент И 47, и поступает на выход блока как сигнал Конец цикла.
40 Формула изобретени
Система для программного управления, содержащая круговой интерполятор, блок задания знака координатных
45 перемещений, выходы которого соединены с соответствующими входами первого и второго блоков управления приводами, три привода, а также блок задания скорости и третий блок управ50 ления приводом, отличающаяся тем, что, с целью расширения . функциональных возможностей за счет автоматического позиционирования точек, расположенных по окружности,
55 введены линейный интерполятор, генератор импульсов, первый, второй и. третий счетчики импульсов, блок управления циклом сверления,блок уд- . воения частоты, первый и второй ре71
гистры, шесть трип еров, восемь элементов И, пять элементов ИЛИ, причем выход генератора импульсов соединен с первыми входами второго,первого и третьего элементов И,второй вход третьего элемента И соединен с прямым выходом первого триггера,выход - с информационным входом первого счетчика импульсов и с первым входом первого элемента ИЛИ,второй вход которого подключен к первому входу линейного интерполятора и к первому входу второго триггера, а выход - к входу аргумента кругового интерполятора, информационные входы которого соединены с входами системы для программного управления,первый и второй выходы кругового интерполятора соединены с первым входом четвертого и пятого элементов И, тре- тий выход - с первым входом второго элемента ИЛИ и с установочным входом первого триггера, инверсный выход которого подключен к вторым входам четвертого и пятого .элементов И и к второму входу второго элемента И, соединенного третьим входом с прямым выходом третьего триггера, первый установочный вход которого соединен с вторым установочным вхо- дом первого триггера и с входом Пуск 1 системы для программного управления, второй установочный вход третьего триггера соединен с вторым входом второго элемента ИЛИ, и с входом Пуск 2 системы, счетный .вход - со счетным входом четвертого триггера, а выходом первого счетчика импульсов и с входом блока управлеп ния циклом, выход которого через третий блок управления приводом подключен к входу третьего привода,выход второго элемента И соединен с информационным входом блока задания скорости, вход Разгон которого подключен к выходу второго элемента ИЛИ, к первому входу пятого .триггера и к установочным входам первого и
108
второго счетчиков импульсов,информационные входы которых соединены с выходами первого регистра,а входыоб- нуления - с выходами соответственно третьего и четвертого элементов ИЛИ, первый вход третьего и четвертого элементов ИЛИ соединен с выходом четвертого элемента Невыход пятого элемента и подключен к второму входу третьего элемента ИЛИ, третий вход которого соединен с выходом шестого элемента И и через блок удвоения - с вторым входом четвертом элемента ИЛИ, второй выход линейного интерполятора подключен к первому входу четвертого, пятого и шестого элементов И, вторые входы которьк соединены с прямыми выходами соответственно шестого,четвертого и пятого триггеров, второй вход пятого триггера соединен с выходом пятого элемента ИЛИ, первый вход которого подключен к выходу Окончание разгона блока задания скорости и к первому входу шестого триггера, второй вход которого соединен с вторым входом пятого элемента ИЛИ, с вторым входом четвертого триггера, с третьим входом блока задания скорости и с выходом второго счетчика импульса, выход частоты блока задания скорости соединен с вторым входом второго триггера, выход которого соединен с вторым входом первого элемента И,подключенного выходом к установочному входу линейного интерполятора, первый информационный вход которого соединен с выходом первого счетчика импульсов, второй информационный вход - с выходом второго регистра,а выходы четвертого и пятого элементов И соединены соответственно с первым и вторьт входами блока задания знаков, установочные входы которого подключены к входам задания системы для программного управления , выход которой соединен с вторым выходом блока управления циклом.
/яУ| 5.У
У Л
V
Ок.отр.
Uf F- ,
(риг.1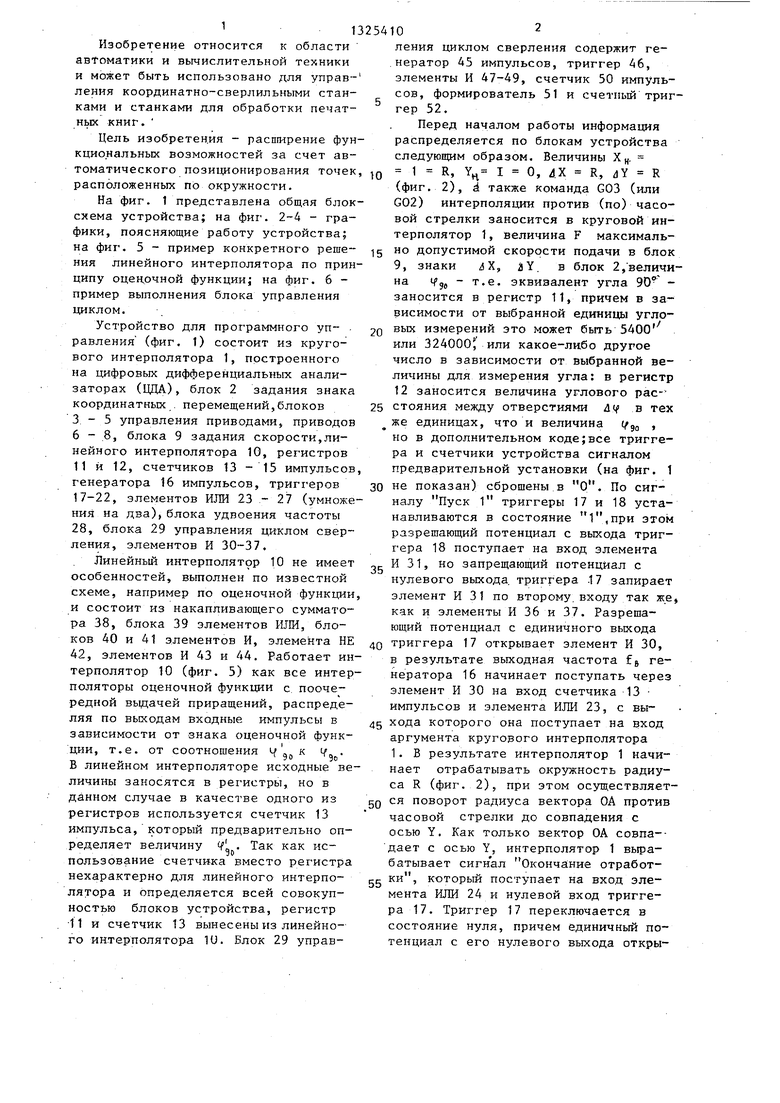
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления координатно-сверлильными станками и станками для обработки печатных плат. Цель изобретения - расширение функциональных возможностей за счет автоматического позиционирования точек, расположенных по окружности.Система для программного управления содержит круговой и линейный интерполяторы, регистры, три счетчика импульсов, блоки задания скорости и знаков координатных перемещений, блоки управления приводами, блок управления циклом сверления, генератор иьшуль- сов, триггеры, элементы ИЛИ,блок удвоения частоты. В данно1| решении, импульсы аргумента угла i/ кругового интерполятора, имеющие физический смысл приращений угла поворота радиуса вектора, подсчитываются счетчиком и используются в дальнейшем для определения момента вклкмения торможения. 6 ил. i (Л 00 to СД
о р
Фиг. 3
1325410
ФигЛ
/
IfK
VU2.5
Пцск
Аб
-I +Z
-2
Редактор Е.Папп
Составитель И.Швец
Техред Л.Сердюкова Корректор Л.Пилипенко
Заказ 3106/41 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г1 Ужгород, ул. Проектная, 4
Фиг. 6
| Авторское свидетельство СССР IP 760031, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
