113
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления ко- ординатно-сверлильными станками и станками для обработки печатных плат
Цель изобретения - расширение функциональных возможностей системы путем автоматического позиционирования, точек, расположенных по окружности.
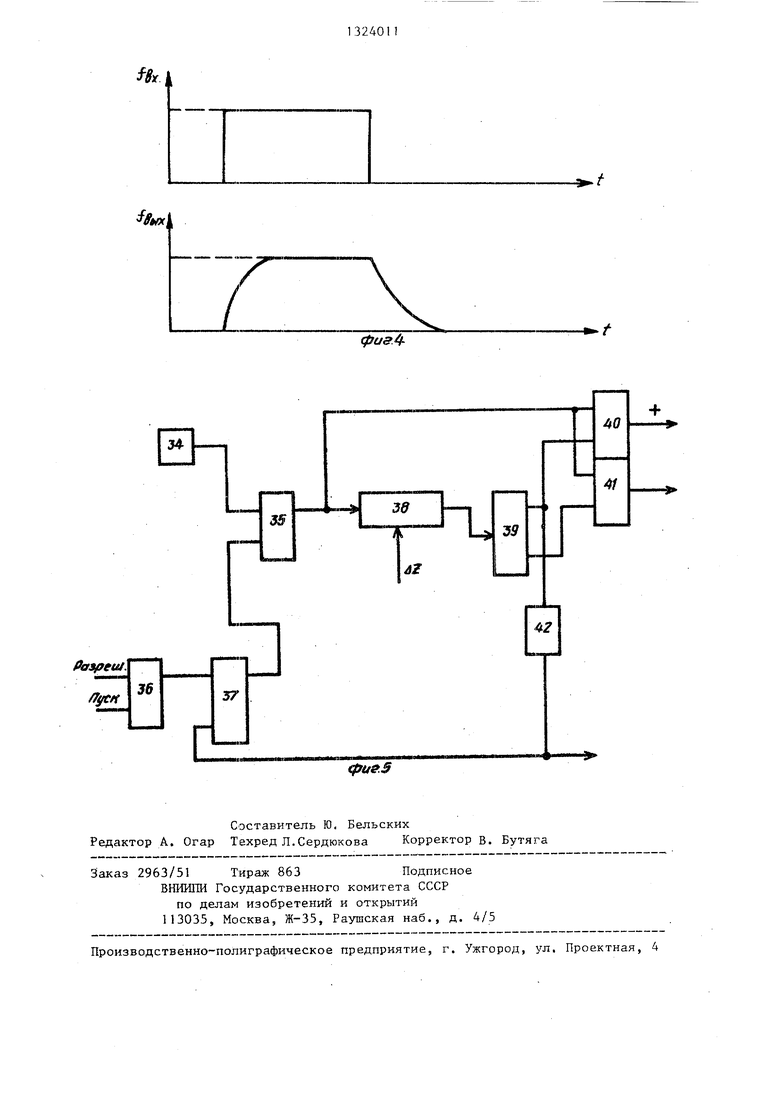
На фиг,.1 представлена схема предлагаемой системы; на фиг. 2 - график поясняющий работу интерполятора; на фиг. 3 - схема блока задержки; на фиг. 4 - графики изменения частот на входе и выходе блока задержки; на фиг. 5 - схема блока управления циклами.
Система (фиг. О состоит из круго
-
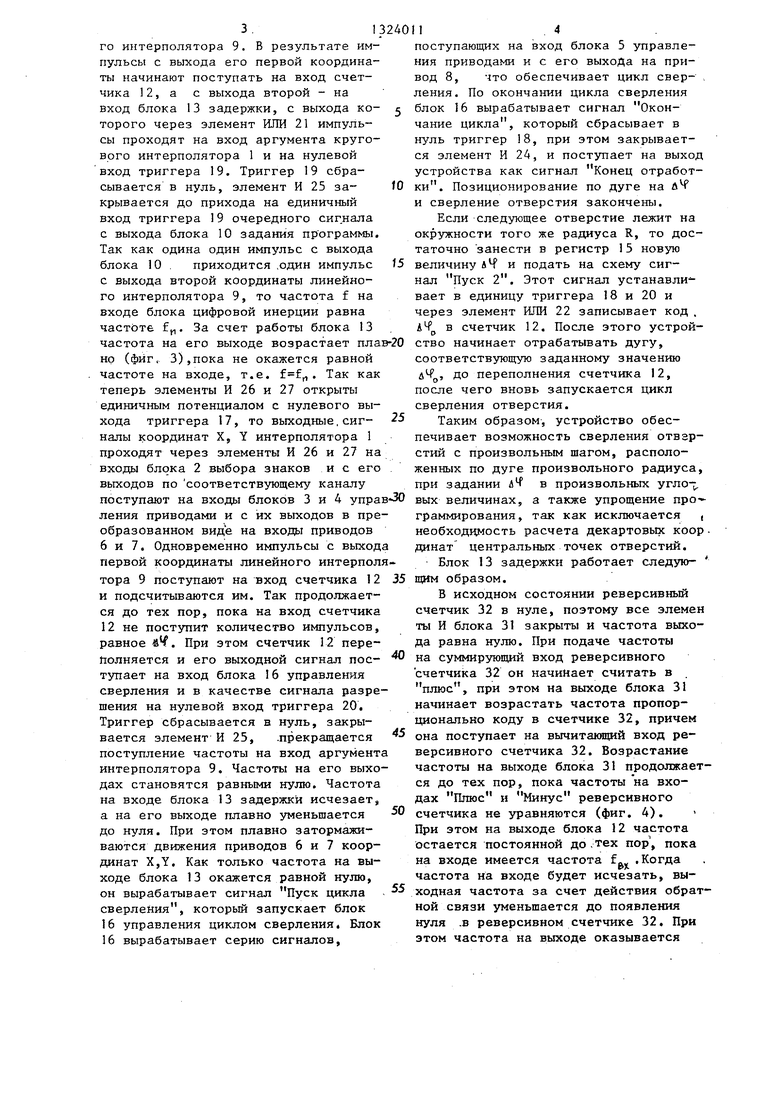
вого интерполятора 1, построенного на цифровых дифференциальных анализаторах (ЦДА), блока 2 задания знака блоков 3-5 управления приводами, исполнительных приводов б-В, линейного двз координатного интерполятора 9, блока 10 задания скорости, счетчика 11, счетчика 12 с переменным коэффициентом деления, блока 13 задержки, регистров 14 и 15 блока 1 управления циклом сверления, триггеров 17-20, элементов ИЛИ 21 и 22, элементов И 23-27 и генератора 28 импульсов. Блок 13 (фиг. 2) содержи генератор 29 высокой частоты, счетчик-распределитель 30, блок 31 элементов И-ИЛИ, реверсивный счетчик 32 и элемент 33 совпадения на нуль. Блок 16 управления циклом (фиг. 3) может быть выполнен на генераторе 34 элементах И 35 и 36, триггере 37, счетчике 38, счетном триггере 39, элементах И 40 и 41 и формировате - ле 42.
Перед началом работы информация заносится в блоки устройства следующим образом.
В рабочие регистры кругового интерполятора 1 заносятся величины , , , , в регистр 14, который является рабочим регистром первой координаты линейного интерполятора 9, заносится величина Ч , равная 90 в принятой системе отсчета, т.,е.в градусах, мину- .тах, секундах или других угловых величинах, в регистр 15, который является регистром установки счетчика с переменным коэффициентом деления
12, заносится A - дополнительный код углового расстояния между отверстиями в тех же единицах, что и ве личина, зенесенная в регистр 14, в блок 10 задания скорости заносится код5 максимальной для данного радиуса угловой скорости, все титриггера и счетчик 11 сброшены в нуль, в блок 2 занесены знаки перемещений по X и Y.
По сигналу Пуск 1 триггера 17 и 18 устанавливаются в состояние единицы. При этом открывается элемент И 23 (элемент И 24 закрыт нулевым выходом триггера 17) и частота генератора 28 через элемент ИЛИ 21 начинает поступать на вход аргумента кругового интерполятора 1 и вход счетчика 11. Интерполятор начинает отрабатывать заданную ин- формацию в результате чего вектор ОА (фиг. 2) поворачивается до тех
пор, пока не совпадет займет положен:ие ОА ные сигналы на блок
с осью Y, т.е. , но его вьпсод- 2 не поступают.
0
0
так как закрыты элементы И 26 и 27. Как только вектор ОА совместится с осью Y, интерполятор 1, вырабатывает сигнал окончание отработки, который сбрасывает в нуль триггер 17, устанавливает в единицу триггерр 20 и через элемент ИЛИ 22 поступает на вход записи кода счетчика 12, в результате чего в счетчик 12 с выхо- 5 Дов регистра 15 заносится величина АПд. Триггер 17 сигналом нуля за.т крывает. элемент И 23, в результате чего прохождение частоты f. на вход интерполятора I через элемент ИЛИ 2Г и на вход счетчика 11 прекращается. При этом в счетчике 11 оказывается величина, численно равная углу 90 в имп шьсах аргумента интерполятора 1. Так как на втором.управляющем входе эхгемента И 24 теперь появ.пяется разрешающий потенциал, то он открывается и импульсы генератора 28 начинают поступать на вход блока 10 задания скорости, в результате чего на его выходе появляется частоКаждый
0
5
0
та подачи f„, причем
Vf,,
5
импульс частоты „ устанавливает в единицу триггер 19, в результате чего открывается элемент И 25, так как нак его втором управляющем входе - единичный потенциал с выхода, тригге - ра 20, и импульсы частоты fj. начинают поступать на вход аргумента линейно3.13
го интерполятора 9. В результате импульсы с выхода его первой координаты начинают поступать на вход счетчика 12, а с выхода второй - на вход блока 13 задержки, с выхода ко- торого через элемент ИЛИ 21 импульсы проходят на вход аргумента кругового интерполятора 1 и на нулевой вход триггера 19. Триггер 19 сбрасывается в нуль, элемент И 25 за- крывается до прихода на единичный вход триггера 19 очередного сиг.нала с выхода блока 10 задания программы. Так как одина один импульс с выхода блока 0 . приходится .один импульс с выхода второй координаты линейного интерполятора 9, то частота f на входе блока цифровой инерции равна частоте . За счет работы блока 13 частота на его выходе возрастает плав но (фйг 3),пока не окажется равной частоте на входе, т.е. .. Так как теперь элементы И 26 и 27 открыты единичным потенциалом с нулевого выхода триггера 17, то выходные,сиг- налы координат Х, Y интерполятора 1 проходят через элементы И 26 и 27 на входы блока 2 выбора знаков и с его выходов по соответствующему каналу поступают на входы блоков 3 и 4 управ Ленин приводами и с их выходов в преобразованном виде на входы приводов 6 и 7. Одновременно импульсы с выхода первой координаты линейного интерполятора 9 поступают на вход счетчика 12 и подсчитываются им. Так продолжается до тех пор, пока на вход счетчика 12 не поступит количество импульсов, равное вЧ. При этом счетчик 12 пере йолняется и его выходной сигнал пес- тупает на вход блока 16 управления сверления и в качестве сигнала разрешения на нулевой вход триггера 20, Триггер сбрасывается в нуль, закрывается элемент И 25, .прекращается поступление частоты на вход аргумента интерполятора 9, Частоты на его выходах становятся равными нулю. Частота на входе блока 13 задержки исчезает, а на его выходе плавно уменьшается до нуля. При этом плавно затормаживаются движения приводов 6 и 7 координат X,Y. Как только частота на выходе блока 13 окажется равной нулю, он вырабатывает сигнал Пуск цикла - сверления, который запускает блок 16 управления циклом сверления. Блок 16 вырабатывает серию сигналов.
O 5 0 О 5
0
II.4
поступающих на вход блока 5 управле ния приводами и с его выхода на привод 8, что обеспечивает цикл свер- . ления. По окончании цикла сверления блок 16 вырабатывает сигнал Окончание цикла, который сбрасывает в нуль триггер 18, при этом закрывается элемент И 24, и поступает на выход устройства как сигнал Конец отработки. Позиционирование по дуге на лЧ и сверление отверстия закончены.
Если следующее отверстие лежит на окружности того же радиуса R, то достаточно занести в регистр 15 новую величину и подать на схему сигнал Пуск 2. Этот сигнал устанавли вает в единицу триггера 18 и 20 и через элемент ИЛИ 22 записывает код , АЧ р в счетчик 12. После этого устройство начинает отрабатывать дугу, соответствующую заданному значению &, до переполнения счетчика 12, после чего вновь запускается цикл сверления отверстия.
Таким образом, устройство обеспечивает возможность сверления отвгр- стий с произвольным шагом, расположенных по дуге произвольного радиуса, при задании Л Ч в произвольных угло-;, вых величинах, а также упрощение про- граммирования, так как исключается ( необходимость расчета декартовьрс коор. динат центральных точек отверстий.
Блок 13 задержки работает следую- щим образом.
В исходном состоянии реверсивный счетчик 32 в нуле, поэтому все элемен ты И блока 31 закрыты и частота выхода равна нулю. При подаче частоты на суммирующий вход реверсивного счетчика 32 он начинает считать в плюс, при этом на выходе блока 31 начинает возрастать частота пропорционально коду в счетчике 32, причем она поступает на вычитающий вход реверсивного счетчика 32. Возрастание частоты на выходе блока 31 продолжается до тех пор, пока частоты на входах Плюс и Минус реверсивного счетчика не уравняются (фиг. 4). При этом на выходе блока 12 частота остается постоянной до.тех пор пока на входе имеется частота f- .Когда частота на входе будет исчезать, выходная частота за счет действия обратной связи уменьшается до появления нуля -В реверсивном счетчике 32, При этом частота на выходе оказывается
513
равной нулю. Нулевое состояние реверсивного счетчика фиксируется элементом 33 совпадения на нуль, и на его выходе появляется сигнал Нуль инерции. При наличии на выходе элемента И 36 сигнала разрешения с выхода счетчика 15 сигнал Пуск с выхода блока 12 проходит через элемент И 36 и устанавливает в единицу триггер 37. Единичный сигнал с выхода триггера 37 открывает элемент И 35, и частота 34 начинает поступать на вход счетчика 38 с коэффициентом пересчета, равным глубине сверление Д2, и на входы элементов И 40 и 41. Так как триггер 39 предварительно был установлен в единицу, то его выходным сигналом открыт элемент И 40, поэтому импульсы поступают н блок 5 по каналу +Z. Так продошкается до тех пор, пока на вход счетчика 38 и, следовательно, на выход по каналу +Z не пройдет iZ импульсов, при этом счетчик 38 переполняется и сигнал переполнения переключает по счетному входу триггер 39 в состояние нуля. Счетчик 38 продолжает вести отсчет, но теперь открыт элемент И 41,и импульсы поступаязт в блок 5 по каналу -Z. Когда по каналу -Z пройдет uZ им- пульсов, счетчик 38 переполняется второй раз, триггер 39 переключается в единицу, а формирователь 42 из положительного перепада формирует импульс который, сбрасывает в нуль триггер 37, выключая тем самым элемент И 35, и поступает на выход блока как сигнал Конец цикла.
Формула изобретения
Система для программного управления, содержащая круговой интерполя тор, последовательно; соединенные блочки задания знака координатных перемещений, первый и второй блоки управ-
ления приводами, первьпй и второй приводы,блок задания скорости и после довательно соединенные третий блок управления приводом и третий привод, отл и чающаяся тем, что, , с целью расширения функциональных возможностей системы, з нее введены генератор, блок управления циклом сверления, блок задержки, первый и
второй счетчики, первый, второй, третий и четвертый триггеры, первьш и второй элементы ИЛИ, с первого по пятый элементы И, линейный интерполятор, первый и второй регистры, причем первые входы первого и второго триггеров объединены между собой, первый выход первого .из них присоединен к входу первого элемента И, второй выход - к входам BTOporOj четвертого и пятого элементов И, выход первого элемента И присоединен к входам первого элемента ИЛИ и пер- вого счетчика, выходы которого подключены к первым входам линейного интерполятора, выход первого элемента ИЛИ присоединен ко входу аргумента кругового интерполятора, третий выход которого подключен ко второму входу первого триггера, к первому входу четвертого триггера и первому входу второго элемента ИЛИ, выход которого подключен к входу Запись второго счетчика, выторой вход второго триггера объединен с вторым входом четвертого триггера и вторым входом второго элемента ИЛИ, выход второго триггера подключен к входу второго элемента И, выход которого при соединен к входу блока задания скорости, выход генератора подключен к входам первого, второго и третьего элементов И, причем выход последнего соединен с входом аргумента линейного интерполятора, выход блока задания скорости присоединен к первому входу третьего триггера, выхоД котор го подключен к входу третьего элемента И, а второй вход соединен с первым выходом линейного интерполятора и входом задержки, первый выход которой присоединен к входу первого элемента ИЛИ, а второй выход к входу блока управления циклом, первые выходы которого присоединены к входам третьего блока управления- приводами, а второй выход - к третьему входу второго триггера, выход первого регистра присоединен к вторым входам линейного интерполятора, второй выход которого подключен к счетному входу второго счетчика, кодовые входы которого присоединены к выходам второго регистра, выход второго счетчика присоединен к входу блока управления циклом и третьему входу четвертого триггера, выход которого подключен к входу третьего элементаИ
0(нУн.
29
JO
I 1 f 1 r 1 r
3/
вжа
32
gjue.2
33
Ul/
фи&З
3S
36
37
pU9.3
Составитель Ю, Вельских Редактор А. Огар Техред Л.Сердюкова Корректор в. Бутяга
Заказ 2963/51 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фи9
39
L
59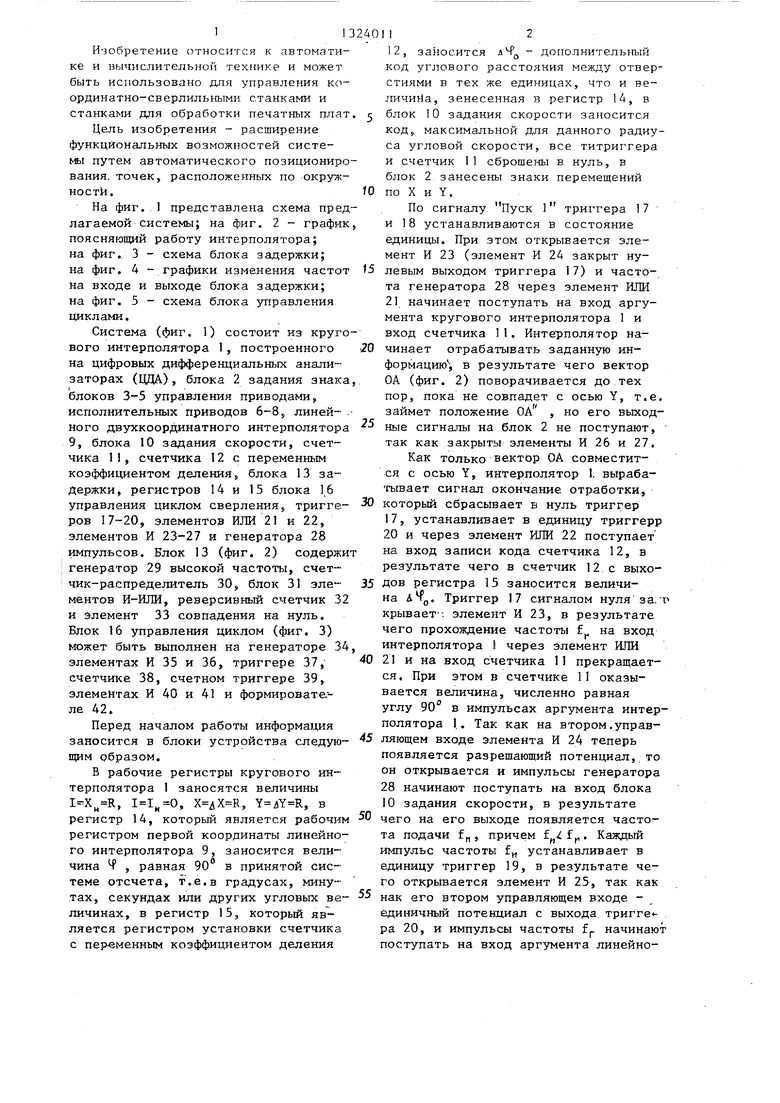
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Устройство для измерения угла в системах числового программного управления | 1987 |
|
SU1495749A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления координат- но-сверлильными станками и станками для обработки печатных плат. Целью изобретения является обеспечение автоматического позиционирования точек, расположенных по окружности на печатной плате. Цель достигается вве- дением генератора 28, блока 16 управления циклом сверления, блока 13 задержки, счетчика 12 с переменньм коэффициентом деления, счетчика 11 импульсов, триггеров 17, 18, 19, 20, элементов ИЛИ 21, 22, элементов И 23-27, линейного интерполятора 9. Система содержит также круговой интерполятор 1, блок 2 задания знака, блоки 3-5 управления приводами, исполнительные приводы 6-8 линейного двухкоординатного интерполятора 9, блок 10 задания скорости. Импульсы аргумента Ч интерполятора (имеющего физический смысл приращений угла поворота радиуса вектора) одновременно подсчитываются счетчиком 11, т.е. получается угловое расстояние между двумя отверстиями. 5 ил. S (Л 27 00 IsD ОкОтр. Пуск2 (риг.1
| Устройство для программногоупРАВлЕНия | 1977 |
|
SU811215A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
