Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления станками и другим оборудованием. Целью изобретения является расширение функциональных возможностей устройства за счет осутествления интерполяции прямых в полярных координатах.
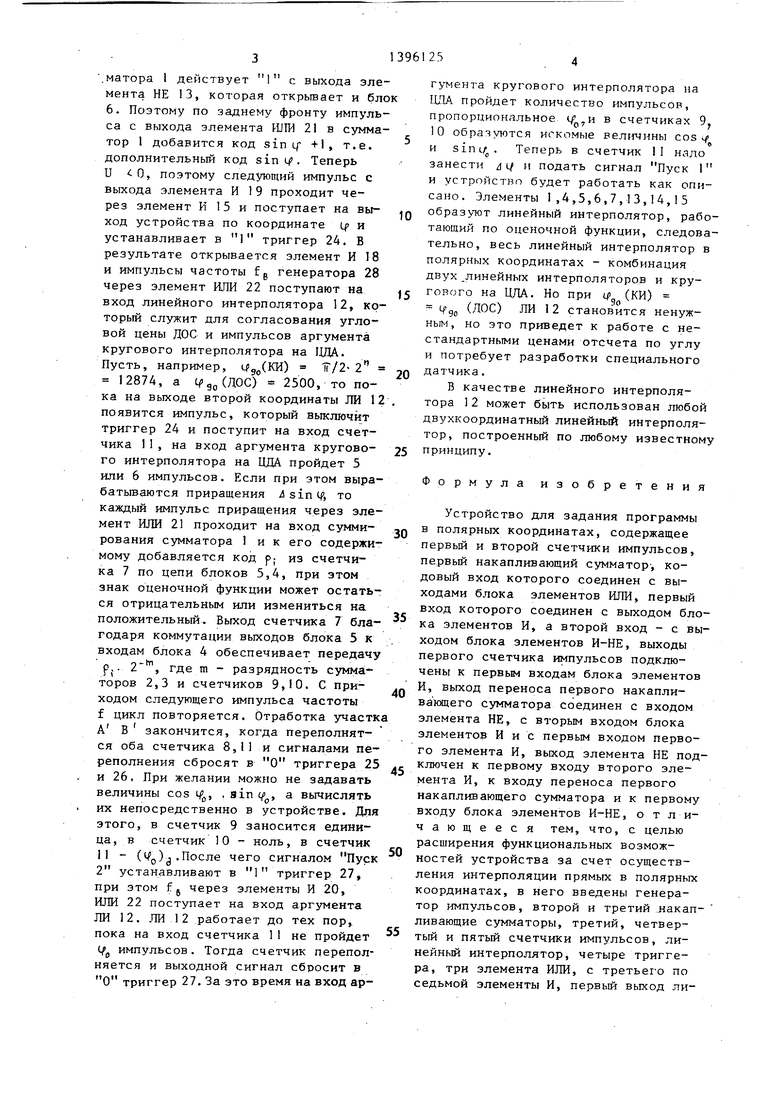
; На фиг.1 изображена схема предла- гЬемого устройства; на фиг.2 - гео- м|Етрическая схема, поясняющая его работу.
; Устройство (фиг.1) состоит из накапливающих сумматоров 1-3, блока 4- элементов ИЛИ, блока 5 элементов Hi, блока 6 элементов И-НЕ, счетчикон 7-11, линейного интерполятора 12, элемента НЕ 13, элементов И 14-20, э|1ементов ИЛИ 21 - 23, триггеров 24- 27, генератора 28 импульсов высокой частоты fg.Bce сумматоры и счетчики устройства переключаются по заднему ф|ронту входного импульса.
; Пусть необходимо провести интер- п|эляцию отрезка А В прямой АВ (фиг.2). Прямая АВ описьюается уравнением вида
а,(1)
.где а - расстояние от точки О (полюса ) до прямой АВ; If - угол поворота радиуса-вектора . Составим оценочную функцию вида
U;. р.-sin Ц).-а,
(2)
Из фиг. 2 видно, что при U 7/О еле- дует делать шаг по р на минус единицу, при и 0 - по if на плюс еди-- ницу.
После шага по р , при U Ч О, р. р; - 1 . Новое значение оценоч ной
Uf,:, ,j (р-- Dsini/.- а - f- -sin 4 - sin Lf -а, или с учетом (2)
и .
и 1 j - sin ц-,
(3)
т.е. после шага по оси необходимо к значен1гк1 оценочной функции прибавить /-sin Ц /
После шага по д, при U i О, Ч ч, - ( + . Подставим значение ц;. +1 в формулу (2) и получим
U;, j, Pi sin (if+ l)-a,,
(4)
sin (if. + 1) sin ц, + и sini/ ,
(5)
тогда
U,-,j, p,. sinM j + p. sin d - или с учетом формулы (2)
5 0 5
0
5
0
5
0
5
Ui,j.,, и,-,,-,, - f.. (6)
Но и sin If при шаге по if на еди-«. ницу может принимать различные значения от нуля до п, в зависимости от угловой цены единицы отсчета, поэтому коррекция оценочной функции может производиться на величину п, р , где п О,1,2,3,...Этот алгоритм и реализует устройство, изображенное на фиг,1.
Перед началом,paбofы информация распределяется следующим образом. Величина р в прямом коде заносится в счетчик 7, величина л р в дополнительном коде - в счетчик. 8, величины cos (р и sin Ц д в прямом кбде - в счетчики 9 и 10, величина л ч в дополнительном коде - в счетчик 11. В . регистры линейного интерполятора 12 заносятся постоянные величины ч - (КИ), т.е. количество импульсов аргумента кругового интерполятора на ЦДА, образованного элементами 2,3, 9,10,16,17, соответствующее 90° и . Cfqo (ДОС), т.е. количество отсчетов датчика обратной связи координаты ( за 90°. Пусть, сумматор 1 в нуле. Сигнал Пуск 1 устанавливает в 1 триггера 25 и 26. На выходе элемента ИЛИ 23 появляется I и открывается элемент И 19 и с его выходов импульсы частоты f поступают на входы элементов И 14,15. Так как U О, то импульс проходит на выход устройства по координате р , вычитает единицу из содержимого счетчика 7, добавляет единицу в счетчик 8 и через элемент ИЛИ 21 поступает на вход суммирования сумматора I, на входы которого, через блок 6 и блок 4 подается обратный код sin с выхода счетчика 10, а на перенос младшего разряда сум.матора 1 действует 1 с выхода элемента НЕ 13, которая открьтает и бло 6. Поэтому по заднему фронту импульса с выхода элемента Ш1И 21 в сумматор 1 добавится код sin Lf +1, т.е. дополнительный код sinM , Теперь и i О, поэтому следуюп1ий импульс с выхода элемента И 19 проходит через элемент К 15 и поступает на вы- ход устройства по координате Cf и устанавливает в 1 триггер 24, В результате открывается элемент И 18 и импульсы частоты fg генератора 28 через элемент ИЛИ 22 поступают на вход линейного интерполятора 12, который служит для согласования угловой цены ДОС и импульсов аргумента кругового интерполятора на ЦДЛ.
Пусть, например, („(КИ )
Г/2- 2
12874, а (ДОС) 2500, то пока на выходе второй координаты ЛИ 12 появится импульс, который выключит триггер 24 и поступит на вход счетчика I1 , на вход аргумента кругово- го интерполятора на ЦДЛ пройдет 5 или 6 импульсов. Если при этом вьфа- батьгоаются приращения /isinift то каждый импульс приращения через элемент ИЛИ 21 проходит на вход сумми- рования сумматора 1 и к его содержимому добавляется код р; из счетчика 7 по цепи блоков 5,4, при этом знак оценочной функции может остаться отрицательным или измениться на положительный. Выход счетчика 7 бла- годаря коммутации выходов блока 5 к входам блока 4 обеспечивает передачу р.. 2, где m - разрядность сумма
торов 2,3 и счетчиков 9,10. С приходом следующего импульса частоты f цикл повторяется. Отработка участк А В закончится, когда переполнятся оба счетчика 8,11 и сигналами переполнения сбросят в О триггера 25 и 26, При желании можно не задавать величины cos ц д, , sin if, а вычислять их непосредственно в устройстве. Для этого, в счетчик 9 заносится единица, в счетчик 10 - ноль, в счетчик 11 - (5)1.После чего сигналом Пуск 2 устанавливают в 1 триггер 27, при этом fJ через элементы И 20, ИЛИ 22 поступает на вход аргумента ЛИ 12. ЛИ 12 работает до тех пор, пока на вход счетчика 11 не пройдет (д импульсов. Тогда счетчик переполняется и выходной сигнал сбросит в О триггер 27. За это время на вход ар
Q г
0
5 «
0
.
0
гумента кругового интерполятора на ЦДЛ Пройдет количество импульсов, пропорциональное в счетчиках 9 10 обрз уются искомые величины cos и sinc/. Теперь в счетчик II надо занести j i/ и подать сигнал Пуск 1 и устройство будет работать как описано. Элементы 1,4,5,6,7,13,14,15 образуют линейный интерполятор, работающий по оценочной функции, следовательно, весь линейный интерполятор в полярных координатах - комбинация двух .линейных интерполяторов и кругового на ЦДЛ. Но при Lf (КИ) (ДОС) ЛИ 12 становится ненуж- ньм, но это приведет к работе с нестандартными ценами отсчета по углу и потребует разработки специального датчика.
В качестве линейного интерполятора 12 может быть использован любой двухкоординатньй линейный интерполятор, построенный по любому известному принципу.
Формула изобретения
Устройство для задания программы в полярных координатах, содержащее первый и второй счетчики импульсов, первый накапливающий сумматор-, кодовый вход которого соединен с выходами блока элементов ИЛИ, первый вход которого соединен с выходом блока элементов И, а второй вход - с выходом блока элементов И-НЕ, выходы первого счетчика импульсов подключены к первьм входам блока элементов И, выход переноса первого накапли- ва ющего сумматора соединен с входом элемента НЕ, с вторым входом блока элементов И и с первым входом первого элемента И, выход элемента НЕ подключен к первому входу второго элемента И, к входу переноса первого накапливающего сумматора и к первому входу блока элементов И-НЕ, о т л и- чающееся тем, что, с целью расширения функциональных возможностей устройства за счет осуществления интерполяции прямых в полярных координатах, в него введены генератор импульсов, второй и третий накапливающие сумматоры, третий, четвертый и пятый счетчики импульсов, линейный интерполятор, четыре триггера, три элемента ИЛИ, с третьего по седьмой элементы И, первый выход ли
нейного интерполятора соединен с суммирующими входами второго и третьего накапливающих сумматоров, с первыми входами третьего и четвертого элементов И, вторые входы которых подключены к выходам переполнения соответственно второг о и третьего, накапливающих сумматоров, а выходы соответственно - к суммирующему и вычитающему входам третьего и четвертого счетчиков импульсов, кодовые Ьыходы которьк соединены с соответствующими входами второго и третьего накапливающих сумматоров, а кодовые Выходы четвертого счетчика импульсов соединены также с вторыми входами блока элементов И-НЕ, информационные входы третьего и четвертого счет- 4ИКОВ импульсов подключены соответ- ственно к первому и второму входам устройства для задания программы, третий и четвертые входы которого соединены соответственно с первым и вторым входами линей 1ого интерполятора, пятый вход - с первым входом пятого элемента И, вход Пуск 1 - с установочным входом первого триггера, вход Пуск 2 -- с установочным Входом второго триггера, второй вход Которого соединен с выходом пятого счетчика импульсов и с вторым входом первого триггера, вькод которого подключен к первому входу первого эле- мента ИЛИ, второй вход которого сое- |Динен с выходом третьего триггера, а Выход - с вторым входом пятого элемента И, выход которого подключен к
0
5
0 5 Q вторым входам первого и второго э. те- ментов И, выходы которых являются соответственно первым и вторым выходами устройства для задания программы, при этом выход второго элемента И соединен с суммирующим входом второго счетчика импульсов, с вьгчитающим входом первого счетчика импульсов и с первым входом, второго элемента Ш1И, второй вход которого подключен к выходу третьего элемента И, а выход - к входу первого накапливающего сумматора, второй выход линейного интерполятора соединен с суммирующим входом пятого счетчика импульсов и с первьм входом четвертого триггера, второй вход которого подключен к выходу, первого элемента И, а выход - к первому входу шестого элемента И, второй вход которого соединен свыходом генератора импульсов и с первым входом седьмого элемента И, второй вход которого подключен к выходу второго триггера, а выход - к первому входу третьего элемента ИЛИ, втог рой вход которого соединен с выходом шестого элемента И, а «выход - с третьим входом линейного интерполятора, выход в.торого счетчика импульсов соединен с первым входом третьего триггера, второй вход которого подключен к входу Пуск устройства для задания программ, шестой и седьмой входы которого соединены соответственно с информационными входами первого и второго счетчиков импуль сов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Устройство для задания угла в системах числового программного управления станками | 1987 |
|
SU1495747A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах управления станками и другим оборудованием. Целью изобретения являетAt &f ся расширение функциональных возможностей устройства за счет осуществления интерполяции прямых в полярных координатах. Устройство для задания программы в полярных координатах содержит накапливающие сумматоры 1,2 и 3, счетчики импульсов 7,8,9,10 и II, блоки элементов И 5, И-НЕ 6, линейный интерполятор 12, триггеры 24, 25, 26 и 27, элементы И 16,17,19,15,14, 20 и 18 и элементы ИЛИ 21,23 и 22. Данное устройство осуществляет интерполяцию прямых в полярных координатах, т.е. реализуется функгхия в виде р sin ц; а, где р и ц-- полярные координаты, а - расстояние от полюса до интерполируемой прямой. 2 ил. с (1 с ОС г о: ND сл
л
..
е в
| Михеев Ю.Е., Сосонкин В.Л | |||
| Системы автоматического управления станками | |||
| М.: Машиностроение, 1978, с.85 | |||
| Там же, с.80, рис.73 |
