11317399
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления ко- ординатно-сверлильными станками и станками для обработки печатных плат.
Целью изобретения является обеспечение режима автоматического позиционирования точек, расположеннь{х по окружности.
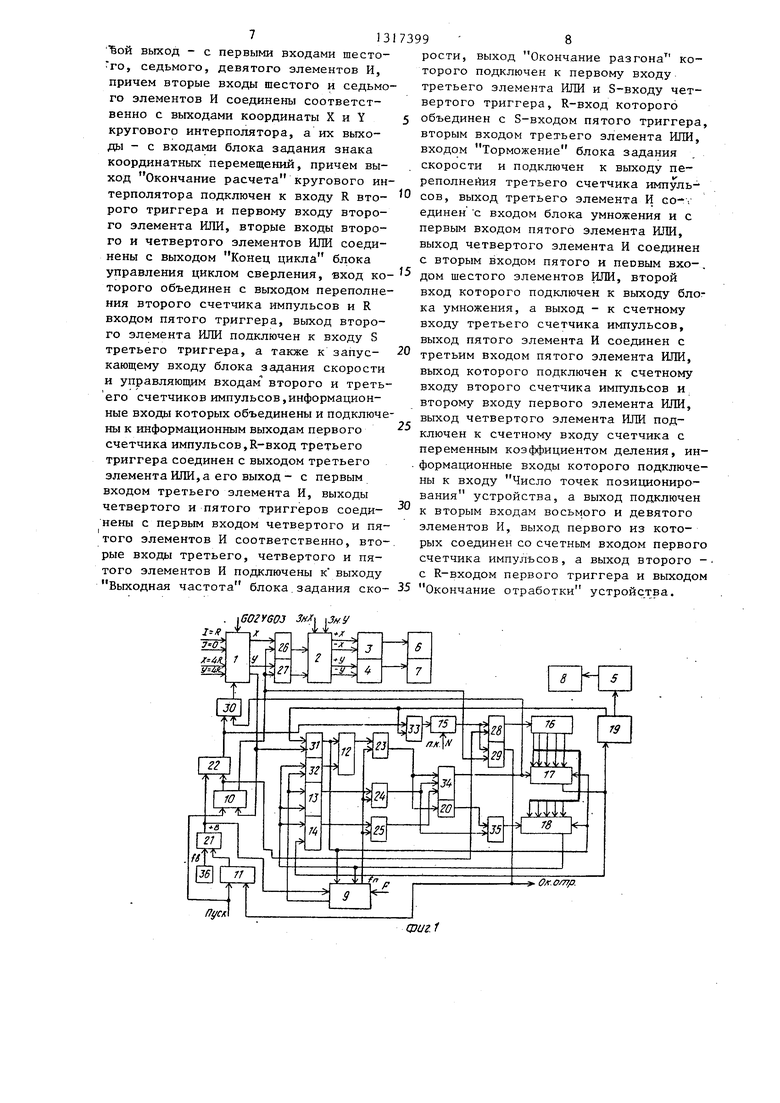
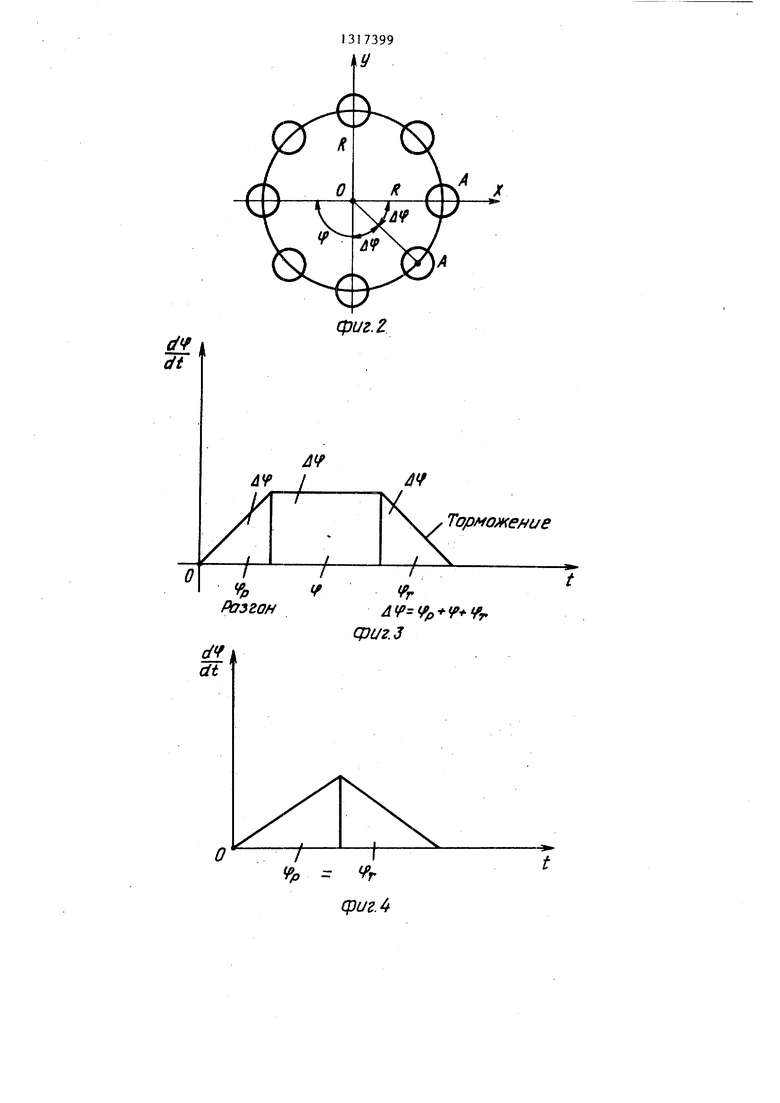
На фиг. 1 показана схема предлагаемого устройства для программного управления; на фиг. 2-4 - диаграммы, поясняющие работу устройства; на фиг. 5 - вариант выполнения блока управления циклом.
Устройство для программного управления (фиг. 1) состоит из кругового интерполятора 1, блока 2 задания знака координатных перемещений, первого 3, второго 4, третьего 5 блоков управления координатными приводами, первого 6, второго 7, третьего 8 координатных приводов, блока 9 задания скорости, второго 10, первого 11,
кий, код подачи -F заносится в блок 9. задания скорости, код числа N отверстий заносится в счетчик 15 импульсов с перементлм коэффициентом деле- 5 ния, остальные счетчики и триггера сбрасываются в ноль.
Сигнал Спуск устанавливает в единицу первый II и второй 10 триг Q гера. При этом открываются первый 21 и второй 22 элементы И и частота f генератора 36 импульсов через эти элементы поступает на входы первого 30 и четвертого 33 элементов ИЛИ. С выj ход первого элемента ИЛИ 30 частота fJ поступает на вход аргумента кругового интерполятора 1, а с выхода четвертого элемента ИЛИ 33 - на счетный вход счетчика 15 импульсов с пе2Q ременным коэф шциентом деления, сигнал переполнения которого через восьмой элемент И 28, открытый единичным потенциалом с единичного выхода
скорости полную окружность радиуса R, но при этом его выходные сигналы
30
второго триггера 10, поступает на
третьего 12, четвертого 13, пятого 14 5 счетный вход первого счетчика 16 им- триггеров, счетчика 15 импульсов с пульсов. Круговой интерполятор I от- переменным коэффициентом, первого 16, рабатывает на максимально возможной второго 1-7, третьего 18 счетчиков импульсов, блока 19 управления циклом сверления, блока 20 умножения, первого 21, второго 22, третьего 23, четвертого 24, пятого 25, шестого 26, седьмого 27, восьмого 28 и девятого 29 элементов И, первого 30, второго 31 , третьего 32, четвертого 33, пятого 34, шестого 35 элементов РШИ, генератора импульсов 36.
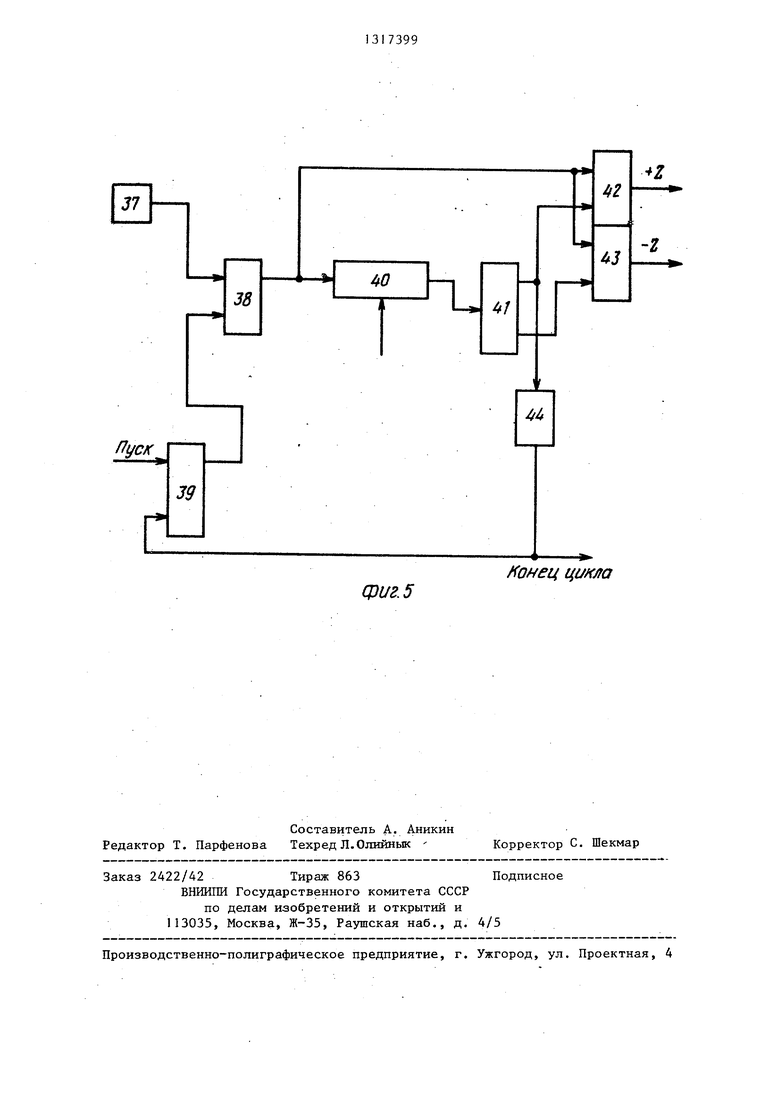
Вариант выполнения блока 19 управления циклом сверления (фиг. 5) состоит из генератора 37 импульсов, элемента И 38, триггера 39, счетчика 40 импульсов, счетного триггера 41, элементов И 42 и 43, формирователя 44 сигнала Конец цикла.
Блок 9 задания скорости особенное тей не имеет и может быть выполнен по любой известной схеме.
Перед началом работы информация распределяется по блокам устройства следуюпщм образом. Величины I Х Y 0,Х ЛХ 4R,Y dY 4R (где R - радиус окружности позиционирования ) заносятся в круговой интерполятор 1, а значение G02 или G03 определяет направление движения по интерполируемой окружности. Знаки координат X и Y заносятся в блок 2 задания знака координатных перемещепо координатам X и Y не проходят в привода, так как шестой 26 и седьмой 27 элементы И закрыты нулевым потенциалом с выхода нулевого плеча второго триггера 10. Так продолжаетj ся до тех пор, пока радиус-вектор ОА (фиг. 2) не совершит полный оборот, при этом на вход счетчика 15 импульсов поступает число импульсов, соответствующее 360, а в первом счетчи40 ке 16 импульсов окажется число i if в обратном коде, соответствующее угловому расстоянию между любыми отверстиями из заданного числа N в единицах приращения угла аргумента кру гового интерполятора. Как только полный оборот закончен, круговой интерполятор 1 вырабатывает сигнал Окончание расчета, которьй сбрасывает второй триггер 10 в ноль и че50 рез второй элемент ИЛИ 31 переписывает величину 1 с выхода счетчика 16 импульсов во второй 17 и третий 18 счетчики импульсов, включает разгон в блоке 9 задания скорости и уста55 навливает в единицу третий триггер 12 На выходе Выходная частота блока 9 задания скорости появляется частота f, которая начинает линейно возрастать. Она поступает на вторые входы
кий, код подачи -F заносится в блок 9. задания скорости, код числа N отверстий заносится в счетчик 15 импульсов с перементлм коэффициентом деле- 5 ния, остальные счетчики и триггера сбрасываются в ноль.
Сигнал Спуск устанавливает в единицу первый II и второй 10 триг Q гера. При этом открываются первый 21 и второй 22 элементы И и частота f генератора 36 импульсов через эти элементы поступает на входы первого 3 и четвертого 33 элементов ИЛИ. С выj ход первого элемента ИЛИ 30 частота fJ поступает на вход аргумента кругового интерполятора 1, а с выхода четвертого элемента ИЛИ 33 - на счетный вход счетчика 15 импульсов с пе2Q ременным коэф шциентом деления, сигнал переполнения которого через восьмой элемент И 28, открытый единичным потенциалом с единичного выхода
скорости полную окружность радиуса R, но при этом его выходные сигналы
счетный вход первого счетчика 16 им- пульсов. Круговой интерполятор I от- рабатывает на максимально возможной
30
5 счетный вход первого счетчика 16 им- пульсов. Круговой интерполятор I от- рабатывает на максимально возможной
,
по координатам X и Y не проходят в привода, так как шестой 26 и седьмой 27 элементы И закрыты нулевым потенциалом с выхода нулевого плеча второго триггера 10. Так продолжаетj ся до тех пор, пока радиус-вектор ОА (фиг. 2) не совершит полный оборот, при этом на вход счетчика 15 импульсов поступает число импульсов, соответствующее 360, а в первом счетчи40 ке 16 импульсов окажется число i if в обратном коде, соответствующее угловому расстоянию между любыми отверстиями из заданного числа N в единицах приращения угла аргумента кру гового интерполятора. Как только полный оборот закончен, круговой интерполятор 1 вырабатывает сигнал Окончание расчета, которьй сбрасывает второй триггер 10 в ноль и че50 рез второй элемент ИЛИ 31 переписывает величину 1 с выхода счетчика 16 импульсов во второй 17 и третий 18 счетчики импульсов, включает разгон в блоке 9 задания скорости и уста55 навливает в единицу третий триггер 12 На выходе Выходная частота блока 9 задания скорости появляется частота f, которая начинает линейно возрастать. Она поступает на вторые входы
313
третьего 23, четвертого 24 и пятого 25, элементов И, но так как уровень логической единицы имеется только на выходе третьего триггера 12, (четвертый 13 и пятый 14 триггера в нуле), то эта частота проходит через третий элемент И 23 и пятый элемент ИЛИ 34 на счетный вход второго счетчика 17 импульсов, а череэ первьй элемент ИЛИ 30 - на вход аргумента кругового интерполятора 1, а через блок 20 умножения.и шестой элемент ИЛИ 35 - на счетный вход третьего счетчика 18 импульсов. На каждый входной импульс блок 20 умножения формирует два импульса, на выходе.
Круговой интерполятор 1 вновь начинает отрабатывать заданную окружность, при этом его выходные сигналы через шестой 26 и седьмой 27 элементы И, открытые единичным сигналом с нулевого выхода второго триггера 10, поступают на входы блока 2 задания знака координатных перемещений, а с его выхода по соответствующим каналам - на вход первого 3 и второго 4 блоков управления приводами, с выхода которых в преобразованном виде поступают на входы первого 6 и второго 7 приводов,
Пока частота f на выходе блока 9 задания скорости возрастает увеличивается и скорость движения по дуге радиуса R точки А (фиг. 2 и 3). Так продолжается до тех пор, пока частота на выходе блока 9 задания скорости не окажется равной заданному код подачи F. При этом на выходе Окончание разгона этого блока вырабатывается сигнал, который поступает через третий элемент ИЛИ 32 на R-вход триггера 12 и сбрасывает его в ноль, а также устанавливает в единицу четвертый триггер 13. В результате открывается четвертый элемент И 24, а третий элемент И 23 закрывается. Теперь постоянная частота f, с выхода блока 9 задания скорости проходит через четвертьй элемент И 24 и шестой элемент ИЛИ 35 на счетный вход третьего счетчика 18 импульсов, через пятьй элемент ИЛИ 34 - на счетный вход второго счетчика 17 импульсов , и через первый элемент ИЛИ 30 - на вход аргумента кругового интерполятора. Круговой интерполятор 1 продолжает отрабатывать дугу на постоянной скорости. Так продолжается до
3994
тех пор, пока не переполнится третий счетчик 18 импульсов и сигнал на его выходе переполнения включает торможение в блоке 9 задания скорости, подтверждает через третий элемент ИЛИ 32 нулевое состояние третьего триггера 12, сбрасывает в ноль четвертый триггер 13 и устанавливает в едини- -цу пятый триггер 14.
o
Частота f на выходе блока- 9 задания скорости начинает линейнр уменьшаться и поступать через пятый элемент И 25 и питый элемент
2 ИЛИ 34 на счетный вход второго счетчика 17 импульсов и через первый элемент ИЛИ 30 - на вход аргумента кругового интерполятора 1. Круговой интерполятор продолжает отрабатывать
Q дугу с замедлением скорости. Так продолжается до тех пор, пока не переполнится второй счетчик I7 импульсов и к этому моменту f ; 0. Сигнал на выходе переполнения этого счетчика
5 сбрасывает в ноль пятый триггер 14, и пятьм элемент И 25 закрывается. Движение по дуге прекращается. Одновременно тот же сигнал запускает блок 19 управления циклом сверления. Блок 19
0 управления циклом сверления в- зависимости от конструкции координаты Z конкретного станка или включает привод однооборотной му фты, которая обеспечивает один ход сверла . вниз-вверх или инициирует соответствующие последовательности управляющих сигналов, обеспечивающих с помощью третьего блока 5 управления приводом и третьего привода 8 аналоQ гичные движения +4Z и -л2, после чего блок 19 управления циклом сверления вьфабатывает сигнал Конец цикла, который поступает на входы второго 31 и четвертого 33 элементов ИЛИ. Этот
сигнал, пройдя через четвертый элемент ИЛИ 33, подсчитывается счетчиком 15 импульсов с переменным коэффициентом деления, а, пройдя через второй элемент ИЛИ 31, запускает
Q цикл перемещения к следующему отверстию. Так продолжается до тех пор, пока не будет просверлено последнее отверстие, при этом переполняется счетчик 15 импульсов с переменным ко эффициентом деления и его выходной сигнал, пройдя через девятый элемент И 29, открытый потенциалом с нулевого выхода второго триггера 10, сбросит в ноль первьй триггер 11,
51
выключая тем самым первый элемент И 2 и поступит на выход Окончание отработки системы. Прохождение частоты генератора 36 импульсов на блоке устройства прекращается. В том случае, если отверстий много или мал радиус
окружностей, расстояние между отверстиями мало и имеет место условие (Ур, где tfp - участок разгона до заданной скорости (торможение от заданной скорости), то блок 9 задания скорости не вырабатывает сигнал Окончание разгона, а сразу приходи сигнал переполнения третьего счетчи. ка 18 импульсов, поэтому график выходной частоты блока 9 задания скорости движения точки А по дуге имеет вид, изображенньй на фиг. 4,
Блок 19 управления циклом сверления (вариант) работает следующим образом.
Сигнал Пуск с выхода переполнения счетчика 17 импульсов устанавливает в единицу триггер 39. Единичный сигнал с выхода этого триггера открывает элемент И 38, и частота генератора импульсов 37 начинает поступать на вход счетчика 40, имеющего коэффициент пересчета, равный глубине сверления Z, а также на входы элементов. И 43 и 42. Так как счетный триггер 41 предварительно был установлен в единицу, тр сигналом с его единичного выхода открыт элемент И 42 поэтому импульсы частоты поступают в третий блок 5 управления приводом По каналу +Z. Так продолжается до тех пор, пока на вход счеТ-чика 40 импульсов и, следовательно, на выход по каналу +Z, не пройдет Z импульсов, при этом счетчик 40 переполняется, и его сигнал переполнения переключает счетньй триггер 41 в состояние нуля. Счетчик 40 имцульсов продолжает вести отсчет, но теперь открыт элемент И 43, и импульсы частоты поступают в третий блок 5 управления приводом по каналу -Z. Когда по каналу -Z пройдет л Z импульсов, счетчик 40 импульсов переполняется второй раз, счетный триггер 41 переключается в единицу, а формирователь 44 из положительного перепада формирует импульс, который сбрасывает в ноль триггер 39, выключая тем самым элемент И 38, и поступает на выход блока как сигнал Конец цикла
9 . 6
Преимуществом предлагаемого устройства для программного управления заключается в обеспечении режима автоматического позиционирования точек
обработки, расположенных по окружности (осуществление .автоматического разгона и торможения при движении по окружности), при максимальном быстродействии, обеспечиваемом круговым интерполятором на цифровых дифференциальных анализаторах, а также в значительном упрощении программирования процесса обработки деталей и сокращении объема запоминающих устройств на программу.
Формула изобретения
20 Устройство для программного управления , содержащее круговой интерполятор, последовательно соединен- ньш блок задания знака координатных перемещений, первьш и второй блоки
25 управления приводами, первый и второй координатные приводы, а та,кже блок задания скорости, о т л и ч а - ю щ е е с я тем, что, с целью обеспечения режима автоматического пози30 ционирования точек, расположенных по окружности, дополнительно введены последовательно соединенные блок управления циклом сверления, третий блок управления координатным приводом и третий координатный привод, а также первый, второй, третий, четвертый и пятый триггеры, счетчик импульсов е переменным коэффициентом деления, первый, второй и третий счетчики им40 пульсов, блок умножения, с первого по девятый элементы И, с первого по шестой элементы ИЛИ и генератор импульсов, причем выход первого элемента ИЛИ соединен с входом аргумента
45 кругового интерполятора, входы S первого и второго триггеров объединены и подключены к входу Пуск устройства, выход генератора импульсов подключен к первому входу первого эле50 мента И, второй вход которого соединен с выходом первого триггера, а входы - с входом задающей частоты блока задания скорости и с первым входом второго элемента И, выход ко55 торого подключен к первым входам первого и четвертого элементов ИЛИ, еди- яичный выход второго триггера соединен с вторым входом второго и первым входом восьмого элементов И, а нуле35 /
713
выход - с первыми входами шесто- го, седьмого, девятого элементов И, причем вторые входы шестого и седьмого элементов И соединены соответственно с выходами координаты X и Y кругового интерполятора, а их выходы - с входами блока задания знака координатных перемещений, причем выход Окончание расчета кругового интерполятора подключен к входу R второго триггера и первому входу второго элемента ШШ, вторые входы второго и четвертого элементов ИЛИ соединены с выходом Конец цикла блока управления циклом сверления, вход которого объединен с выходом переполнения второго счетчика импульсов и R входом пятого триггера, выход второго элемента ИЛИ подключен к входу S третьего триггера, а также к запускающему входу блока задания скорости и управляющим входам второго и треть- его счетчиков импульсов,информационные входы которых объединены и подключены к информационным выходам первого счетчика импульсов,R-вход третьего триггера соединен с выходом третьего элемента ИЛИ, а его выход - с первым входом третьего элемента И, выходы четвертого и пятого триггеров соединены с первым входом четвертого и пятого элементов И соответственно, вторые входы третьего, четвертого и пятого элементов И подключены к выходу Выходная частота блока.задания ско. БогУвоз
7
i
Ш
7399 -8
рости, выход Окончание разгона которого подключен к первому входу третьего элемента ИЛИ и S-входу четвертого триггера, R-вход которого
5 объединен с S-входом пятого триггера, вторым входом третьего элемента ИЛИ, входом Торможение блока задания скорости и подключен к выходу пе- реполнейия третьего счетчика импульсов, выход третьего элемента И co-v единен с входом блока умножения и с первым входом пятого элемента ИЛИ, выход четвертого элемента И соединен с вторым входом пятого и пеовым вхо-.
5 дом шестого элементов ИЛИ, второй вход которого подключен к выходу блог ка умножения, а выход - к счетному входу третьего счетчика импульсов, выход пятого элемента И соединен с
третьим входом пятого элемента ИЛИ, выход которого подключен к счетному входу второго счетчика импульсов и второму входу первого элемента ИЛИ, выход четвертого элемента ИЛИ подключен к счетному входу счетчика с переменным коэффициентом деления, информационные входы которого подключены к входу Число точек позиционирования устройства, а выход подключен к вторым входам восьмого и девятого элементов И, выход первого из которых соединен со счетным входом первого счетчика импульсов, а выход второго - с R-входом первого триггера и выходом
35 Окончание отработки устройства.
25
30
Фиг.1
dt
фиг.г
V
J /
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления координатно-сверлильными станками и станками для обработки печатных плат. Целью изобретения является обеспечение режима автоматического позиционирования точек обработки, расположенных по окружности. Устрой ство состоит из кругового интерполятора, выполненного на цифровых дифференциальных анализаторах, блока задания скорости, блока задания знака координатных перемещений, блоков управления координатными приводами, координатных приводов, счетчика с переменным коэффициентом деления, трех счетчиков импульсов, блока управления циклом сверлений, пяти триггеров, элементов И,элементов ИЛИ, блока умножения и генератора импульсов. Преимуществом предлагаемого устройства перед аналогичными является обеспечение режима автоматического позиционирования точек, расположенных по окружности, при максимальном быстродействии, обеспечиваемом круговым интерполятором на цифровых дифференциальных анализаторах, при значительном упрощении программирования процесса обработки детали и сокращении объема запоминающих устройств на программу. 5 ил. (Л САЭ СО QD СО
ери г. 4
из
y
38
0
U1
фиг. 5
цик/fa
| Ранцевый вентиляторный опыливатель | 1948 |
|
SU76003A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления разгоном и торможением исполнительного двигателя станка | 1981 |
|
SU1062646A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
