Изобретение относится к машиностроительной гидравлике и может быть использовано в подъемно-транспортных механизмах для вывешивания и горизонтирования грузовых платформ, расположенных на неподвижных площадках.
Цель изобретения - повышение надежности.
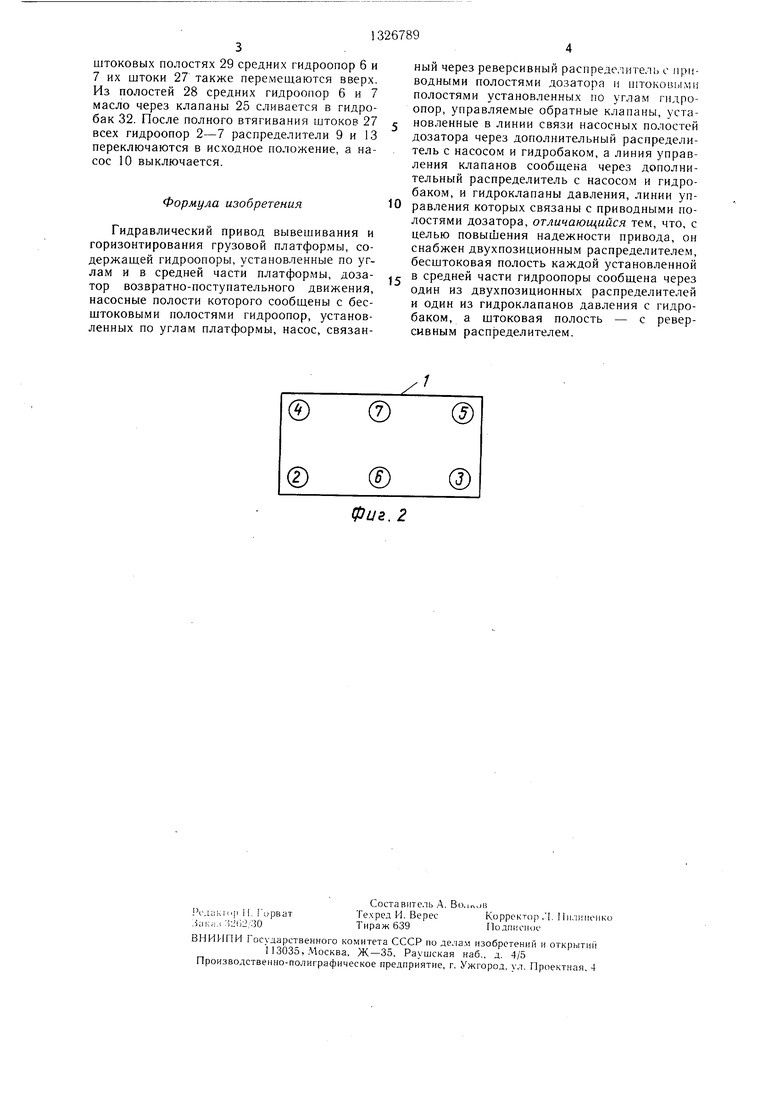
На фиг. 1 представлена принципиальная схема привода; на фиг. 2 - расположение гидроопор на платформе.
Гидравлический привод содержит размещенные на платформе 1 угловые гидроопоры 2-5, средние гидроопоры 6 и 7, дозатор 8, основной реверсивный распределитель 9, насис 10, управляемые обратные клапаны П и 12, дополнительный распределитель 13. Гидролинии 14 и 15 сообщены с управляемыми обратными клапанами (не показаны) гидроопор 4 и 5. Перепускной клапан 16 настроен на величину давления, несколько превыщающую величину, потребную для холостого выпуска. Дроссель 17 предназначен для ограничения скорости опускания платформы 1. Гидролинии 18 и 19 подключены к дозатору 8, сообщенному через золотник 20 и 21 горизонтирования
10
15
20
Из штоковых полостей 29 масло через распределитель 9 сливается в гидробак 32. В процессе вывешивания и подъема платформы 1 движение гидроопор 2-7 происходит синхронно.
Горизонтирование платформы 1 осуществляется с помощью золотников 20 и 21. Например, при горизонтировании платформы 1 относительно оси, проходящей через гидроопоры 3 и 5, золотник 21 переключается в правую позицию и масло из соответствующих полостей 30 дозатора 8 поступает в гидробак 32. Гидроопоры 2, 4 и 6, 7 продолжают движение вверх. По достижении заданной точности углового положения платформы 1 золотники 20 и 21 переключаются в левую позицию. После подъема платформы 1 на заданную высоту нагрузка от веса платформы 1 воспринимается винтами 34 всех щести гидроопор 2-7.
Перед опусканием платформы 1 после пуска насоса 10 основной распределитель 9 и распределитель 24 на некоторое время переключаются соответственно в левую и правую позиции для разгрузки винтов 34, после чего распределитель 9 переключается в правое положение, а распределитель 24 -
гидроопорами 2 и 3. Привод содержит 25 g левое. При этом масло от насоса 10 потакже регулируемые дроссели 22 и 23, двух- позиционный распределитель 24, гидроклапан 25 давления. Порщни 26 со щтоками 27 установлены с образованием бесштоковых полостей 28 и штоковых полостей 29. Насосные полости 30 дозатора 8 сообщены с полостями 28, приводные полости 31 через распределитель 9 - с насосом 10 и гидробаком 32 и с управляющей полостью 33 гидроклапана 25. Гидроопоры 2-7 имеют винты 34.
Привод работает следующим образом.
После пуска насоса 10 распределитель 13 и распределитель 24 переключаются в правую позицию (по чертежу). Масло от насоса 10 через распределитель 13, полости 30
35
ступает в штоковые полости 29 всех шести гидроопор 2-7. Под действием внешней нагрузки и давления масла в штоковых полостях 29 платформа 1 движется вниз. Из полостей 28 угловых гидроопор 2-5 масло вытесняется в полости 30 дозатора 8. Из полостей 31 дозатора 8 масло через дроссель 17 и распределитель 9 поступает в гидробак 32. Скорость опускания платформы 1 определяется настройкой дросселя 17. Из полостей 28 гидроопор 6 и 7 масло через клапан 25 вытесняется в гидробак 32. Величина давления масла в полостях 28 определяется клапанами 25, при соответствующей настройке которых обеспечивается равномерное распределение массовой нагрузки на все
дозатора 8 и золотники 20 и 21 поступает в дО гидроопоры 2-7. В процессе опускания платиолости 28 угловых гидроопор 2-5, осуществляя движение их поршней 26 вниз. Из штоковых полостей 29 масло через распределитель 9 сливается в гидробак 32. Когда штоки 27 всех гидроопор 2-7 коснутся грунта, давление повышается до величины настройки клапана 16.
При срабатывании клапана 16 подается сигнал на переключение распределителя 13 в среднее положение. Г1ри вывешивании платформы 1 с подвесок и ее подъеме распределитель 9 занимает левую позицию. Масло от насоса 10 поступает в левые полости 31 дозатора 8, из полостей 30 которого масло через золотники 20 и 21 вытесняется в полости 28 угловых гидроопор 2-5. .Одновременно масло от насоса 10 поступает также в полости 28 средних гидроопор 6 и 7, перемещая их вверх.
45
формы 1 движение средних гидроопор 6 и 7 происходит синхронно с движением угловых. Масло из полостей 28 угловых гидроопор 2-5 поступает в полости 30 дозатора 8 как вследствие поворота платформы 1, так и из-за начала убирания щто- ков 27 гидроопор 2-5, находяп ихся у края платформы 1, закончившего движение. После подхода дозатора 8 в исходное положение распределитель 13 переключается в левую позицию и масло от насоса 10 через распределитель 13 подается к клапанам 11 и 12, которые открываются, соединяя с гидробаком 32 полости 30 дозатора 8 и полости 28 гидроопор 2-5. Под действием давления масла в полостях 29 гидроопор 2-5 их 55 штоки 27 перемешаются вверх. Из полостей 28 гидроопор 2-5 масло через распределитель 13 сливается в гидробак 32. Одновременно под действием давления масла в
50
0
5
0
Из штоковых полостей 29 масло через распределитель 9 сливается в гидробак 32. В процессе вывешивания и подъема платформы 1 движение гидроопор 2-7 происходит синхронно.
Горизонтирование платформы 1 осуществляется с помощью золотников 20 и 21. Например, при горизонтировании платформы 1 относительно оси, проходящей через гидроопоры 3 и 5, золотник 21 переключается в правую позицию и масло из соответствующих полостей 30 дозатора 8 поступает в гидробак 32. Гидроопоры 2, 4 и 6, 7 продолжают движение вверх. По достижении заданной точности углового положения платформы 1 золотники 20 и 21 переключаются в левую позицию. После подъема платформы 1 на заданную высоту нагрузка от веса платформы 1 воспринимается винтами 34 всех щести гидроопор 2-7.
Перед опусканием платформы 1 после пуска насоса 10 основной распределитель 9 и распределитель 24 на некоторое время переключаются соответственно в левую и правую позиции для разгрузки винтов 34, после чего распределитель 9 переключается в правое положение, а распределитель 24 -
5 g левое. При этом масло от насоса 10 поg левое. При этом масло от насоса 10 по
ступает в штоковые полости 29 всех шести гидроопор 2-7. Под действием внешней нагрузки и давления масла в штоковых полостях 29 платформа 1 движется вниз. Из полостей 28 угловых гидроопор 2-5 масло вытесняется в полости 30 дозатора 8. Из полостей 31 дозатора 8 масло через дроссель 17 и распределитель 9 поступает в гидробак 32. Скорость опускания платформы 1 определяется настройкой дросселя 17. Из полостей 28 гидроопор 6 и 7 масло через клапан 25 вытесняется в гидробак 32. Величина давления масла в полостях 28 определяется клапанами 25, при соответствующей настройке которых обеспечивается равномерное распределение массовой нагрузки на все
гидроопоры 2-7. В процессе опускания плат5
формы 1 движение средних гидроопор 6 и 7 происходит синхронно с движением угловых. Масло из полостей 28 угловых гидроопор 2-5 поступает в полости 30 дозатора 8 как вследствие поворота платформы 1, так и из-за начала убирания щто- ков 27 гидроопор 2-5, находяп ихся у края платформы 1, закончившего движение. После подхода дозатора 8 в исходное положение распределитель 13 переключается в левую позицию и масло от насоса 10 через распределитель 13 подается к клапанам 11 и 12, которые открываются, соединяя с гидробаком 32 полости 30 дозатора 8 и полости 28 гидроопор 2-5. Под действием давления масла в полостях 29 гидроопор 2-5 их 5 штоки 27 перемешаются вверх. Из полостей 28 гидроопор 2-5 масло через распределитель 13 сливается в гидробак 32. Одновременно под действием давления масла в
0
штоковых полостях 29 средних гидроопор б и 7 их штоки 27 также перемещаются вверх. Из полостей 28 средних гидроопор 6 и 7 масло через клапаны 25 сливается в гидро- бак 32. После полного втягивания штоков 27 всех гидроопор 2-7 распределители 9 и 13 переключаются в исходное положение, а насос 10 выключается.
Формула изобретения
Гидравлический привод вывешивания и горизонтироваиия грузовой платформы, со- держаш,ей гидроопоры, установленные по углам и в средней части платформы, дозатор возвратно-поступательного движения, насосные полости которого сообщены с бес- штоковыми полостями гидроопор, установленных по углам платформы, насос, связанный через реверсивный распределитель с приводными полостя.ми дозатора и iiiTOKOBi)iMH полостями установленных по углам гидроопор, управляемые обратные клапаны, установленные в линии связи насосных полостей дозатора через дополнительный распределитель с насосом и гидробаком, а линия управления клапанов сообщена через дополнительный распределитель с насосом и гидробаком, и гидроклапаны давления, линии управления которых связаны с приводными полостями дозатора, отличающийся тем, что, с целью повышения надежности привода, он снабжен двухпозиционным распределителем, бесштоковая полость каждой установленной е В Средней части гидроопоры сообщена через один из двухпозиционных распределителей и один из гидроклапанов давления с гидробаком, а щтоковая полость - с реверсивным распределителем.
Фиг. 2
Изобретение м. б. использовано в подъемно-транспортных механизмах. Цель изобретения - повышение надежности. Для этого бесштоковая полость каждой установленной в средней части платформы гидроопоры 6 сообш.ена со сливом через двух- позиционный распределитель 24 и гидроклапан 25 давления, а штоковая полость со- обшена с реверсивным распределителем 9. Настройка клапанов 25 определяет давление масла в бесштоковых полостях гидроопор и обеспечивает равномерное распределение массовой нагрузки на все гидроопоры. При опускании платформы 1 движение средних гидроопор происходит синхронно с движением угловых. 2 ил. с сл со 05 00 со
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU769120A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
