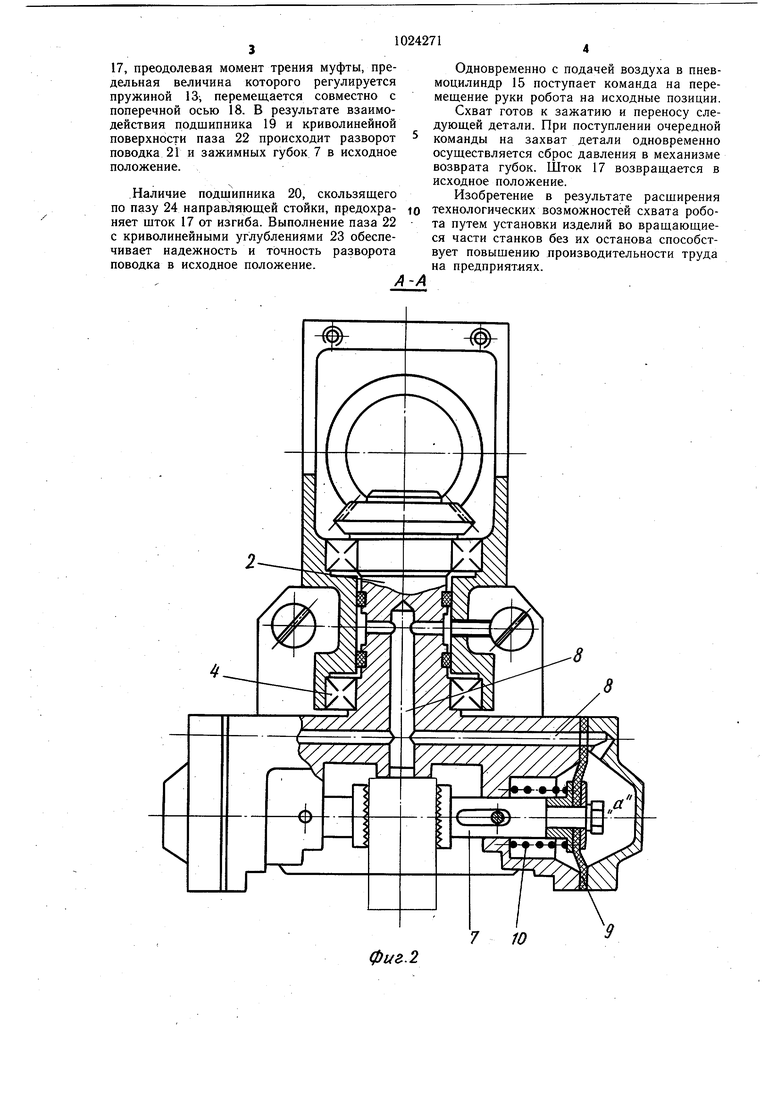
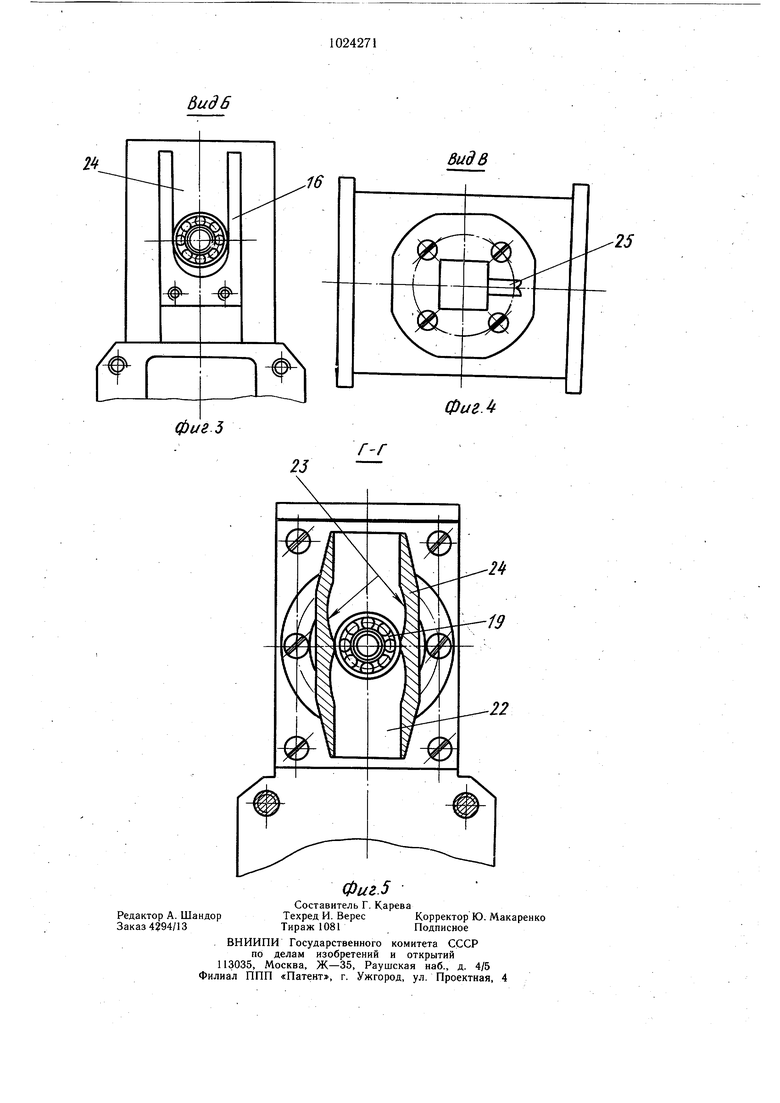
Изобретение относится к машиностроению, преимущественно к промышленным роботам и манипуляторам, и предназначено для автоматической установки деталей произвольной конфигурации во вращающиеся части станков без их останова, например в патрон токарного станка. Известен схват промышленного робота для установки изделий во втулки или патроны металлообрабатывающих станков, содержащий корпус, установленные в нем губки с приводом их перемещения и механизм досылки деталей до упора в патроне станка. С помощью этого схвата можно вставлять заранее сориентированные изделия в неподвижные части станков 1. Однако схват нельзя применить в том случае, когда необходимо установить деталь в патрон без его предварительной остановки, что значительно -снижает, технологические возможности схвата и производительность труда. Кроме того, схват имеет значительные габаритные размеры. Целью изобретения является расширение технологических возможностей за счет установки изделий во вращающиеся части станков без их останова, например, в патроны токарных станков. Поставленная цель достигается .тем, что схват робота снабжен расположенными в корпусе и кинематически связанными между собой валами, поводком с пазом и механизмом разворота зажимных губок в исходное положение, причем на конце одного вала смонтированы зажимные губки с приводом перемещения, а на конце - другого вала через поводок с пазом - механизм разворота зажимных губок в исходное положение. Кроме того, схват снабжен направляющей стойкой, а механизм разворота зажимных губок в исходное положение содержит пневмоцилиндр, на штоке которого закреплена поперечная ось, входящая одним концом в паз поводка, а другим - в паз направляющей стойки, жестко связанной с пневмоцилиндром. С целью повыщения надежности и точности разворота зажимных губок в исходное положение, в пазу поводка выполнены криволинейные углубления симметрично относительно оси поводка. На фиг. 1 изображен схват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1. Схват содержит корпус 1 с расположенными в нем валами 2 и 3, установленными в подшипниках 4 и соединенными между собой коническими шестернями 5 и 6 с передаточным числом i l. На валу 2 смонтированы зажимные губки 7, которые перемещаются приводом, включающим систему трубопроводов 8 для подвода сжатого воздуха, диафрагму 9 и пружину 10. На валу 3 установлена муфта предельного момента с левой полумуфтой 11, жестко закрепленной на валу 3, и с правой полумуфтой 12, которая имеет возможность осевого перемещения относительно корпуса 1, а также с пружиной 13. В зажимных губках находится деталь 14. Механизм разворота зажимных губок в исходное положение содержит жестко смонтированный в корпусе пневмоцилиндр 15, на котором укреплена направляющая стойка 16. Шток 17 пневмоцилиндра 15 жестко связан с поперечной осью 18, снабженной на .обоих концах подшипниками 19 и 20. На валу 13 насажен поводок 21, выполненный с пазом 22, причем паз имеет криволинейные углубления 23, симметричные относительно горизонтальной оси поводка. Направляющая стойка имеет продольный паз 24. Подача сжатого воздуха в пневмоцилиндр 15 механизма возврата осуществляется от системы по трубопроводу 25. Схват работает следующим образом. На схват руки подается команда на зажатие детали 14, сориентированной определен(ым образом. Зажатие осуществляется подачей энергоносителя по трубопроводам 8 в полость а диафрагмы. Зажатая деталь переносится рукой со схватом (рука не показана) к вращающемуся патрону станка и вступает своим торцом с ним в контакт, при этом наблюдается несовмещение конфигураций торца и отверстия патрона. В этот момент в работу вступает муфта предельного момента, препятствующая вращению детали. В результате трения, созданного муфтой, происходит угловое смещение торца детали относительно отверстия в патроне и, поскольку схват с деталью находится под действием усилия, создаваемого приводом перемещения руки, при совпадении конфигурации торца детали и отверстия в патроне деталь входит в патрон на нужную глубину до упора в датчик, зажимается по команде от датчика и продолжает вращаться вместе с патроном. После этого поступает команда на освобождение детали из губок схвата, а давление на диафрагму 9 снимается. Под действием пружины 10 зажимные губки 7 освобождают деталь и при своей остановке после вращения занимают произвольное, отличное от исходного, положение, относительно которого заранее сориентированы детали, подготовленные для подачи в патрон. В произвольном положении останавливаются также и валы 2, 3 и поводок 21. Для захвата следующей детали зажимные губки необходимо развернуть в исходное положение, для чего служит механизм их разворота, который работает следующим образом. В полость пневмоцилиндра 15 по трубопроводу 25 поступает сжатый воздух. Шток 17, преодолевая момент трения муфты, предельная величина которого регулируется пружиной 13, перемещается совместно с поперечной осью 18. В результате взаимодействия подшипника 19 и криволинейной поверхности паза 22 происходит разворот поводка 21 и зажимных губок 7 в исходное положение. Наличие подшипника 20, скользяш его по пазу 24 направляющей стойки, предохраняет щток 17 от изгиба. Выполнение паза 22 с криволинейными углублениями 23 обеспечивает надежность и точность разворота поводка в исходное положение. Одновременно с подачей воздуха в пневмоцилиндр 15 поступает команда на перемеш,ение руки робота на исходные позиции. Схват готов к зажатию и переносу следующей детали. При поступлении очередной команды на захват детали одновременно осуществляется сброс давления в механизме возврата губок. Шток 17 возвращается в исходное положение. Изобретение в результате расширения технологических возможностей схвата робота путем установки изделий во вращающиеся части станков без их останова способствует повышению производительности труда на предприят-иях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1981 |
|
SU994256A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
1. СХВАТ РОБОТА, содержащий корпус и зажимные губки с приводом перемещения, отличающийся тем, что, с целью расщирения технологических возможностей за счет установки изделий во вращающиеся части станков без их останова, он снабжен расположенными в корпусе и кинематически связанными между собой валами, поводком / с пазом и механизмом разворота зажимных губок в исходное положение, причем на конце одного вала смонтированы зажимные губки с приводом перемещения, а на конце другого вала через поводок с пазом - механизм разворота зажимных губок в исходное положение. 2.Схват по п. 1, отличающийся тем, что он снабжен направляющей стойкой, а механизм разворота зажимных губок в исходное положение соде;ржит пневмоцилиндр, на щтоке которого закреплена поперечная ось, входящая одним концом в паз поводка, а другим - в паз направляющей стойки, жестко связанной с пневмоцилиндром. 3.Схват по п. 1, отличающийся тем, что с целью повышения надежности и точности i разворота зажимных губок в исходное положение, в пазу поводка выполнены криво(О линейные углубления симметрично относительно оси поводка. 2f ,fy 18 IC 4; to 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват промышленного робота | 1979 |
|
SU776914A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
