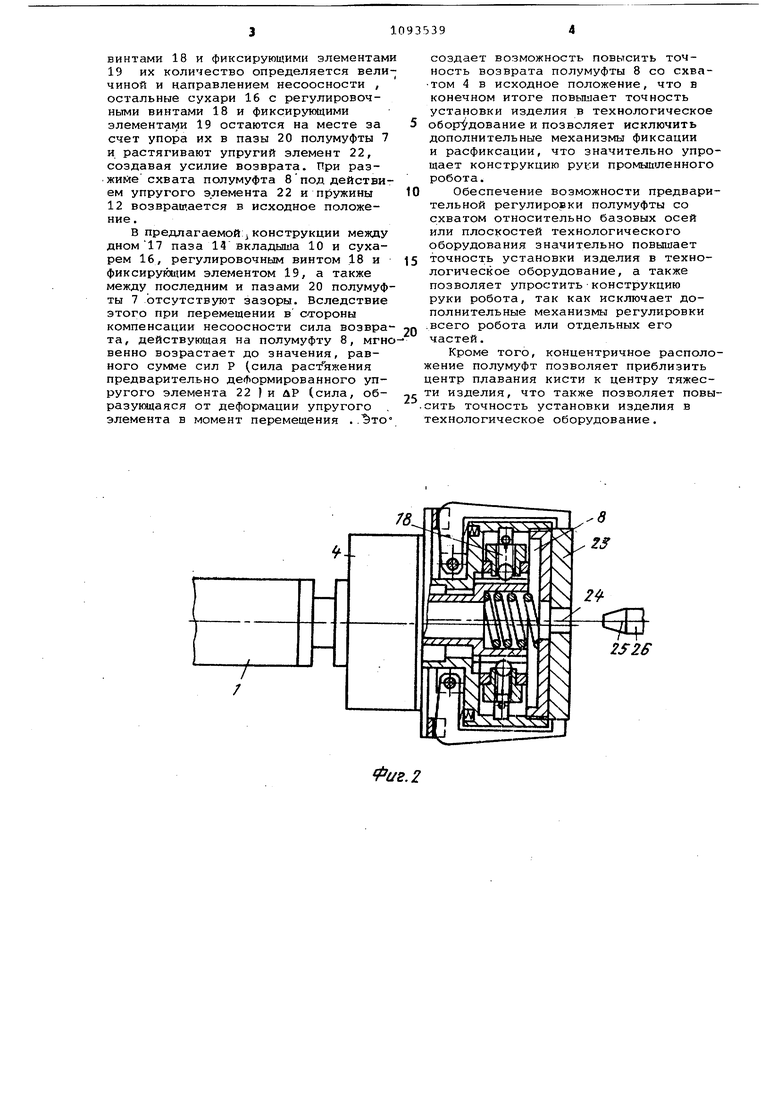
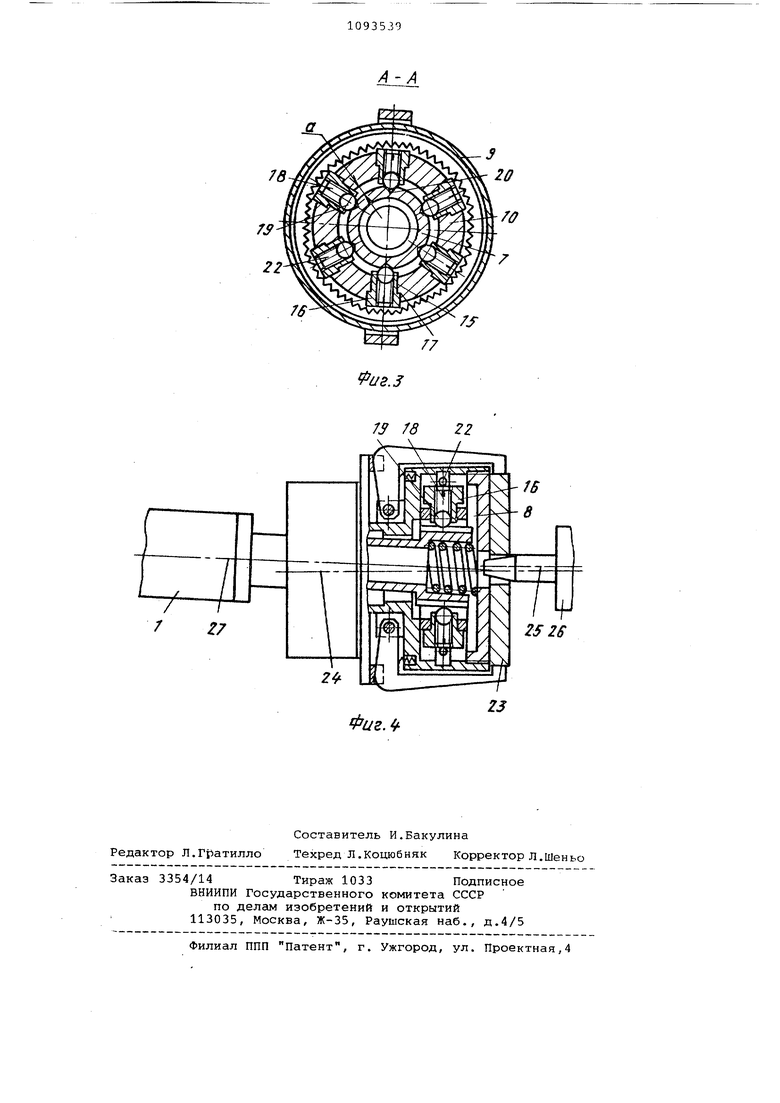
Изобретение относится к мааиностроению, в частности к конструкциям промышленных роботов, и может быть использовано приюснащении тех нологического оборудования средствами автоматической загрузки и выгрузки изделий. Известен промышленный робот, рука которого содержит плечо, кисть со схватом и упругое соединяющее их устройство Cl. Недостатком известного устройства является низкая точность установ ки изделия в технологическое оборудование, обусловленная нарушением первоначального центрирования, вызванного необходимость-. расфиксацИи плеча руки и кисти, а также значительным удалением центра тяжести изделия от условного п.ентра плавания кисти Целью изобретения является повышение точности установки издели в технологическое оборудование. Цель достигается тем, что в руке промышленного робота, содержащей плечо, кисть со схватом и упругое соединяющее их устройство, последнее выполнено в виде двух полумуфт, кондентрично расположенных друг относительно друга, в одной из которых имеется упругий элемент и сухари с установленными в них регулировочными винтами, а в пазах второй - фиксирующие элементы, при этом первая полумуфта связана со схватом, а вторая - жестко соединена с плечом. На фиг.1 изображена рука промышленного робота, продольный разрез; на фиг. 2 - положение руки промышленного робота после регулировки ее относительно оси приспособления , на фиг. 3 - разрез А-А на фиг.1; на фиг. 4 - положение руки промьшше ного робота при загрузке изделия в приспособление. Рука промышленного робота содер жит плечо 1, кисть 2, упругое соеди няющее устройство 3 и схват 4. Схват 4 имеет силовой цилиндр 5 и зажимные губки 6. Упругое соединяю щее устройство выполнено в виде двух полумуфт 7 и 8, концентрично расположенных одна относительно дру гой с возможностью относительного радиального и углового перемещения Полумуфта 7 жестко соединена с пле чом 1. Полумуфта 8 выполнена в вид станка 9 и закрепленного в нем вкл дыша 10 и поджата к торцу 11 полумуфты 7 пружиной 12 и резьбовой крышкой 13. Вкладыш 10 имеет продо ные пазы 14 и радиальные отверстия 15, в которые вставлены сухары 16, упирающиеся в дно 17 пазов 14. В сухари 16 ввинчены регулировочные винты 18, поджимающие фиксирующие элементы 19 к пазам 20 полумуфты 7. Фиксирующие элементы 19 выполнены, например, в виде шариков или пальцев со сферическим торцом. На наружной поверхности вкладыша 10 выполнена кольцевая канавка 21 для упругого элемента 22, охватывающего сухари 16. Изделие 23 зажимается схватом 4. При этом ось 24 детали 23 и ось 25 технологического оборудования 26, например приспособленйя, перед началом работы настраиваются строго сроено. Устройство работает следующим образом. Перед началом эксплуатации робота производится настройка руки робота относительно базовых осей или плоскостей технологического или загрузочного оборудования. -С помощью регулировочных винтов 18 полумуфта 8 со схватом 4 и зажатЕдм изделием 23 радиально смещается относительно полумуфты 7 и руки промыишенного робота 1 до тех пор, пока ось 24 детали 23 и -полумуфты 8 не установится строго соосно относительно оси 25 приспособления 26. После настройки полумуфта 8 удерживается в нужном положении за счет воздействия упругого элемента 22 на сухари 16 и установленные в них регулировочные винты 18, которые обеспечивают одновременный контакт сухарей 16 с дном 17 паза 14, регулировочного винта 18 с фиксирующим элементом 19 и последнего с пазами 20 полумуфты 7. Кроме того, полумуфта 8 поджата к торцу 11 полумуфты 7 пружиной 12. После зажима схватом 4 детали 23 рука перемещается на заданную -позицию в зону приспособления 26. При продольном перемещеНИИ вдоль оси плеча 1 из-за несовпадения осей 24 и 25 детали 23 и приспособления 26, образованного вследствие неточности позиционирования робота, в момент контакта детали 23 с приспособлением 26 возникают дополнительные осевые и радиальные нагрузки,1воздействующие на полумуфту 8. Осевая нагрузка воспринимается пружиной 12. При этом полумуфта 8 с фиксирующими элементами 19 перемещается вдоль полумуфты 7 по пазам 20. Под действием радиальных нагрузок полумуфта 8 радиально перемещается в пределах радиального зазора а на величину несоосности. Совокупность осевых и радиальных перемещений обеспечивает угловую компенсацию несоосности осей 24 и 25 полумуфты 8 с изделием 23 и приспособления 26. При перемещении полумуфты 8 в направлении компенсации несоосности в этом же направлении перемещается часть сухарей 16 с регулировочными
винтами 18 и фиксирующими элементами 19 их количество определяется величиной и направлением несоосности , остальные сухари 16 с регулировочными винтами 18 и фиксирующими элементами 19 остаются на месте за счет упора их в пазы 20 полумуфты 7 и растягивают упругий элемент 22, создавая усилие возврата. При раз.жийе схвата полумуфта 8 под действием упругого э.лемента 22 и пружины 12 возвращается в исходное положение .
В предлагаемой:jконструкции между дном17 паза 14 вкладыша 10 и сухарем 16, регулировочным винтом 18 и фиксирующим элементом 19, а также между последним и пазами 20 полумуфты 7 отсутствуют зазоры. Вследствие этого при перемещении в стороны компенсации несоосности сила возвра та, действующая на полумуфту 8, мгновенно возрастает до значения, равного сумме сил Р (сила растяжения предварительно деформированного упругого элемента 22 ) и ЛР (сила, образунвдаяся от деформации упругого элемента в момент перемещения . .йтосоздает возможность повысить точность возврата полумуфты 8 со схватом 4 в исходное положение, что в конечном итоге повьппает точность установки изделия в технологическое 5 оборудование и позволяет исключить дополнительные механизмы фиксации и расфиксации, что значительно упрощает конструкцию рууи промыйшенного робота.
0
Обеспечение возможности предварительной регулировки полумуфты со схватом относительно базовых осей или плоскостей технологического оборудования значительно повышает точность установки изделия в техно5логическое оборудование, а также позволяет упроститьконструкцию руки робота, так как исключает дополнительные механизмы регулировки .всего робота или отдельных его
0 частей.
Кроме того, концентричное расположение полумуфт позволяет приблизить центр плавания кисти к центру тяжести изделия, что также позволяет повы5сить точность установки изделия в технологическое оборудование.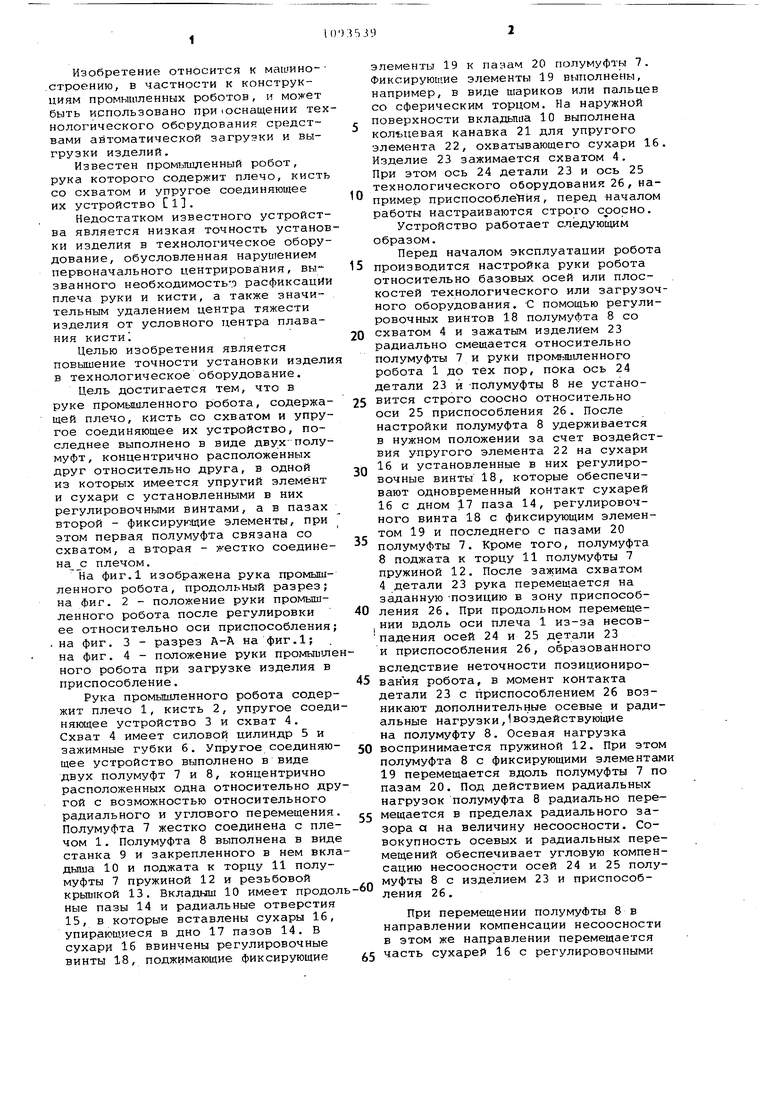
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
| Робото-технологический комплекс | 1985 |
|
SU1328189A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
РУКА ПРОМЫШЛЕННОГО РОБОТА, содержащая плечо, кисть со схватом и упругое соединяющее их устройство, отличающаяся тем, что,с целью повьшения точности установки изделия в технологическое оборудование, упругое соединяющее устройство выполнено в виде двух полумуфт, концентрично расположенных друг относительно друга, в одной из которых имеется упругий элемент и сухари с установленными в них регулировочными винтами, а в пазах второй - фиксирующие элементы, при этом первая полумуфта связана со схватом,а втораяукестко соединена с плечом. (Л с со оо СП со 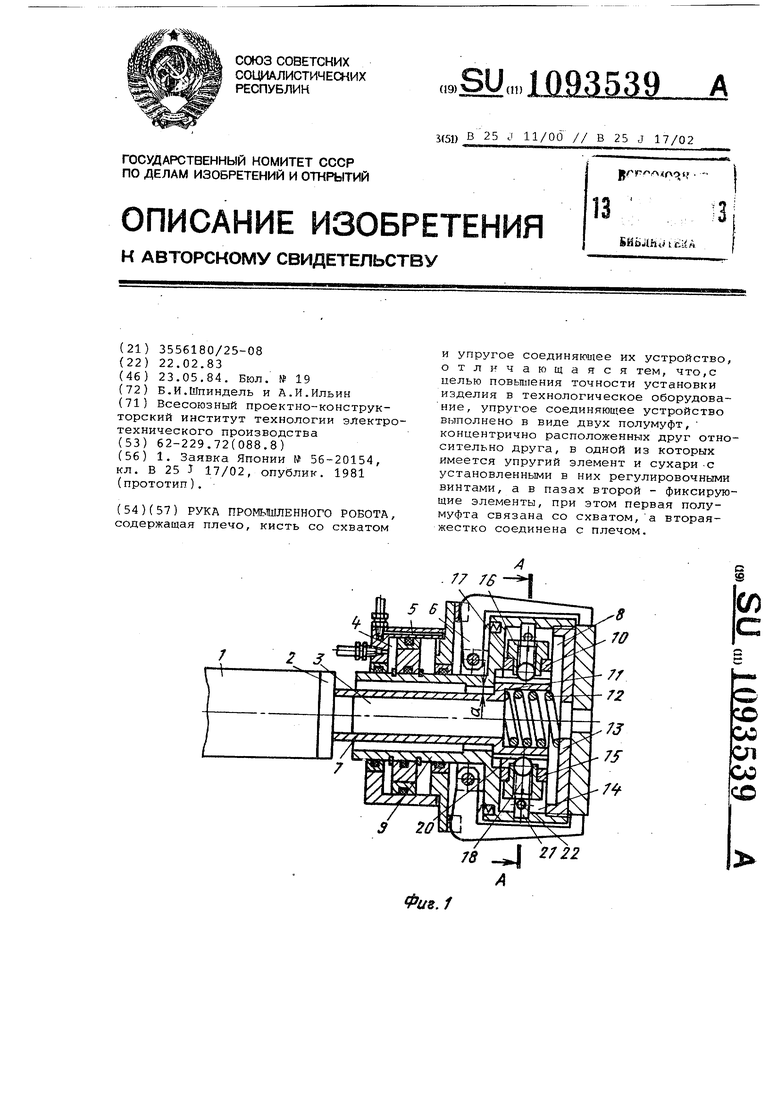
Фиг. 2
76
76
7S
77
иг.з
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
